
- 1python小游戏开心消消乐制作4-点击消除事件
- 2《已解决: docker: Error response from daemon: driver failed programming external connectivity on endpoin
- 3基于Repo和Git的版本管理 (转)_repo仓库改成git仓库
- 4Spring中的AOP原理_springaop原理
- 5Spark编程实验五:Spark Structured Streaming编程_①syslog通过socket传送到spark
- 6代码随想录算法训练营DAY32|C++贪心算法Part.2|122.买卖股票的最佳时机II、55.跳跃游戏、45.跳跃游戏II_c++股票买卖
- 7国内AIGC工具是否存在版权争议?( 计育韬老师高校公益巡讲答疑实录2024)
- 8unity打的 iOS-遇到 dyld: Library not loaded: @rpath/libswiftCore.dylib 解决方法
- 9详解pandas的read_csv方法_pandas读取文件csv
- 10DM模式对象的基本操作_dm数据库设置主键递增
神经网络---第一章 基础知识 1.0 人工智能与神经网络_人工智能1.0
赞
踩
0、背景

一个对中文一窍不通,只说英语的人关在一个封闭房间中。房间里有一本用英文写成的手册,指示该如何处理收到的汉语信息及如何以汉语相应地回复。房外的人向房间内递进用中文写成的问题。房内的人便按照手册的说明,查找到合适的指示,将相应的中文字符组合成对问题的解答,并将答案递出。
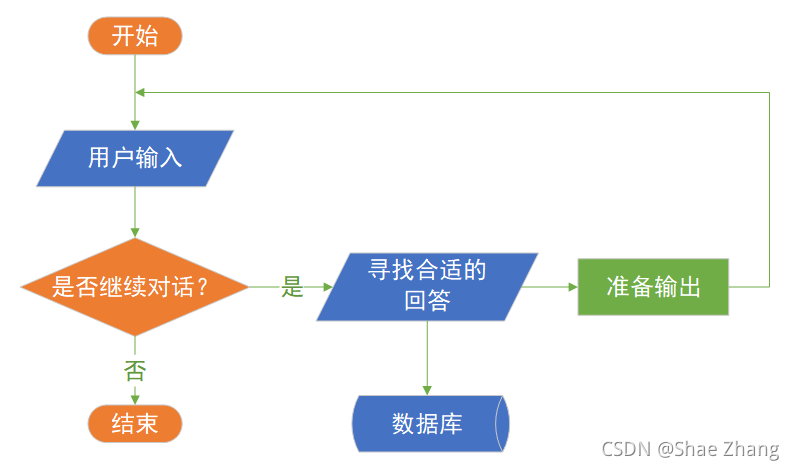
房间外面的人看到自己递进去的中文输入能得到回答,很可能就会认为房间内的人有智能,懂中文,就像现在的聊天机器人那样,那么这是“智能”么?读者们如果写过一些程序,就会想,我也可以写一个程序,根据一些规则和已有的数据,和用户进行某种程度的智能对话,那么AI和我的程序有区别么?
1、人工智能
(1)基本定义
a.智能地把某件特定的事情做好,在某个领域增强人类的智慧,这种方式又叫做智能增强
像搜索引擎,自动语言翻译,某个领域的智能助手那样的程序,帮助人类完成某种特定任务。这也叫做“弱人工智能”,或者“狭义人工智能”。
b.像人类一样能认知,思考,判断:模拟人类的智能
像人类一样能认知,思考,判断的智能软件。这是人工智能学科一开始就有的梦想。这样的智能也叫做“通用人工智能”(Artificial General Intelligence, AGI), 或“强人工智能”。对于这样的人工智能,科幻小说有很多描写,也有一些研究,但是在实际的应用还没有什么突破。有学者认为,AGI是不可能通过目前人们编程程序的方式实现的 。尽管如此,社会上还是有人担忧有一天电脑的AGI会超过人类的智能,人类再也赶不上电脑,从而永远受制于电脑。
(2) 第二个层面,从技术的特点来看
如果一个程序解决任务(T)的效能(用P表示)随着经验(E)得到了提高,那么,这个程序就能从经验(E)中学到了关于任务(T)的知识,并让衡量值(P)得到提高。
a. 选择一个模型结构(例如逻辑回归,决策树等),这就是上面说的程序。
b. 用训练数据(输入和输出)输入模型。这就是上面的经验(E)。
c. 通过不断执行任务(T)并衡量结果(P),让P不断提高,直到达到一个满意的值。
机器学习的各种方法是如何从经验中学习呢?
-
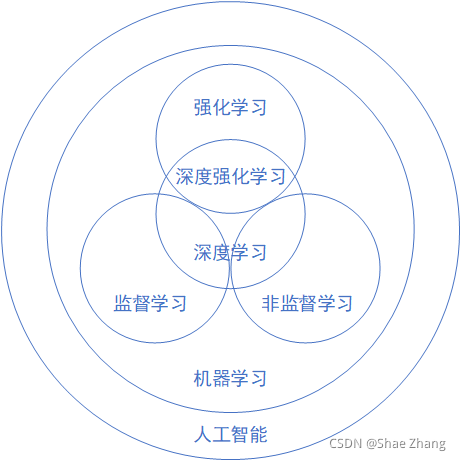
监督学习(Supervised Learning)
通过标注的数据来学习,例如,程序通过学习标注了正确答案的手写数字的图像数据,它就能认识其他的手写数字。 -
无监督学习(Unsupervised Learning)
通过没有标注的数据来学习。这种算法可以发现数据中自然形成的共同特性(聚类),可以用来发现不同数据之间的联系,例如,买了商品A的顾客往往也购买了商品B。 -
强化学习(Reinforcement Learning)
我们可以让程序选择和它的环境互动(例如玩一个游戏),环境给程序的反馈是一些“奖励”(例如游戏中获得高分),程序要学习到一个模型,能在这种环境中得到高的分数,不仅是当前局面要得到高分,而且最终的结果也要是高分才行。
综合来看,如果我们把机器学习当作一个小孩,那么,教育小孩的方式就有根据正确答案指导学习(监督学习);根据小孩实践的过程给予各种鼓励(强化学习);还有自由探索世界,让小孩自己总结规律(无监督学习)。
(3) 第三个层面,从应用的角度来看,我们看到狭义人工智能在各个领域都取得了很大的成果。
- 翻译领域(微软的中英翻译超过人类)
- 阅读理解(SQuAD 比赛)
- 下围棋(2016)德州扑克(2019)麻将(2019)
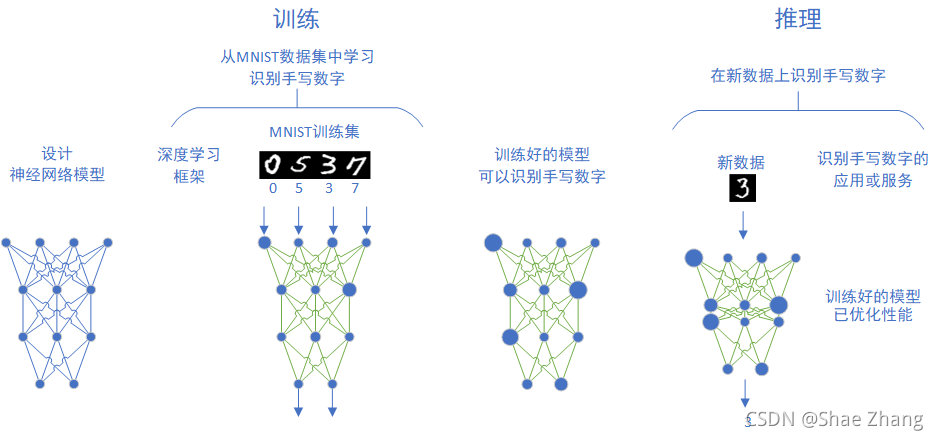
首先我们要设计一个模型,然后用已经标注过的数据来训练这个模型,在训练过程中,模型的各个参数在多次训练中不断得到调整,最后得到了一个达到要求的模型。这个模型会被用于一个推理模型中,和其它程序模块一起组成一个应用程序或者是服务,能处理新的数据,满足用户的需求。
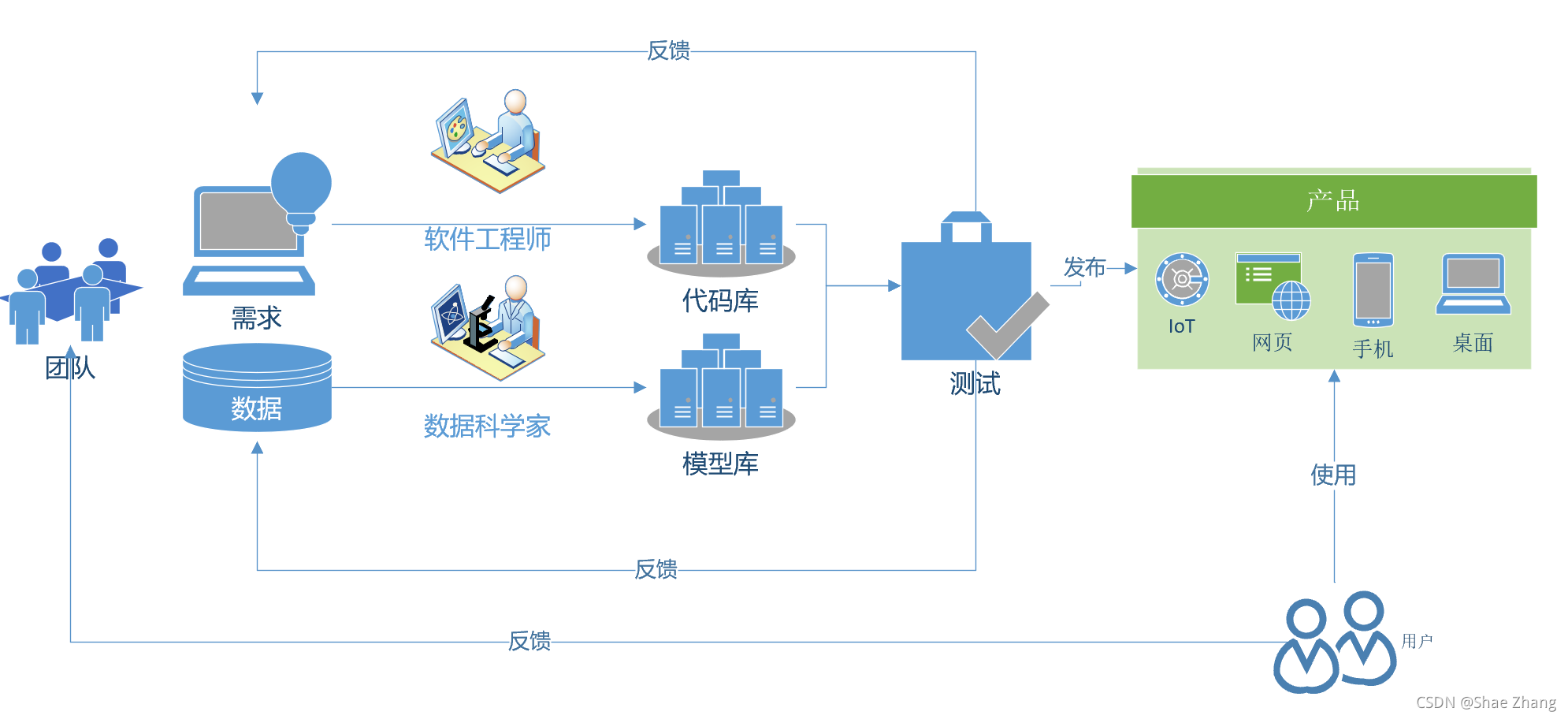
在现代软件开发流程中,程序的开发,和AI模型的开发的生命周期应该如何协作呢?软件工程师和数据科学家并肩工作,一个完善代码库,另一个完善模型库,最后的产品通过各种途径(网页/桌面程序/手机/IoT设备)交到用户手中
2、范式的演化
从Jim Gray的著作可以看到,现在谈论的AI大潮就是属于data exploration这个范式转换(颠覆性的改变)的一部分。
(1)范式演化的四个阶段
第一个阶段:经验
从几千年前到几百年前,人们描述自然现象,归纳总结一些规律。
人类最早的科学研究,主要以记录和描述自然现象为特征,不妨称之为称为“经验归纳”(第一范式)。人们看到自然现象,凭着自己的体验总结一些规律,并把规律推广到其他领域。这些规律通常是定性的,不是定量的。
第二个阶段:理论
这一阶段,科学家们开始明确定义,速度是什么,质量是什么,化学元素是什么(不再是五行和燃素)……也开始构建各种模型,在模型中尽量撇除次要和无关因素,例如我们在中学的物理实验中,要假设“斜面足够光滑,无摩擦力”,“空气阻力可以忽略不计”,等等。
第三个阶段:计算仿真
从二十世纪中期开始,利用电子计算机对科学实验进行模拟仿真的模式得到迅速普及,人们可以对复杂现象通过模拟仿真,推演更复杂的现象,典型案例如模拟核试验、天气预报等。这样计算机仿真越来越多地取代实验,逐渐成为科研的常规方法。科学家先定义问题,确认假设,再利用数据进行分析和验证。
第四个阶段:数据探索
在这个阶段,科学家收集数据,分析数据,探索新的规律。在深度学习的浪潮中出现的许多结果就是基于海量数据学习得来的。有些数据并不是从现实世界中收集而来,而是由计算机程序自己生成,例如,在AlphaGo算法训练的过程中,它和自己对弈了数百万局,这个数量大大超过了所有记录下来的职业选手棋谱的数量。
(2)范式各阶段应用
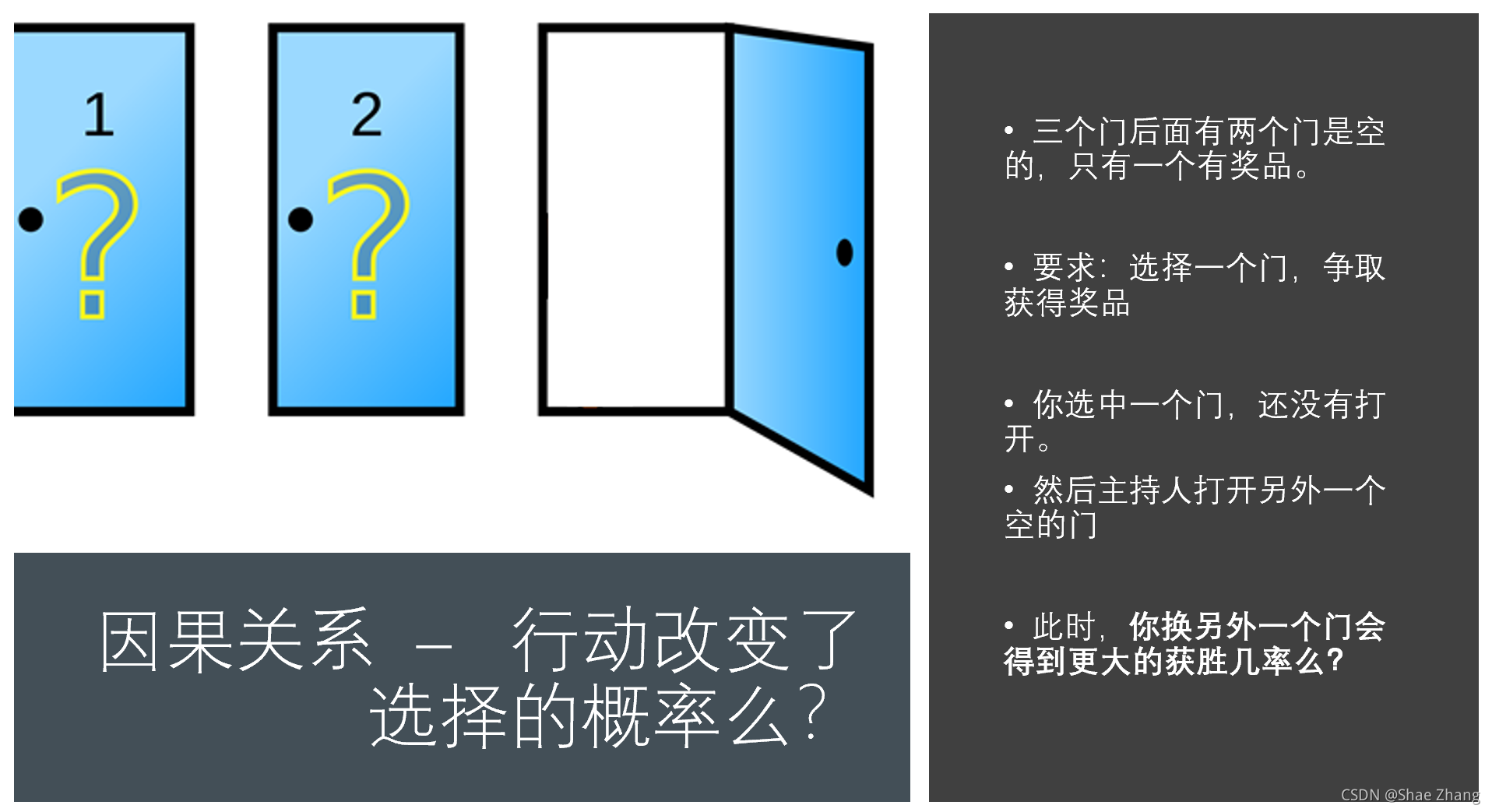
顾客参加一个抽奖活动,三个关闭的门后面只有一个有奖品,顾客选择一个门之后,主持人会打开一个没有奖品的门,并给顾客一次改变选择的机会。此时,改选另外一个门会得到更大的获奖几率么?
a.经验归纳
我们生活中的确碰到过各种抽奖时刻,有时候我们看似有很多赚大钱的机会,但是往往赢家不是自己。从这些生活经验出发,我们的直觉告诉我们要怎么选择呢?(我们做了调查,同学们的“基于生活经验的直觉”是这样分布的:X:Y)很多人会是从生活经验出发,感觉自己会中计,因此决定“我换了就上当了,我不换”,“我改变选择对运气不好,我不换”。当然,我们还可以用类比推理的办法,如果是100扇门,只有一扇门后面有奖品,我选中了一扇门,裁判打开了另外98个没有奖品的门,这个时候,我要换门么?
b.理论推导
本书的读者大多学过基本的概率知识,我们可以用概率的基本方法来解这一道题目。
设 A A A为第一次选到了中奖门的概率, B B B为改变选择后选到了中奖门的概率, C C C为未改变选择后选到了中奖门的概率。
P ( A ) = 1 3 P(A)=\frac{1}{3} P(A)=31 (初始选择就是获奖门的获奖概率是 1 3 \frac{1}{3} 31)
P ( A ′ ) = 2 3 P(A')=\frac{2}{3} P(A′)=32 (当选中一个门之后, 其它两个门的获奖概率是 2 3 \frac{2}{3} 32)
P ( B ∣ A ) = 0 P(B|A)=0 P(B∣A)=0 (用户先选择了一个门,奖品在这个门后,用户后来改变选择,他的获奖概率是 0)
P ( C ∣ A ) = 1 P(C|A)=1 P(C∣A)=1(用户选择了一个门,奖品在门后,后来他不改变选择,他的获奖概率是 1)
P ( B ∣ A ′ ) = 1 P(B|A')=1 P(B∣A′)=1, P ( C ∣ A ′ ) = 0 P(C|A')=0 P(C∣A′)=0(类似地, 用户首次选择的门后面没有奖品,他改变选择后,获奖概率是 1, 不改变选择,那么获奖概率是 0)
P ( B ) = P ( B ∣ A ) × P ( A ) + P ( B ∣ A ′ ) × P ( A ′ ) = 2 3 P(B)=P(B|A) \times P(A) + P(B|A') \times P(A')=\frac{2}{3} P(B)=P(B∣A)×P(A)+P(B∣A′)×P(A′)=32(所以,改变选择后中奖的概率,等于 2 3 \frac{2}{3} 32)
P ( C ) = P ( C ∣ A ′ ) × P ( A ′ ) + P ( C ∣ A ) × P ( A ) = 1 3 P(C)=P(C|A') \times P(A') + P(C|A) \times P(A)=\frac{1}{3} P(C)=P(C∣A′)×P(A′)+P(C∣A)×P(A)=31(不改变选择而中奖的概率,等于 1 3 \frac{1}{3} 31,和A 一样)
结论: P ( B ) > P ( C ) P(B)>P(C) P(B)>P(C)
c.数据模拟
我们还可以用数据模拟的方法,来看看在各种情况下,换或者不换的结果如何。
看我们的Python程序示例。
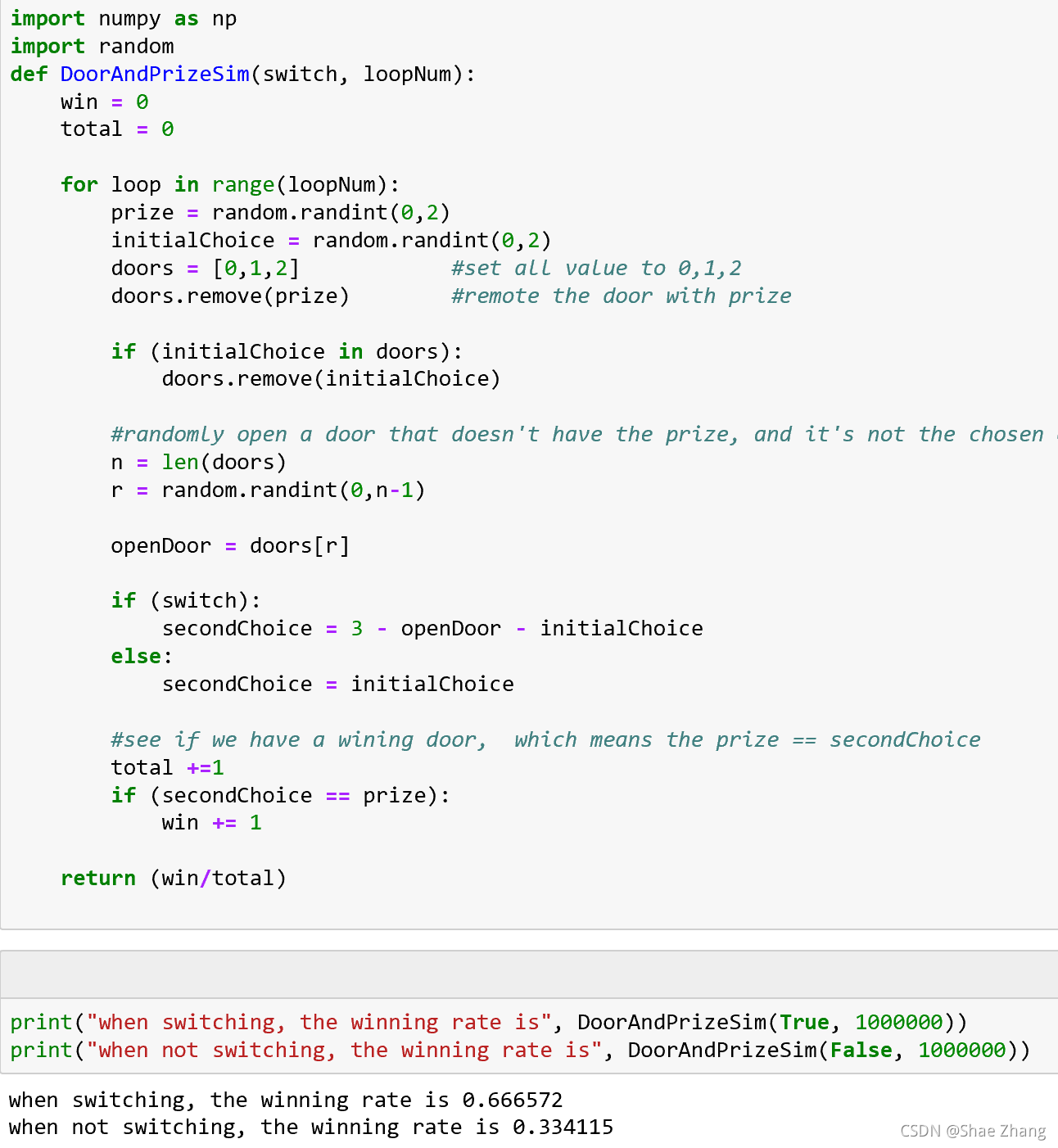
我们看到,当我们随机模拟一百万轮换门(switching)和不换门(not switching)的情况后,我们得到了这样的结果:
- 换门:最后得奖的概率是0.666572(约 2 3 \frac{2}{3} 32)
- 不换门:最后得奖的概率是 0.334115(约 1 3 \frac{1}{3} 31)
d.数据探索
当人类探索客观世界的时候,大部分情况下,我们是不了解新环境的运行规则的。这个时候,我们可以观察自己的行动和客观世界的反馈,判断得失,再总结出规律。这种学习方法,叫强化学习(Reinforcement Learning),可以使用这种方法来找出适合的策略。
3、神经网络的基本工作原理简介
(1)神经元细胞的数学模型

神经网络由基本的神经元组成,上图就是一个神经元的数学/计算模型,便于我们用程序来实现。
输入 input
(x1,x2,x3) 是外界输入信号,一般是一个训练数据样本的多个属性,比如,我们要预测一套房子的价格,那么在房屋价格数据样本中,x1可能代表了面积,x2可能代表地理位置,x3可能朝向。另外一个例子是,假设(x1,x2,x3)分别代表了(红,绿,蓝)三种颜色,而此神经元用于识别输入的信号是暖色还是冷色。
权重 weights
(w1,w2,w3) 是每个输入信号的权重值,以上面的 (x1,x2,x3) 的例子来说,x1的权重可能是0.92,x2的权重可能是0.2,x3的权重可能是0.03。当然权重值相加之后可以不是1。
偏移 bias
还有个b是怎么来的?一般的书或者博客上会告诉你那是因为 y = w x + b y=wx+b y=wx+b,b是偏移值,使得直线能够沿Y轴上下移动。这是用结果来解释原因,并非b存在的真实原因。从生物学上解释,在脑神经细胞中,一定是输入信号的电平/电流大于某个临界值时,神经元细胞才会处于兴奋状态,这个b实际就是那个临界值。亦即当:
w 1 ⋅ x 1 + w 2 ⋅ x 2 + w 3 ⋅ x 3 > = t w_1 \cdot x_1 + w_2 \cdot x_2 + w_3 \cdot x_3 >= t w1⋅x1+w2⋅x2+w3⋅x3>=t
时,该神经元细胞才会兴奋。我们把t挪到等式左侧来,变成 ( − t ) (-t) (−t),然后把它写成b,变成了:
w 1 ⋅ x 1 + w 2 ⋅ x 2 + w 3 ⋅ x 3 + b > = 0 w_1 \cdot x_1 + w_2 \cdot x_2 + w_3 \cdot x_3 + b >= 0 w1⋅x1+w2⋅x2+w3⋅x3+b>=0
于是b诞生了!
求和计算 sum
Z
=
w
1
⋅
x
1
+
w
2
⋅
x
2
+
w
3
⋅
x
3
+
b
=
∑
i
=
1
m
(
w
i
⋅
x
i
)
+
b
在上面的例子中m=3。我们把 w i ⋅ x i w_i \cdot x_i wi⋅xi变成矩阵运算的话,就变成了:
Z = W ⋅ X + b Z = W \cdot X + b Z=W⋅X+b
激活函数 activation
求和之后,神经细胞已经处于兴奋状态了,已经决定要向下一个神经元传递信号了,但是要传递多强烈的信号,要由激活函数来确定:
A = σ ( Z ) A=\sigma{(Z)} A=σ(Z)
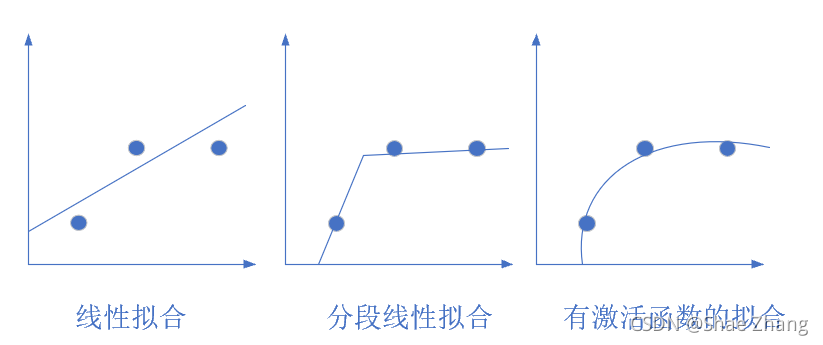
如果激活函数是一个阶跃信号的话,会像继电器开合一样咔咔的开启和闭合,在生物体中是不可能有这种装置的,而是一个渐渐变化的过程。所以一般激活函数都是有一个渐变的过程,也就是说是个曲线,如下图所示。
至此,一个神经元的工作过程就在电光火石般的一瞬间结束了。
小结
- 一个神经元可以有多个输入。
- 一个神经元只能有一个输出,这个输出可以同时输入给多个神经元。
- 一个神经元的w的数量和输入的数量一致。
- 一个神经元只有一个b。
- w和b有人为的初始值,在训练过程中被不断修改。
- A可以等于Z,即激活函数不是必须有的。
- 一层神经网络中的所有神经元的激活函数必须一致。
(2)神经网络的训练过程
单层神经网络模型
这是一个单层的神经网络,有m个输入 (这里m=3),有n个输出 (这里n=2)。在神经网络中, b b b 到每个神经元的权值来表示实际的偏移值,亦即 ( b 1 , b 2 ) (b_1,b_2) (b1,b2),这样便于矩阵运算。也有些人把 b b b 写成 x 0 x_0 x0,其实是同一个效果,即把偏移值看做是神经元的一个输入。
- ( x 1 , x 2 , x 3 ) (x_1,x_2,x_3) (x1,x2,x3)是一个样本数据的三个特征值
- ( w 11 , w 21 , w 31 ) (w_{11},w_{21},w_{31}) (w11,w21,w31)是 ( x 1 , x 2 , x 3 ) (x_1,x_2,x_3) (x1,x2,x3)到 n 1 n1 n1的权重
- ( w 12 , w 22 , w 32 ) (w_{12},w_{22},w_{32}) (w12,w22,w32)是 ( x 1 , x 2 , x 3 ) (x_1,x_2,x_3) (x1,x2,x3)到 n 2 n2 n2的权重
- b 1 b_1 b1是 n 1 n1 n1的偏移
-
b
2
b_2
b2是
n
2
n2
n2的偏移

大家可以看到,同一个特征 x 1 x_1 x1,对于 n 1 、 n 2 n1、n2 n1、n2来说,权重是不相同的,因为 n 1 、 n 2 n1、n2 n1、n2是两个神经元,它们完成不同的任务(特征识别)。我们假设 x 1 , x 2 , x 3 x_1,x_2,x_3 x1,x2,x3分别代表红绿蓝三种颜色,而 n 1 , n 2 n1,n2 n1,n2 分别用于识别暖色和冷色,那么 x 1 x_1 x1 到 n 1 n1 n1 的权重,肯定要大于 x 1 x_1 x1 到 n 2 n2 n2 的权重,因为 x 1 x_1 x1代表红色,是暖色。
而对于 n 1 n1 n1来说, x 1 , x 2 , x 3 x_1,x_2,x_3 x1,x2,x3输入的权重也是不相同的,因为它要对不同特征有选择地接纳。如同上面的例子, n 1 n1 n1 对于代表红色的 x 1 x_1 x1,肯定是特别重视,权重值较高;而对于代表蓝色的 x 3 x_3 x3,尽量把权重值降低,才能有正确的输出。
训练流程
前提条件
- 首先是我们已经有了训练数据;
- 我们已经根据数据的规模、领域,建立了神经网络的基本结构,比如有几层,每一层有几个神经元;
- 定义好损失函数来合理地计算误差。
步骤
假设我们有表1-1所示的训练数据样本。
表1-1 训练样本示例
| Id | x1 | x2 | x3 | Y |
|---|---|---|---|---|
| 1 | 0.5 | 1.4 | 2.7 | 3 |
| 2 | 0.4 | 1.3 | 2.5 | 5 |
| 3 | 0.1 | 1.5 | 2.3 | 9 |
| 4 | 0.5 | 1.7 | 2.9 | 1 |
其中,x1,x2,x3是每一个样本数据的三个特征值,Y是样本的真实结果值:
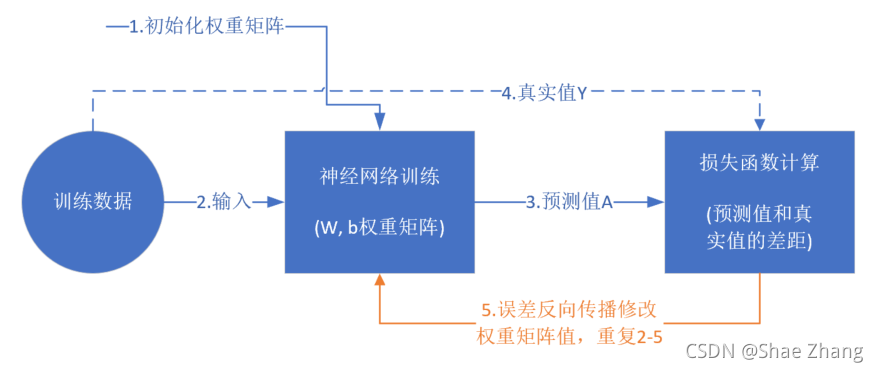
- 随机初始化权重矩阵,可以根据正态分布等来初始化。这一步可以叫做“猜”,但不是瞎猜;
- 拿一个或一批数据作为输入,带入权重矩阵中计算,再通过激活函数传入下一层,最终得到预测值。在本例中,我们先用Id-1的数据输入到矩阵中,得到一个A值,假设A=5;
- 拿到Id-1样本的真实值Y=3;
- 计算损失,假设用均方差函数 L o s s = ( A − Y ) 2 = ( 5 − 3 ) 2 = 4 Loss = (A-Y)^2=(5-3)^2=4 Loss=(A−Y)2=(5−3)2=4;
- 根据一些神奇的数学公式(反向微分),把Loss=4这个值用大喇叭喊话,告诉在前面计算的步骤中,影响A=5这个值的每一个权重矩阵,然后对这些权重矩阵中的值做一个微小的修改(当然是向着好的方向修改,这一点可以用数学家的名誉来保证);
- 用Id-2样本作为输入再次训练(goto 2);
- 这样不断地迭代下去,直到以下一个或几个条件满足就停止训练:损失函数值非常小;准确度满足了要求;迭代到了指定的次数。
训练完成后,我们会把这个神经网络中的结构和权重矩阵的值导出来,形成一个计算图(就是矩阵运算加上激活函数)模型,然后嵌入到任何可以识别/调用这个模型的应用程序中,根据输入的值进行运算,输出预测值。
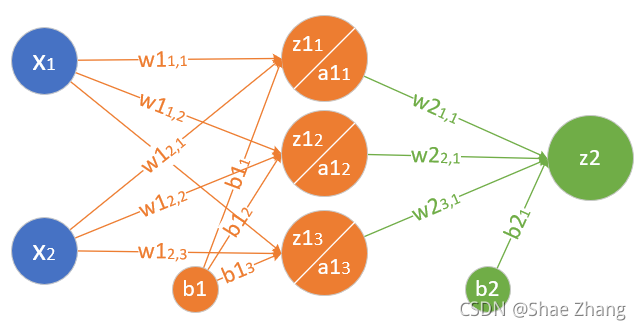
(3)神经网络中的矩阵运算
z
1
1
=
x
1
⋅
w
1
1
,
1
+
x
2
⋅
w
1
2
,
1
+
b
1
1
z1_1 = x_1 \cdot w1_{1,1}+ x_2 \cdot w1_{2,1}+b1_1
z11=x1⋅w11,1+x2⋅w12,1+b11
z
1
2
=
x
1
⋅
w
1
1
,
2
+
x
2
⋅
w
1
2
,
2
+
b
1
2
z1_2 = x_1 \cdot w1_{1,2}+ x_2 \cdot w1_{2,2}+b1_2
z12=x1⋅w11,2+x2⋅w12,2+b12
z
1
3
=
x
1
⋅
w
1
1
,
3
+
x
2
⋅
w
1
2
,
3
+
b
1
3
z1_3 = x_1 \cdot w1_{1,3}+ x_2 \cdot w1_{2,3}+b1_3
z13=x1⋅w11,3+x2⋅w12,3+b13
变成矩阵运算:
z
1
1
=
(
x
1
x
2
)
(
w
1
1
,
1
w
1
2
,
1
)
+
b
1
1
z1_1=
z
1
2
=
(
x
1
x
2
)
(
w
1
1
,
2
w
1
2
,
2
)
+
b
1
2
z1_2=
z
1
3
=
(
x
1
x
2
)
(
w
1
1
,
3
w
1
2
,
3
)
+
b
1
3
z1_3=
再变成大矩阵:
Z
1
=
(
x
1
x
2
)
(
w
1
1
,
1
w
1
1
,
2
w
1
1
,
3
w
1
2
,
1
w
1
2
,
2
w
1
2
,
3
)
+
(
b
1
1
b
1
2
b
1
3
)
Z1 =
最后变成矩阵符号:
Z
1
=
X
⋅
W
1
+
B
1
Z1 = X \cdot W1 + B1
Z1=X⋅W1+B1
然后是激活函数运算:
A
1
=
a
(
Z
1
)
A1=a(Z1)
A1=a(Z1)
同理可得:
Z
2
=
A
1
⋅
W
2
+
B
2
Z2 = A1 \cdot W2 + B2
Z2=A1⋅W2+B2
注意:损失函数不是前向计算的一部分。
(4)神经网络的主要功能
回归(Regression)或者叫做拟合(Fitting)
单层的神经网络能够模拟一条二维平面上的直线,从而可以完成线性分割任务。而理论证明,两层神经网络可以无限逼近任意连续函数。
所谓回归或者拟合,其实就是给出x值输出y值的过程,并且让y值与样本数据形成的曲线的距离尽量小,可以理解为是对样本数据的一种骨架式的抽象。
分类(Classification)
(5)为什么需要激活函数
为什么需要激活函数
生理学上的例子
人体骨关节是动物界里最复杂的生理结构,一共有8个重要的大关节:肩关节、
肘关节、腕关节、髋关节、膝关节、踝关节、颈关节、腰关节。
人的臂骨,腿骨等,都是一根直线,人体直立时,也是一根直线。但是人在骨关节和肌肉组织的配合下,可以做很多复杂的动作,原因就是关节本身不是线性结构,而是一个在有限范围内可以任意活动的结构,有一定的柔韧性。
比如肘关节,可以完成小臂在一个二维平面上的活动。加上肩关节,就可以完成胳膊在三维空间的活动。再加上其它关节,就可以扩展胳膊活动的三维空间的范围。
用表1-2来对比人体运动组织和神经网络组织。
表1-2 人体运动组织和神经网络组织的对比
| 人体运动组织 | 神经网络组织 |
|---|---|
| 支撑骨骼 | 网络层次 |
| 关节 | 激活函数 |
| 肌肉韧带 | 权重参数 |
| 学习各种运动的动作 | 前向+反向训练过程 |
激活函数就相当于关节。
激活函数的作用
看以下的例子:
Z 1 = X ⋅ W 1 + B 1 Z1 = X \cdot W1 + B1 Z1=X⋅W1+B1
Z 2 = Z 1 ⋅ W 2 + B 2 Z2 = Z1 \cdot W2 + B2 Z2=Z1⋅W2+B2
Z 3 = Z 2 ⋅ W 3 + B 3 Z3 = Z2 \cdot W3 + B3 Z3=Z2⋅W3+B3
展开:
Z
3
=
Z
2
⋅
W
3
+
B
3
=
(
Z
1
⋅
W
2
+
B
2
)
⋅
W
3
+
B
3
=
(
(
X
⋅
W
1
+
B
1
)
⋅
W
2
+
B
2
)
⋅
W
3
+
B
3
=
X
⋅
(
W
1
⋅
W
2
⋅
W
3
)
+
(
B
1
⋅
W
2
⋅
W
3
+
B
2
⋅
W
2
+
B
3
)
=
X
⋅
W
+
B
Z 1 , Z 2 , Z 3 Z1,Z2,Z3 Z1,Z2,Z3分别代表三层神经网络的计算结果。最后可以看到,不管有多少层,总可以归结到 X W + B XW+B XW+B的形式,这和单层神经网络没有区别。
如果我们不运用激活函数的话,则输出信号将仅仅是一个简单的线性函数。线性函数一个一级多项式。线性方程是很容易解决的,但是它们的复杂性有限,并且从数据中学习复杂函数映射的能力更小。一个没有激活函数的神经网络将只不过是一个线性回归模型罢了,不能解决现实世界中的大多数非线性问题。
没有激活函数,我们的神经网络将无法学习和模拟其他复杂类型的数据,例如图像、视频、音频、语音等。这就是为什么我们要使用人工神经网络技术,诸如深度学习,来理解一些复杂的事情,一些相互之间具有很多隐藏层的非线性问题。

