
- 1Intel 全球首個實時 Deepfake 檢測器 透過血流判斷人像真偽、準確率達 96%_英特尔实验室开发了世界上首个实时深度伪造检测平台之一
- 2常用服务的集群搭建(redis、MQ、es、zookerper)_es mq
- 3Autodl清除系统盘缓存_如何清理autodl的系统盘?
- 4C语言经典例题-9
- 5健身房预约管理系统(源码+文档)
- 6NPDP|传统行业产品经理如何跨越鸿沟,从用户角度审视产品
- 7大数据bigdata_大数据的5v特征是谁提出了的?
- 8IDEA使用Git下载项目时输错账号密码_idea 查看克隆密码
- 9微信小程序开发教程:利用nodejs从mysql数据库获取一个数据,并显示到微信小程序_小程序获取数据库数据并返回显示
- 10NLP预训练模型5 -- 模型结构优化(XLNet、ALBERT、ELECTRA)_albert-chinese tiny模型结构详解
VINS-FUSION 前端后端代码全详解_vins fusion
赞
踩
本次工作
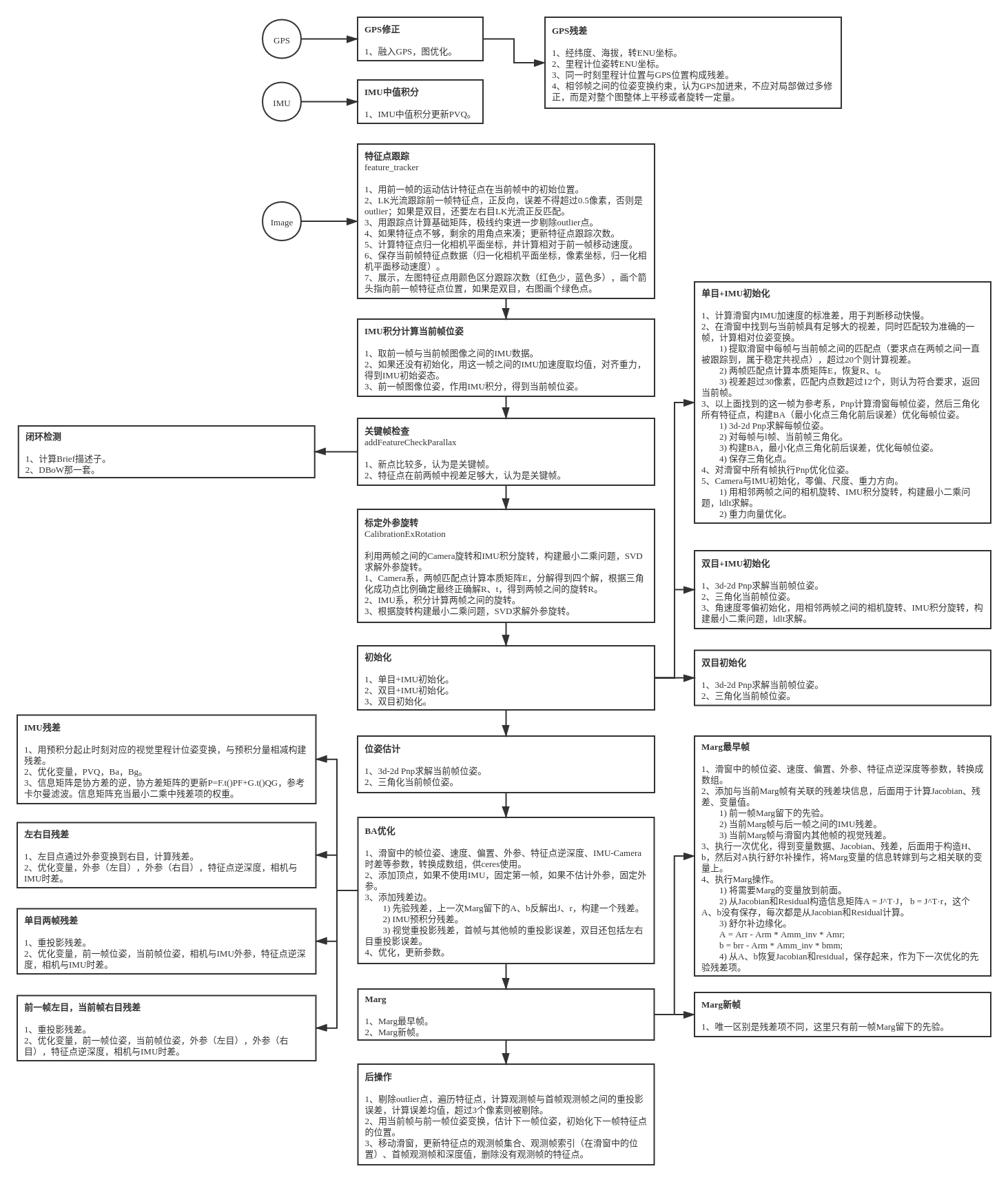
我首先参照网络上的文档整理了全部的代码,并对于C++和OpenCV的一些操作也进行了详细的注释,并写了这篇的博客进行全部的讲解,其中1-4章节是前端VIO信息,5章节是后端DBOW词袋回环,6-7章节是GPS与VIO融合,8章节是参考文献。
1. 程序入口rosNodeTest.cpp
1.1 定义内容
运行程序时,首先进入的是主程序vins_estimator/src/estimator/rosNodeTest.cpp
里边主要定义了 估计器、 缓存器 、 获取传感器数据的函数 和 一个主函数
// 获得左目的message
void img0_callback(const sensor_msgs::ImageConstPtr &img_msg)
// 获得右目的message
void img1_callback(const sensor_msgs::ImageConstPtr &img_msg)
// 从msg中获取图片,返回值cv::Mat,输入是当前图像msg的指针
cv::Mat getImageFromMsg(const sensor_msgs::ImageConstPtr &img_msg)
// 从两个主题中提取具有相同时间戳的图像
// 并将图像输入到估计器中
void sync_process()
// 输入imu的msg信息,进行解算并把imu数据输入到estimator
void imu_callback(const sensor_msgs::ImuConstPtr &imu_msg)
// 把特征点的点云msg输入到estimator
void feature_callback(const sensor_msgs::PointCloudConstPtr &feature_msg)
// 是否重启estimator,并重新设置参数
void restart_callback(const std_msgs::BoolConstPtr &restart_msg)
// 是否使用IMU
void imu_switch_callback(const std_msgs::BoolConstPtr &switch_msg)
// 相机的开关
void cam_switch_callback(const std_msgs::BoolConstPtr &switch_msg)
int main(int argc, char **argv)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
1.2 程序执行
1.2.1 获取参数并设置参数
具体的方法在函数
主函数中,主要是执行以下各个步骤订阅ROS信息,然后进行处理
string config_file = argv[1];
printf("config_file: %s\n", argv[1]);
//config_file: 4VINS_test/0config/yaml_mynt_s1030/mynt_stereo_imu_config.yaml
readParameters(config_file);// 读取参数
estimator.setParameter();// 设置参数
- 1
- 2
- 3
- 4
- 5
- 6
/*
ros::Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints())
第一个参数是订阅话题的名称;
第二个参数是订阅队列的长度;(如果收到的消息都没来得及处理,那么新消息入队,旧消息就会出队);
第三个参数是回调函数的指针,指向回调函数来处理接收到的消息!
第四个参数:似乎与延迟有关系,暂时不关心。(该成员函数有13重载)
*/
ros::Subscriber sub_imu = n.subscribe(IMU_TOPIC, 2000, imu_callback, ros::TransportHints().tcpNoDelay());
ros::Subscriber sub_feature = n.subscribe("/feature_tracker/feature", 2000, feature_callback);
ros::Subscriber sub_img0 = n.subscribe(IMAGE0_TOPIC, 100, img0_callback);
ros::Subscriber sub_img1 = n.subscribe(IMAGE1_TOPIC, 100, img1_callback);
ros::Subscriber sub_restart = n.subscribe("/vins_restart", 100, restart_callback);
ros::Subscriber sub_imu_switch = n.subscribe("/vins_imu_switch", 100, imu_switch_callback);
ros::Subscriber sub_cam_switch = n.subscribe("/vins_cam_switch", 100, cam_switch_callback);
std::thread sync_thread{sync_process}; //创建sync_thread线程,指向sync_process,这里边处理了processMeasurements的线程
ros::spin(); // 用于触发topic, service的响应队列
// 如果你的程序写了相关的消息订阅函数,那么程序在执行过程中,除了主程序以外,ROS还会自动在后台按照你规定的格式,接受订阅的消息,但是所接到的消息并不是
// 立刻就被处理,而是必须要等到ros::spin()或ros::spinOnce()执行的时候才被调用,这就是消息回到函数的原理
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
其中有几个比较重要的函数,在下方进行说明。
1.2.2 imu_callback
其中imu_callback中订阅imu信息,并将器填充到accBuf和gyrBuf中,之后执行了vins_estimator/src/estimator/estimator.cpp中inputIMU函数的fastPredictIMU、pubLatestOdometry函数
fastPredictIMU使用上一时刻的姿态进行快速的imu预积分,这个信息根据processIMU的最新数据Ps[frame_count]、Rs[frame_count]、Vs[frame_count]、Bas[frame_count]、Bgs[frame_count]来进行预积分,从而保证信息能够正常发布。
// 使用上一时刻的姿态进行快速的imu预积分
// 用来预测最新P,V,Q的姿态
// -latest_p,latest_q,latest_v,latest_acc_0,latest_gyr_0 最新时刻的姿态。这个的作用是为了刷新姿态的输出,但是这个值的误差相对会比较大,是未经过非线性优化获取的初始值。
void Estimator::fastPredictIMU(double t, Eigen::Vector3d linear_acceleration, Eigen::Vector3d angular_velocity)
- 1
- 2
- 3
- 4
其中latest_Ba、latest_Bb是在预积分处就已经计算完毕的
// 其中包含了检测关键帧,估计外部参数,初始化,状态估计,划窗等等。
/**
* 处理一帧图像特征
* 1、提取前一帧与当前帧的匹配点
* 2、在线标定外参旋转
* 利用两帧之间的Camera旋转和IMU积分旋转,构建最小二乘问题,SVD求解外参旋转
* 1) Camera系,两帧匹配点计算本质矩阵E,分解得到四个解,根据三角化成功点比例确定最终正确解R、t,得到两帧之间的旋转R
* 2) IMU系,积分计算两帧之间的旋转
* 3) 根据旋转构建最小二乘问题,SVD求解外参旋转
* 3、系统初始化
* 4、3d-2d Pnp求解当前帧位姿
* 5、三角化当前帧特征点
* 6、滑窗执行Ceres优化,边缘化,更新滑窗内图像帧的状态(位姿、速度、偏置、外参、逆深度、相机与IMU时差)
* 7、剔除outlier点
* 8、用当前帧与前一帧位姿变换,估计下一帧位姿,初始化下一帧特征点的位置
* 9、移动滑窗,更新特征点的观测帧集合、观测帧索引(在滑窗中的位置)、首帧观测帧和深度值,删除没有观测帧的特征点
* 10、删除优化后深度值为负的特征点
* @param image 图像帧特征
* @param header 时间戳
*/
void Estimator::processImage
(const map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> &image, const double header)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
经过fastPredictIMU函数后我们可以拿到latest_P, latest_Q, latest_V三个变量,之后即可通过pubLatestOdometry广播odom信息
//构建一个odometry的msg并发布
void pubLatestOdometry(const Eigen::Vector3d &P, const Eigen::Quaterniond &Q, const Eigen::Vector3d &V, double t)
- 1
- 2
1.2.3 feature_callback
feature_callback的作用是获取点云数据,之后填充featureFrame,并把featureFrame通过inputFeature输入到estimator,且填充了featureBuf
/**
* 订阅一帧跟踪的特征点,包括3D坐标、像素坐标、速度,交给estimator处理
*/
void feature_callback(const sensor_msgs::PointCloudConstPtr &feature_msg)
{
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> featureFrame;
for (unsigned int i = 0; i < feature_msg->points.size(); i++)
{
int feature_id = feature_msg->channels[0].values[i];
int camera_id = feature_msg->channels[1].values[i];
double x = feature_msg->points[i].x;
double y = feature_msg->points[i].y;
double z = feature_msg->points[i].z;
double p_u = feature_msg->channels[2].values[i];
double p_v = feature_msg->channels[3].values[i];
double velocity_x = feature_msg->channels[4].values[i];
double velocity_y = feature_msg->channels[5].values[i];
if(feature_msg->channels.size() > 5)
{
double gx = feature_msg->channels[6].values[i];
double gy = feature_msg->channels[7].values[i];
double gz = feature_msg->channels[8].values[i];
pts_gt[feature_id] = Eigen::Vector3d(gx, gy, gz);
//printf("receive pts gt %d %f %f %f\n", feature_id, gx, gy, gz);
}
ROS_ASSERT(z == 1);
Eigen::Matrix<double, 7, 1> xyz_uv_velocity;
xyz_uv_velocity << x, y, z, p_u, p_v, velocity_x, velocity_y;
featureFrame[feature_id].emplace_back(camera_id, xyz_uv_velocity);
}
double t = feature_msg->header.stamp.toSec();
estimator.inputFeature(t, featureFrame);
return;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
1.2.4 sync_process
之后通过
// 从两个图像队列中取出最早的一帧,并从队列删除,双目要求两帧时差不得超过0.003s
std::thread sync_thread{sync_process}; //创建sync_thread线程,指向sync_process,这里边处理了measurementpross的线程
- 1
- 2
进入sync_process进行处理
/**
* 从两个图像队列中取出最早的一帧,并从队列删除,双目要求两帧时差不得超过0.003s
*/
void sync_process()
{
while(1)
{
if(STEREO)
{
cv::Mat image0, image1;
std_msgs::Header header;
double time = 0;
m_buf.lock();
if (!img0_buf.empty() && !img1_buf.empty())
{
double time0 = img0_buf.front()->header.stamp.toSec();
double time1 = img1_buf.front()->header.stamp.toSec();
// 双目相机左右图像时差不得超过0.003s
if(time0 < time1 - 0.003)
{
img0_buf.pop();
printf("throw img0\n");
}
else if(time0 > time1 + 0.003)
{
img1_buf.pop();
printf("throw img1\n");
}
else
{
// 提取缓存队列中最早一帧图像,并从队列中删除
time = img0_buf.front()->header.stamp.toSec();
header = img0_buf.front()->header;
image0 = getImageFromMsg(img0_buf.front());
img0_buf.pop();
image1 = getImageFromMsg(img1_buf.front());
img1_buf.pop();
}
}
m_buf.unlock();
if(!image0.empty())
estimator.inputImage(time, image0, image1);
}
else
{
cv::Mat image;
std_msgs::Header header;
double time = 0;
m_buf.lock();
if(!img0_buf.empty())
{
time = img0_buf.front()->header.stamp.toSec();
header = img0_buf.front()->header;
image = getImageFromMsg(img0_buf.front());
img0_buf.pop();
}
m_buf.unlock();
if(!image.empty())
estimator.inputImage(time, image);
}
std::chrono::milliseconds dura(2);
std::this_thread::sleep_for(dura);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
该函数中,首先对是否双目进行判断。
如果是双目,需要检测同步问题。对双目的时间进行判断,时间间隔小于0.003s的话则使用getImageFromMsg将其输入到image0和image1变量之中。之后estimator.inputImage。
如果是单目,则直接estimator.inputImage
2. 图像输入estimator.cpp
2.1 inputImage
/**
* 输入一帧图像
* 1、featureTracker,提取当前帧特征点
* 2、添加一帧特征点,processMeasurements处理
*/
void Estimator::inputImage(double t, const cv::Mat &_img, const cv::Mat &_img1)
{
inputImageCnt++;
// 特征点id,(x,y,z,pu,pv,vx,vy)
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> featureFrame;
TicToc featureTrackerTime;
/**
* 跟踪一帧图像,提取当前帧特征点
* 1、用前一帧运动估计特征点在当前帧中的位置,如果特征点没有速度,就直接用前一帧该点位置
* 2、LK光流跟踪前一帧的特征点,正反向,删除跟丢的点;如果是双目,进行左右匹配,只删右目跟丢的特征点
* 3、对于前后帧用LK光流跟踪到的匹配特征点,计算基础矩阵,用极线约束进一步剔除outlier点(代码注释掉了)
* 4、如果特征点不够,剩余的用角点来凑;更新特征点跟踪次数
* 5、计算特征点归一化相机平面坐标,并计算相对与前一帧移动速度
* 6、保存当前帧特征点数据(归一化相机平面坐标,像素坐标,归一化相机平面移动速度)
* 7、展示,左图特征点用颜色区分跟踪次数(红色少,蓝色多),画个箭头指向前一帧特征点位置,如果是双目,右图画个绿色点
*/
if(_img1.empty())
featureFrame = featureTracker.trackImage(t, _img);
else
featureFrame = featureTracker.trackImage(t, _img, _img1);
//printf("featureTracker time: %f\n", featureTrackerTime.toc());
// 发布跟踪图像
if (SHOW_TRACK)
{
cv::Mat imgTrack = featureTracker.getTrackImage();
pubTrackImage(imgTrack, t);
}
// 添加一帧特征点,处理
if(MULTIPLE_THREAD)
{
if(inputImageCnt % 2 == 0)
{
mBuf.lock();
featureBuf.push(make_pair(t, featureFrame));
mBuf.unlock();
}
}
else
{
mBuf.lock();
featureBuf.push(make_pair(t, featureFrame));
mBuf.unlock();
TicToc processTime;
processMeasurements();
printf("process time: %f\n", processTime.toc());
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
当中需要先设置参数,并开启processMeasurements线程
setParameter();
- 1
然后追踪图像上的特征trackImage,之后会进行详解,其中得到了featureFrame
if(_img1.empty())
featureFrame = featureTracker.trackImage(t, _img);// 追踪单目
else
featureFrame = featureTracker.trackImage(t, _img, _img1);// 追踪双目
- 1
- 2
- 3
- 4
然后,getTrackImage对特征到跟踪的图像进行一些处理。并把追踪的图片imgTrack发布出去.
if (SHOW_TRACK)//这个应该是展示轨迹
{
cv::Mat imgTrack = featureTracker.getTrackImage();
pubTrackImage(imgTrack, t);
}
- 1
- 2
- 3
- 4
- 5
然后,填充featureBuf
最后执行processMeasurements,这是处理全部量测的线程,IMU的预积分,特征点的处理等等都在这里进行.
2.2 trackImage
根据2.1的讲述,我们发现当中用到了trackImage这个函数,这个函数在
vins_estimator/src/featureTracker/feature_tracker.cpp
/**
* 跟踪一帧图像,提取当前帧特征点
* 1、用前一帧运动估计特征点在当前帧中的位置
* 2、LK光流跟踪前一帧的特征点,正反向,删除跟丢的点;如果是双目,进行左右匹配,只删右目跟丢的特征点
* 3、对于前后帧用LK光流跟踪到的匹配特征点,计算基础矩阵,用极线约束进一步剔除outlier点(代码注释掉了)
* 4、如果特征点不够,剩余的用角点来凑;更新特征点跟踪次数
* 5、计算特征点归一化相机平面坐标,并计算相对与前一帧移动速度
* 6、保存当前帧特征点数据(归一化相机平面坐标,像素坐标,归一化相机平面移动速度)
* 7、展示,左图特征点用颜色区分跟踪次数(红色少,蓝色多),画个箭头指向前一帧特征点位置,如果是双目,右图画个绿色点
*/
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> FeatureTracker::trackImage(double _cur_time, const cv::Mat &_img, const cv::Mat &_img1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
图像处理可以添加图像处理的部分,比如直方图均衡等等方法。
{
cv::Ptr<cv::CLAHE> clahe = cv::createCLAHE(3.0, cv::Size(8, 8));//createCLAHE 直方图均衡
clahe->apply(cur_img, cur_img);
if(!rightImg.empty())
clahe->apply(rightImg, rightImg);
}
- 1
- 2
- 3
- 4
- 5
- 6
2.2.1 hasPrediction
会对上一帧的特征点进行处理,计算出上一帧运动估计特征点在当前帧中的位置。对于前后帧用LK光流跟踪到的匹配特征点,计算基础矩。
if(hasPrediction)
{
cur_pts = predict_pts;
// LK光流跟踪两帧图像特征点,金字塔为1层
cv::calcOpticalFlowPyrLK(prev_img, cur_img, prev_pts, cur_pts, status, err, cv::Size(21, 21), 1,
cv::TermCriteria(cv::TermCriteria::COUNT+cv::TermCriteria::EPS, 30, 0.01), cv::OPTFLOW_USE_INITIAL_FLOW);
// 跟踪到的特征点数量
int succ_num = 0;
for (size_t i = 0; i < status.size(); i++)
{
if (status[i])
succ_num++;
}
// 特征点太少,金字塔调整为3层,再跟踪一次
if (succ_num < 10)
cv::calcOpticalFlowPyrLK(prev_img, cur_img, prev_pts, cur_pts, status, err, cv::Size(21, 21), 3);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
2.2.2 if(SHOW_TRACK)
画出追踪情况,就是在图像上的特征点位置出画圈圈,如果是双目的话就连线。
// 展示,左图特征点用颜色区分跟踪次数(红色少,蓝色多),画个箭头指向前一帧特征点位置,如果是双目,右图画个绿色点
if(SHOW_TRACK)
drawTrack(cur_img, rightImg, ids, cur_pts, cur_right_pts, prevLeftPtsMap);
- 1
- 2
- 3
2.2.3 setMask
在已跟踪到角点的位置上,将mask对应位置上设为0,
意为在cv::goodFeaturesToTrack(forw_img, n_pts, MAX_CNT - forw_pts.size(), 0.01, MIN_DIST, mask);
进行操作时在该点不再重复进行角点检测,这样可以使角点分布更加均匀
具体详情见开源的注释代码。
/**
* 特征点画个圈(半径MIN_DIST)存mask图,同时特征点集合按跟踪次数从大到小重排序
*/
void FeatureTracker::setMask()
- 1
- 2
- 3
- 4
2.2.4 goodFeaturesToTrack
如果当前图像的特征点cur_pts数目小于规定的最大特征点数目MAX_CNT,则进行提取。
提取使用的cv::goodFeaturesToTrack。将点保存到n_pts
/* goodFeaturesToTrack
_image:8位或32位浮点型输入图像,单通道
_corners:保存检测出的角点
maxCorners:角点数目最大值,如果实际检测的角点超过此值,则只返回前maxCorners个强角点
qualityLevel:角点的品质因子
minDistance:对于初选出的角点而言,如果在其周围minDistance范围内存在其他更强角点,则将此角点删除
_mask:指定感兴趣区,如不需在整幅图上寻找角点,则用此参数指定ROI
blockSize:计算协方差矩阵时的窗口大小
useHarrisDetector:指示是否使用Harris角点检测,如不指定,则计算shi-tomasi角点
harrisK:Harris角点检测需要的k值 */
cv::goodFeaturesToTrack(cur_img, n_pts, MAX_CNT - cur_pts.size(), 0.01, MIN_DIST, mask);
// mask 这里肯定是指定感兴趣区,如不需在整幅图上寻找角点,则用此参数指定ROI
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
之后将n_pts保存到cur_pts之中
2.2.5 undistortedPts
将像素座标系下的座标,转换为归一化相机座标系下的座标 即un_pts为归一化相机座标系下的座标。
/**
* 像素点计算归一化相机平面点,带畸变校正
*/
vector<cv::Point2f> FeatureTracker::undistortedPts(vector<cv::Point2f> &pts, camodocal::CameraPtr cam)
{
vector<cv::Point2f> un_pts;
for (unsigned int i = 0; i < pts.size(); i++)
{
// 特征点像素坐标
Eigen::Vector2d a(pts[i].x, pts[i].y);
Eigen::Vector3d b;
// 像素点计算归一化相机平面点,带畸变校正
cam->liftProjective(a, b);
// 归一化相机平面点
un_pts.push_back(cv::Point2f(b.x() / b.z(), b.y() / b.z()));
}
return un_pts;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
2.2.6 cam->liftProjective(a, b);
这个函数是对鱼眼相机模型的标定及去畸变过程
/**
* \brief Lifts a point from the image plane to its projective ray
* \param p image coordinates
* \param P coordinates of the projective ray
* 这个函数是对鱼眼相机模型的标定及去畸变过程
*/
void
PinholeCamera::liftProjective(const Eigen::Vector2d& p, Eigen::Vector3d& P) const
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
之后通过ptsVelocity计算当前帧相对于前一帧 特征点沿x,y方向的像素移动速度
/**
* 计算当前帧归一化相机平面特征点在x、y方向上的移动速度
* @param pts 当前帧归一化相机平面特征点
*/
vector<cv::Point2f> FeatureTracker::ptsVelocity(vector<int> &ids, vector<cv::Point2f> &pts,
map<int, cv::Point2f> &cur_id_pts, map<int, cv::Point2f> &prev_id_pts)
{
vector<cv::Point2f> pts_velocity;
cur_id_pts.clear();
for (unsigned int i = 0; i < ids.size(); i++)
{
cur_id_pts.insert(make_pair(ids[i], pts[i]));
}
// caculate points velocity
if (!prev_id_pts.empty())
{
double dt = cur_time - prev_time;
// 遍历当前帧归一化相机平面特征点
for (unsigned int i = 0; i < pts.size(); i++)
{
std::map<int, cv::Point2f>::iterator it;
it = prev_id_pts.find(ids[i]);
if (it != prev_id_pts.end())
{
// 计算点在归一化相机平面上x、y方向的移动速度
double v_x = (pts[i].x - it->second.x) / dt;
double v_y = (pts[i].y - it->second.y) / dt;
pts_velocity.push_back(cv::Point2f(v_x, v_y));
}
else
pts_velocity.push_back(cv::Point2f(0, 0));
}
}
else
{
for (unsigned int i = 0; i < cur_pts.size(); i++)
{
pts_velocity.push_back(cv::Point2f(0, 0));
}
}
return pts_velocity;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
2.3 双目摄像头
如果是双目相机,那么在右目上追踪左目的特征点。使用的函数是calcOpticalFlowPyrLK
/*光流跟踪是在左右两幅图像之间进行cur left ---- cur right
prevImg 第一幅8位输入图像 或 由buildOpticalFlowPyramid()构造的金字塔。
nextImg 第二幅与preImg大小和类型相同的输入图像或金字塔。
prevPts 光流法需要找到的二维点的vector。点坐标必须是单精度浮点数。
nextPts 可以作为输入,也可以作为输出。包含输入特征在第二幅图像中计算出的新位置的二维点(单精度浮点坐标)的输出vector。当使用OPTFLOW_USE_INITIAL_FLOW 标志时,nextPts的vector必须与input的大小相同。
status 输出状态vector(类型:unsigned chars)。如果找到了对应特征的流,则将向量的每个元素设置为1;否则,置0。
err 误差输出vector。vector的每个元素被设置为对应特征的误差,可以在flags参数中设置误差度量的类型;如果没有找到流,则未定义误差(使用status参数来查找此类情况)。
winSize 每级金字塔的搜索窗口大小。
maxLevel 基于最大金字塔层次数。如果设置为0,则不使用金字塔(单级);如果设置为1,则使用两个级别,等等。如果金字塔被传递到input,那么算法使用的级别与金字塔同级别但不大于MaxLevel。
criteria 指定迭代搜索算法的终止准则(在指定的最大迭代次数标准值(criteria.maxCount)之后,或者当搜索窗口移动小于criteria.epsilon。)
flags 操作标志,可选参数:
OPTFLOW_USE_INITIAL_FLOW:使用初始估计,存储在nextPts中;如果未设置标志,则将prevPts复制到nextPts并被视为初始估计。
OPTFLOW_LK_GET_MIN_EIGENVALS:使用最小本征值作为误差度量(见minEigThreshold描述);如果未设置标志,则将原始周围的一小部分和移动的点之间的 L1 距离除以窗口中的像素数,作为误差度量。
minEigThreshold
算法所计算的光流方程的2x2标准矩阵的最小本征值(该矩阵称为[Bouguet00]中的空间梯度矩阵)÷ 窗口中的像素数。如果该值小于MinEigThreshold,则过滤掉相应的特征,相应的流也不进行处理。因此可以移除不好的点并提升性能。 */
cv::calcOpticalFlowPyrLK(cur_img, rightImg, cur_pts, cur_right_pts, status, err, cv::Size(21, 21), 3);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
2.3.1 if(FLOW_BACK)
如果这个打开,就想前边的左右目图像的位置换一下,在进行一次特征跟踪,目的是反向跟踪,得到左右目都匹配到的点
// 反向LK光流计算一次
if(FLOW_BACK)
{
vector<uchar> reverse_status;
vector<cv::Point2f> reverse_pts = prev_pts;
cv::calcOpticalFlowPyrLK(cur_img, prev_img, cur_pts, reverse_pts, reverse_status, err, cv::Size(21, 21), 1,
cv::TermCriteria(cv::TermCriteria::COUNT+cv::TermCriteria::EPS, 30, 0.01), cv::OPTFLOW_USE_INITIAL_FLOW);
//cv::calcOpticalFlowPyrLK(cur_img, prev_img, cur_pts, reverse_pts, reverse_status, err, cv::Size(21, 21), 3);
// 正向、反向都匹配到了,且用正向匹配点反向匹配回来,与原始点距离不超过0.5个像素,认为跟踪到了
for(size_t i = 0; i < status.size(); i++)
{
if(status[i] && reverse_status[i] && distance(prev_pts[i], reverse_pts[i]) <= 0.5)
{
status[i] = 1;
}
else
status[i] = 0;
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
之后和单目一样执行undistortedPts 和 ptsVelocity
2.3.2 制作featureFrame
// 添加当前帧特征点(归一化相机平面坐标,像素坐标,归一化相机平面移动速度)
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> featureFrame;
- 1
- 2
其中,camera_id = 0为左目上的点,camera_id = 1,为右目上的点。
3 IMU处理estimator.cpp
3.1 判断IMU数据是否可用
if ((!USE_IMU || IMUAvailable(feature.first + td)))//如果不用imu或者超时
- 1
其中
// 判断输入的时间t时候的imu是否可用
bool Estimator::IMUAvailable(double t)
- 1
- 2
3.2 获得accVector和gyrVector
对imu的时间进行判断,讲队列里的imu数据放入到accVector和gyrVector中
// 对imu的时间进行判断,讲队列里的imu数据放入到accVector和gyrVector中,完成之后返回true
bool Estimator::getIMUInterval(double t0, double t1, vector<pair<double, Eigen::Vector3d>> &accVector,
vector<pair<double, Eigen::Vector3d>> &gyrVector)
- 1
- 2
- 3
3.3 初始化IMU的姿态
initFirstIMUPose,其实很简单,就是求一个姿态角,然后把航向角设为0
//第一帧IMU姿态初始化
// 用初始时刻加速度方向对齐重力加速度方向,得到一个旋转,使得初始IMU的z轴指向重力加速度方向
void Estimator::initFirstIMUPose(vector<pair<double, Eigen::Vector3d>> &accVector)
- 1
- 2
- 3
3.4 处理IMU数据,运行processIMU
/**
* 处理一帧IMU,积分
* 用前一图像帧位姿,前一图像帧与当前图像帧之间的IMU数据,积分计算得到当前图像帧位姿
* Rs,Ps,Vs
* @param t 当前时刻
* @param dt 与前一帧时间间隔
* @param linear_acceleration 当前时刻加速度
* @param angular_velocity 当前时刻角速度
*/
void Estimator::processIMU(double t, double dt, const Vector3d &linear_acceleration, const Vector3d &angular_velocity)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
其中frame_count是值窗内的第几帧图像
下边是新建一个预积分项目
pre_integrations[frame_count] = new IntegrationBase{acc_0, gyr_0, Bas[frame_count], Bgs[frame_count]};
- 1
预积分
pre_integrations[frame_count]->push_back(dt, linear_acceleration, angular_velocity);
// push_back重载的时候就已经进行了预积分
- 1
- 2
其中的push_back
void push_back(double dt, const Eigen::Vector3d &acc, const Eigen::Vector3d &gyr)
{
dt_buf.push_back(dt);
acc_buf.push_back(acc);
gyr_buf.push_back(gyr);
propagate(dt, acc, gyr);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
其中的propagate
// IMU预积分传播方程
// 积分计算两个关键帧之间IMU测量的变化量
// 同时维护更新预积分的Jacobian和Covariance,计算优化时必要的参数
/**
* IMU中值积分传播
* 1、前一时刻状态计算当前时刻状态,PVQ,Ba,Bg
* 2、计算当前时刻的误差Jacobian,误差协方差 todo
*/
void propagate(double _dt, const Eigen::Vector3d &_acc_1, const Eigen::Vector3d &_gyr_1)
{
dt = _dt;
acc_1 = _acc_1;
gyr_1 = _gyr_1;
Vector3d result_delta_p;
Quaterniond result_delta_q;
Vector3d result_delta_v;
Vector3d result_linearized_ba;
Vector3d result_linearized_bg;
/**
* 中值积分
* 1、前一时刻状态计算当前时刻状态,PVQ,其中Ba,Bg保持不变
* 2、计算当前时刻的误差Jacobian,误差协方差 todo
*/
midPointIntegration(_dt, acc_0, gyr_0, _acc_1, _gyr_1, delta_p, delta_q, delta_v,
linearized_ba, linearized_bg,
result_delta_p, result_delta_q, result_delta_v,
result_linearized_ba, result_linearized_bg, 1);
//checkJacobian(_dt, acc_0, gyr_0, acc_1, gyr_1, delta_p, delta_q, delta_v,
// linearized_ba, linearized_bg);
delta_p = result_delta_p;
delta_q = result_delta_q;
delta_v = result_delta_v;
linearized_ba = result_linearized_ba;
linearized_bg = result_linearized_bg;
delta_q.normalize();
sum_dt += dt;
acc_0 = acc_1;
gyr_0 = gyr_1;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
其中的midPointIntegration.这里边就涉及到了IMU的传播方针和协方差矩阵.雅克比矩阵等等.哪里不懂可以VIO的理论知识。
// 中值积分递推Jacobian和Covariance
// _acc_0上次测量加速度 _acc_1本次测量加速度 delta_p上一次的位移 result_delta_p位置变化量计算结果 update_jacobian是否更新雅克比基本方法就涉及到了IMU的创博方针和器方差矩阵的窗哦sdf
void midPointIntegration(double _dt,
const Eigen::Vector3d &_acc_0, const Eigen::Vector3d &_gyr_0,
const Eigen::Vector3d &_acc_1, const Eigen::Vector3d &_gyr_1,
const Eigen::Vector3d &delta_p, const Eigen::Quaterniond &delta_q, const Eigen::Vector3d &delta_v,
const Eigen::Vector3d &linearized_ba, const Eigen::Vector3d &linearized_bg,
Eigen::Vector3d &result_delta_p, Eigen::Quaterniond &result_delta_q, Eigen::Vector3d &result_delta_v,
Eigen::Vector3d &result_linearized_ba, Eigen::Vector3d &result_linearized_bg, bool update_jacobian)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
之后计算对应绝对坐标系下的位置等
// Rs Ps Vs是frame_count这一个图像帧开始的预积分值,是在绝对坐标系下的.
int j = frame_count;
Vector3d un_acc_0 = Rs[j] * (acc_0 - Bas[j]) - g;//移除了偏执的加速度
Vector3d un_gyr = 0.5 * (gyr_0 + angular_velocity) - Bgs[j];//移除了偏执的gyro
Rs[j] *= Utility::deltaQ(un_gyr * dt).toRotationMatrix();
Vector3d un_acc_1 = Rs[j] * (linear_acceleration - Bas[j]) - g;
Vector3d un_acc = 0.5 * (un_acc_0 + un_acc_1);
Ps[j] += dt * Vs[j] + 0.5 * dt * dt * un_acc;
Vs[j] += dt * un_acc;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
4. 图像处理estimator.cpp
4.1 processImage
函数入口processMeasurements中的processImage(feature.second, feature.first);输入的之后关键帧和时间
/* addFeatureCheckParallax
对当前帧与之前帧进行视差比较,如果是当前帧变化很小,就会删去倒数第二帧,如果变化很大,就删去最旧的帧。并把这一帧作为新的关键帧
这样也就保证了划窗内优化的,除了最后一帧可能不是关键帧外,其余的都是关键帧
VINS里为了控制优化计算量,在实时情况下,只对当前帧之前某一部分帧进行优化,而不是全部历史帧。局部优化帧的数量就是窗口大小。
为了维持窗口大小,需要去除旧的帧添加新的帧,也就是边缘化 Marginalization。到底是删去最旧的帧(MARGIN_OLD)还是删去刚
刚进来窗口倒数第二帧(MARGIN_SECOND_NEW)
如果大于最小像素,则返回true */
/**
* 添加特征点记录,并检查当前帧是否为关键帧
* @param frame_count 当前帧在滑窗中的索引
* @param image 当前帧特征(featureId,cameraId,feature)
*/
bool FeatureManager::addFeatureCheckParallax(int frame_count, const map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> &image, double td)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
判断之后,确定marg掉那个帧
// 检测关键帧
if (f_manager.addFeatureCheckParallax(frame_count, image, td))
{
marginalization_flag = MARGIN_OLD;//新一阵将被作为关键帧!
//printf("keyframe\n");
}
else
{
marginalization_flag = MARGIN_SECOND_NEW;
//printf("non-keyframe\n");
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
4.2 估计相机和IMU的外参
// 当前帧预积分(前一帧与当前帧之间的IMU预积分)
imageframe.pre_integration = tmp_pre_integration;
all_image_frame.insert(make_pair(header, imageframe));
// 重置预积分器
tmp_pre_integration = new IntegrationBase{acc_0, gyr_0, Bas[frame_count], Bgs[frame_count]};
// 估计一个外部参,并把ESTIMATE_EXTRINSIC置1,输出ric和RIC
if(ESTIMATE_EXTRINSIC == 2)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
首先找到对应的图像
vector<pair<Vector3d, Vector3d>> corres = f_manager.getCorresponding(frame_count - 1, frame_count);
// 这个里边放的是新图像和上一帧
- 1
- 2
使用CalibrationExRotation计算参数
/* CalibrationExRotation
当外参完全不知道的时候,可以在线对其进行初步估计,然后在后续优化时,会在optimize函数中再次优化。
输入是新图像和上一阵图像的位姿 和二者之间的imu预积分值,输出旋转矩阵
对应VIO课程第七讲中对外参矩阵的求解 */
bool InitialEXRotation::CalibrationExRotation(vector<pair<Vector3d, Vector3d>> corres, Quaterniond delta_q_imu, Matrix3d &calib_ric_result)
- 1
- 2
- 3
- 4
- 5
4.3 如果没有初始化,那么就先进行初始化
4.3.1 单目+IMU的初始化
// monocular + IMU initilization
// 单目+IMU系统初始化
if (!STEREO && USE_IMU)
{
// 要求滑窗满
if (frame_count == WINDOW_SIZE)
{
bool result = false;
// 如果上次初始化没有成功,要求间隔0.1s
if(ESTIMATE_EXTRINSIC != 2 && (header - initial_timestamp) > 0.1)
{
/**
* todo
* 系统初始化
* 1、计算滑窗内IMU加速度的标准差,用于判断移动快慢
* 2、在滑窗中找到与当前帧具有足够大的视差,同时匹配较为准确的一帧,计算相对位姿变换
* 1) 提取滑窗中每帧与当前帧之间的匹配点(要求点在两帧之间一直被跟踪到,属于稳定共视点),超过20个则计算视差
* 2) 两帧匹配点计算本质矩阵E,恢复R、t
* 3) 视差超过30像素,匹配内点数超过12个,则认为符合要求,返回当前帧
* 3、以上面找到的这一帧为参考系,Pnp计算滑窗每帧位姿,然后三角化所有特征点,构建BA(最小化点三角化前后误差)优化每帧位姿
* 1) 3d-2d Pnp求解每帧位姿
* 2) 对每帧与l帧、当前帧三角化
* 3) 构建BA,最小化点三角化前后误差,优化每帧位姿
* 4) 保存三角化点
* 4、对滑窗中所有帧执行Pnp优化位姿
* 5、Camera与IMU初始化,零偏、尺度、重力方向
*/
result = initialStructure();
initial_timestamp = header;
}
if(result)
{
// 滑窗执行Ceres优化,边缘化,更新滑窗内图像帧的状态(位姿、速度、偏置、外参、逆深度、相机与IMU时差)
optimization();
// 用优化后的当前帧位姿更新IMU积分的基础位姿,用于展示IMU轨迹
updateLatestStates();
solver_flag = NON_LINEAR;
// 移动滑窗,更新特征点的观测帧集合、观测帧索引(在滑窗中的位置)、首帧观测帧和深度值,删除没有观测帧的特征点
slideWindow();
ROS_INFO("Initialization finish!");
}
else
// 移动滑窗,更新特征点的观测帧集合、观测帧索引(在滑窗中的位置)、首帧观测帧和深度值,删除没有观测帧的特征点
slideWindow();
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
其中的initialStructure还含有很多函数.
// 视觉和惯性的对其,对应https://mp.weixin.qq.com/s/9twYJMOE8oydAzqND0UmFw中的visualInitialAlign
/* visualInitialAlign
很具VIO课程第七讲:一共分为5步:
1估计旋转外参. 2估计陀螺仪bias 3估计中立方向,速度.尺度初始值 4对重力加速度进一步优化 5将轨迹对其到世界坐标系 */
bool Estimator::visualInitialAlign()
// 视觉IMu的对其
bool VisualIMUAlignment(map<double, ImageFrame> &all_image_frame, Vector3d* Bgs, Vector3d &g, VectorXd &x)
// 更新得到新的陀螺仪漂移Bgs
// 对应视觉IMU对其的第二部分
// 对应https://mp.weixin.qq.com/s/9twYJMOE8oydAzqND0UmFw中的公式31-34
void solveGyroscopeBias(map<double, ImageFrame> &all_image_frame, Vector3d* Bgs)
// 初始化速度、重力和尺度因子
// 对应 https://mp.weixin.qq.com/s/9twYJMOE8oydAzqND0UmFw 中的公式34-36
bool LinearAlignment(map<double, ImageFrame> &all_image_frame, Vector3d &g, VectorXd &x)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
成功初始化之后则执行,optimization()、 updateLatestStates() 、slideWindow()
if(result)//如果初始化成功
{
optimization();//先进行一次滑动窗口非线性优化,得到当前帧与第一帧的位姿
updateLatestStates();
solver_flag = NON_LINEAR;
slideWindow();//滑动窗口
ROS_INFO("Initialization finish!");
}
else//滑掉这一窗
slideWindow();
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
updateLatestStates() 和slideWindow()这两个函数比较简单
// 让此时刻的值都等于上一时刻的值,用来更新状态
void Estimator::updateLatestStates()
// 滑动窗口法
void Estimator::slideWindow()
// 道理很简单,就是把前后元素交换
- 1
- 2
- 3
- 4
- 5
- 6
optimization()为基于滑动窗口的紧耦合的非线性优化,残差项的构造和求解
/**
* 滑窗执行Ceres优化,边缘化,更新滑窗内图像帧的状态(位姿、速度、偏置、外参、逆深度、相机与IMU时差)
*/
void Estimator::optimization()
- 1
- 2
- 3
- 4
4.3.2 双目+IMU初始化
// stereo + IMU initilization
if(STEREO && USE_IMU)
- 1
- 2
求解深度
// 双目三角化
// 结果放入了feature的estimated_depth中
void FeatureManager::triangulate(int frameCnt, Vector3d Ps[], Matrix3d Rs[], Vector3d tic[], Matrix3d ric[])
// 利用svd方法对双目进行三角化
void FeatureManager::triangulatePoint(Eigen::Matrix<double, 3, 4> &Pose0, Eigen::Matrix<double, 3, 4> &Pose1,
Eigen::Vector2d &point0, Eigen::Vector2d &point1, Eigen::Vector3d &point_3d)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
有了深度之后就可以进行PnP求解
// 有了深度,当下一帧照片来到以后就可以利用pnp求解位姿了
void FeatureManager::initFramePoseByPnP(int frameCnt, Vector3d Ps[], Matrix3d Rs[], Vector3d tic[], Matrix3d ric[])
- 1
- 2
之后求解陀螺仪的偏执,并对IMU预积分值进行重新传播
solveGyroscopeBias(all_image_frame, Bgs);
// 对之前预积分得到的结果进行更新。
// 预积分的好处查看就在于你得到新的Bgs,不需要又重新再积分一遍,可以通过Bgs对位姿,速度的一阶导数,进行线性近似,得到新的Bgs求解出MU的最终结果。
for (int i = 0; i <= WINDOW_SIZE; i++)
{
pre_integrations[i]->repropagate(Vector3d::Zero(), Bgs[i]);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
进行优化
optimization();
updateLatestStates();
solver_flag = NON_LINEAR;
slideWindow();
- 1
- 2
- 3
- 4
其中的optimization()、 updateLatestStates()、 slideWindow()在下一篇博客进行讲解
4.3.3双目初始化
// stereo only initilization
if(STEREO && !USE_IMU)
{
f_manager.initFramePoseByPnP(frame_count, Ps, Rs, tic, ric);
f_manager.triangulate(frame_count, Ps, Rs, tic, ric);
optimization();
if(frame_count == WINDOW_SIZE)
{
optimization();
updateLatestStates();
solver_flag = NON_LINEAR;
slideWindow();
ROS_INFO("Initialization finish!");
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
5. 回环检测pose_graph_node.cpp
本节主要讲loop_fusion包的程序结构,loop_fusion主要作用:利用词袋模型进行图像的回环检测。在vinsmono中,该程序包处于pose_graph包内。vins_fusion与vins_mono一个差别在于,回环检测的点云数据在mono中有回调供给VIO进行非线性优化,而在fusion中,VIO估计完全独立于回环检测的结果。即回环检测的全局估计会受到VIO的影响,但是VIO不受全局估计的影响。(这个意思是fusion我们可以单独使用VIO部分)
5.1 程序入口
5.1读取配置文件
通过fsSetting进行相应的参数配置,其中比较重要的是读入了vocabulary_file,即在support_files里面的brief_k10L6.bin。以及BRIEF_PATTERN_FILE。通过posegraph.loadVocabulary为posegraph的类成员 BriefDatabase db设置属性以及BriefVocabulary voc赋值。以及为BRIEF_PATTERN_FILE赋值。为后期keyframe的构建创造一个基础。
cv::FileStorage fsSettings(config_file, cv::FileStorage::READ);
if(!fsSettings.isOpened())
{
std::cerr << "ERROR: Wrong path to settings" << std::endl;
}
cameraposevisual.setScale(0.1);
cameraposevisual.setLineWidth(0.01);
std::string IMAGE_TOPIC;
int LOAD_PREVIOUS_POSE_GRAPH;
ROW = fsSettings["image_height"];
COL = fsSettings["image_width"];
std::string pkg_path = ros::package::getPath("loop_fusion");
string vocabulary_file = pkg_path + "/../support_files/brief_k10L6.bin";
cout << "vocabulary_file" << vocabulary_file << endl;
posegraph.loadVocabulary(vocabulary_file);
BRIEF_PATTERN_FILE = pkg_path + "/../support_files/brief_pattern.yml";
cout << "BRIEF_PATTERN_FILE" << BRIEF_PATTERN_FILE << endl;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
5.1.2LOAD_PREVIOUS_POSE_GRAPH
即是否要加载原有的地图信息,如果加载了之前的信息,则posegraph.loadPoseGraph,之前所有的关键帧的序号sequence都设置为0,base_sequence也是0。不过不加载之前的信息,base_sequence=1。
if (LOAD_PREVIOUS_POSE_GRAPH)
{
printf("load pose graph\n");
m_process.lock();
posegraph.loadPoseGraph();
m_process.unlock();
printf("load pose graph finish\n");
load_flag = 1;
}
else
{
printf("no previous pose graph\n");
load_flag = 1;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
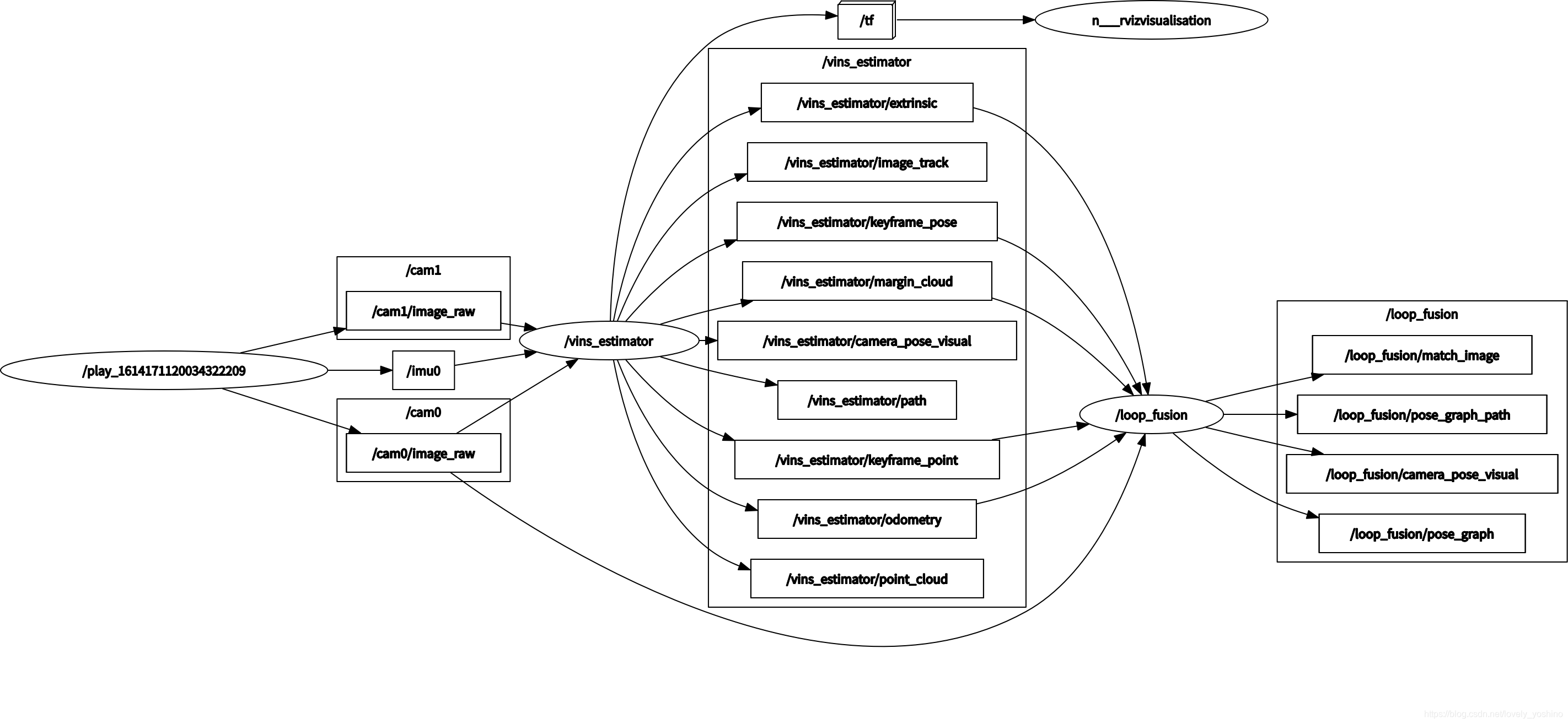
5.1.3 订阅话题,发布话题
// 订阅里程计
ros::Subscriber sub_vio = n.subscribe("/vins_estimator/odometry", 2000, vio_callback);
// 订阅图像
ros::Subscriber sub_image = n.subscribe(IMAGE_TOPIC, 2000, image_callback);
// 订阅关键帧位姿
ros::Subscriber sub_pose = n.subscribe("/vins_estimator/keyframe_pose", 2000, pose_callback);
// 订阅外参
ros::Subscriber sub_extrinsic = n.subscribe("/vins_estimator/extrinsic", 2000, extrinsic_callback);
// 订阅关键帧特征点
ros::Subscriber sub_point = n.subscribe("/vins_estimator/keyframe_point", 2000, point_callback);
//
ros::Subscriber sub_margin_point = n.subscribe("/vins_estimator/margin_cloud", 2000, margin_point_callback);
pub_match_img = n.advertise<sensor_msgs::Image>("match_image", 1000);
pub_camera_pose_visual = n.advertise<visualization_msgs::MarkerArray>("camera_pose_visual", 1000);
pub_point_cloud = n.advertise<sensor_msgs::PointCloud>("point_cloud_loop_rect", 1000);
pub_margin_cloud = n.advertise<sensor_msgs::PointCloud>("margin_cloud_loop_rect", 1000);
pub_odometry_rect = n.advertise<nav_msgs::Odometry>("odometry_rect", 1000);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
process && command
process主要的作用是开启一个新线程,这一块为程序的主要执行部分,我们下一节详细阐述。而command是开启一个控制台键盘控制线程。键盘控制输入,有提供两种选择,在控制台上写入:‘s’:把当前Posegraph存储起来,并且把整个loop_fusion包的进程关掉。‘n’:图像更新序列,new_sequence()。
void command()
{
while(1)
{
char c = getchar();
if (c == 's')
{
m_process.lock();
posegraph.savePoseGraph();
m_process.unlock();
printf("save pose graph finish\nyou can set 'load_previous_pose_graph' to 1 in the config file to reuse it next time\n");
printf("program shutting down...\n");
ros::shutdown();
}
if (c == 'n')
new_sequence();
std::chrono::milliseconds dura(5);
std::this_thread::sleep_for(dura);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21

