- 1Educational Codeforces Round 100 (Rated for Div. 2) 题解_you are given an array [a1,a2,…,an] such that 1≤ai
- 2win10系统安装docker (2022年最新填坑)_win10安装docker
- 3随机森林回归算法讲解
- 4Xcode手动安装iOS模拟器_中国x站下载
- 5OpenAI DALL·E 3文生图模型技术揭秘(建议收藏)_最新多模块图生文架构
- 6分类预测 | Matlab实现OOA-CNN-SVM鱼鹰算法优化卷积支持向量机分类预测
- 7BLIP论文笔记
- 8谷歌员工年薪中位数近190万元!科技公司年薪排行,哪家强?
- 9Delphi:文本朗读器--文本转语音(基于百度TTS语音库)_delphi百度语音
- 10[数据结构]-哈希
Apollo_ADS_路径规划1_道路中心线表示& 平滑_Reference Line Smoother_路径规划里面的平方积分
赞
踩
参考何为二次规划:
https://wenku.baidu.com/view/41788a34f61fb7360a4c6584.html
Must know:


我们有n 个点 (x,y), 在笛卡尔坐标系下 , 可以拟合一条曲线。Y关于X
同样的,如果在frenet frame 坐标下,ego的坐标(0,0),传感器 拍摄到 n 个车道中心线(曲线)的 坐标,一段一段, 采样时间也是固定的。 --不变道,这条参考线保持不变,在此基础上做后面的S-T , S-L 规划。
对于中心线, 先得到笛卡尔坐标下表示, x 关于 时间t, y 关于时间t, 2个多项式方程
以 车道线中心为参考坐标系。得到 frenet下 ego的坐标(station,lateral)s--arc 沿曲线走过的累计长度,l--横向的offset
随着时间的增加, ego 走过n个点,(s,l) 拟合成一条曲线(N次多项式-可以配置), L 关于S的方程. 这个就是ego 的行驶轨迹。--站点信息。(实际上就是X,Y的关系)
同样的 S-T frame 下得到, arc length (纵向位置)关于时间的函数,求微分就可以得到速度,加速,jerk -->得到不同时刻加速还是减速的信息。---完成速度profile 的定义
Reference Line Smoother---优化目标是曲线的Jerk
https://github.com/ApolloAuto/apollo/blob/master/docs/specs/reference_line_smoother.md
Quadratic programming(二次规划)) + Spline(样条曲线) interpolation
1. Objective function
1.1 Segment routing path 建立数学模型
Segment routing path into n segments. each segment trajectory is defined by two polynomials(多项式):
关于时间的多项式函数,x--纵向位置,y--横向位置 , t=0 ,得到初始点坐标,t=1,1s后的坐标,t=3,3s后的坐标 ...
v恒定时,t可以换成 v*t=arc length
求一次导数得到速度,二阶-加速度,三阶-jerk ...


1.2 Define objective function of optimization for each segment 定义目标函数
为什么定义这个形式?三阶导数 ,然后平方,得到的函数再求积分
只是cost 函数的定义方法,同数学里面的方差定义,平方以后可以让误差放大,更容易比较,(去除了符号的影响), jerk 平方后求累积值(积分)

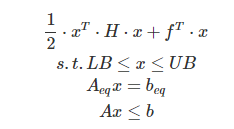
1.3 Convert the cost function to QP formulation
转换成二次规划的形式--规划问题,核心不是计算,而是如何建模。
QP formulation:
2 Constraints
2.1 Joint smoothness constraints 连接处的平顺性
This constraint smoothes the spline joint. Let's assume two segments, ![]() and
and  , are connected and the accumulated s of segment
, are connected and the accumulated s of segment ![]() is
is ![]() Calculate the constraint equation as:
Calculate the constraint equation as:
第一段的从时间t :0---t , arc length 变换 s0-sk (假设速度恒定,匀速圆周运动, t= s)
第二段一样,时间从0-t+1, arc length 变化:s0-sk+1
连接处2段曲线方程相交,对应的加速度,jerk etc.

时间都是从s0~sk, 坐标是k段的结束,右边是k+1段的开始。当然连接啦!
Similarly the formula works for the equality constraints, such as:

2.2 Sampled points for boundary constraint
采样点边界约束--路径肯定不可能横向无限宽,纵向无限长。
Evenly sample m points along the path and check the predefined boundaries at those points.