- 1springsecurity oauth2.0 springboot整合 spring security自定义登录页面5_springboot security oauth2 jwt 自己的login页面
- 2Docker Gitlab CI Runner 搭建和使用_gitlab runner 镜像注册
- 3pcie16x能插1x的卡嘛?_小白把这7个修复工具分享给你:不仅能修复U盘,SD卡、TF卡也能修复!...
- 4杂记 | Linux中修改docker默认访问端口(2375)_2375端口
- 5十分钟读懂Stable Diffusion运行原理_stable diffusion原理
- 6云计算 云原生
- 7Unity3D应用--打造Android车载3D车模桌面(车载主界面开发)_基于unity安卓车机
- 8Chrome 调试移动端webview页面_chrome mobile webview
- 9UE4 Shadow Casting_ue4 toomany overlapping shadowed movable lights sh
- 10在.net中读写config文件的各种方法
Unity-ROS与话题与服务(二)_unity3d发布ros信息
赞
踩
0. 简介
对于ROS而言,其最常用的就是Topic话题以及Service两个了。之前我们在了解Unity Robotics Hub时候就了解到基本的Unity和ROS的通讯,下面我们来详细介绍一下Unity与ROS的话题与服务。
ROS和Unity之间的通信是通过Unity的“ROS-TCP-Connector”软件包和ROS的“ROS-TCP-Endpoint”软件包进行通信的。
1. Unity与ROS链接
ROS方面的准备步骤如下,首先添加端口号“10000”“5005”,启动Docker镜像。
Unity和ROS之间的通信需要端口号“10000”“5005”。为了在Unity中导入消息文件,也进行文件夹的安装。
docker run -p 6080:80 -p 10000:10000 -p 5005:5005 --shm-size=1024m tiryoh/ros-desktop-vnc:melodic
- 1
安装“ROS-TCP-Endpoint”软件包,用于ROS程序与Unity通信
cd ~/catkin_ws/src
git clone https://github.com/Unity-Technologies/ROS-TCP-Endpoint
cd ..
catkin build
source ~/catkin_ws/devel/setup.bash
- 1
- 2
- 3
- 4
- 5
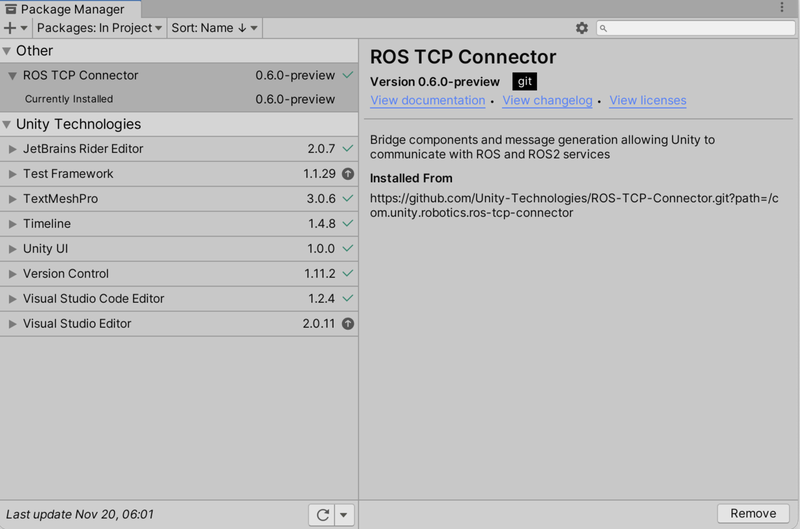
然后就是Unity端准备步骤如下,首先就是安装ROS-TCP-Connector。这需要确保Unity的版本在2020.2以上。然后在在Unity菜单“Window→Package Manager”中打开“Package Manager”,“+→Add Package from git URL…”中输入以下URL,按下“Add”按钮,然后我们就会看到ROS-TCP-Connector插件安装成功
https://github.com/Unity-Technologies/ROS-TCP-Connector.git?path=/com.unity.robotics.ros-tcp-connector
- 1
然后在Unity中完成对ROS的设置,首先选择Unity菜单“Robotics→ROS Settings”
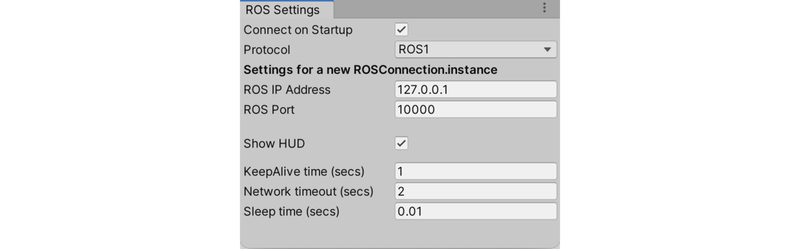
确认以下的设定是否正确
・Connect on Startup : True
・Protocol : ROS1
・ROS IP Address : 127.0.0.1
・ROS Port : 10000
・Show HUD : True
・KeepAlive time (secs):在指定秒数以上没有发送其他消息的情况下,频繁测试连接。这个时间越长,ROSConnection认识到Topic停止响应所花费的时间就越长。
・Network timeout (secs):消息发送超过指定秒数时,视为连接失败。这个时间越长,ROSConnection认识到Topic停止了响应所花费的时间就越长。
・Sleep time (secs):在确认新消息之前,睡眠的秒数。如果减少这个时间,响应会变快,但是会消耗更多的CPU。
2. 自定义msg
将消息导入Unity的步骤如下所示
-
Unity的菜单“Robotics→Generate ROS Messages…”选择。
-
在“ROS message path”中选择“catkin_ws/src”。
然后就可以看到path下的msg都会显示在Unity下面
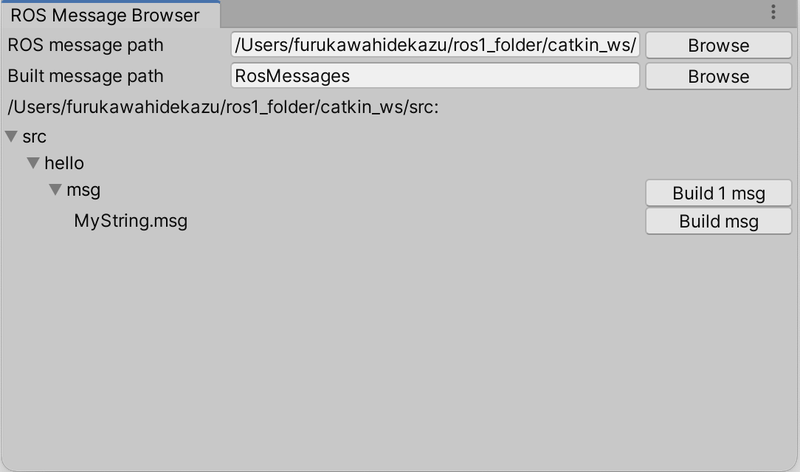
- 然后点击“MyString.msg”中的“Build msg”。这样“MyString.msg”将被转换成c#脚本“MyStringMsg”,并在Project窗口中输出“RosMessages”。
3. Topic话题
这一小节我们主要来说Topic的发布和订阅,首先我们来看一下发布者的Unity编程。
-
在Hierarchy窗口的“+→Create Empty”中创建空GameObject,命名为“Publisher”。
-
在“Publisher”中追加新脚本“ChatterPublisher”,编辑如下
using UnityEngine; using Unity.Robotics.ROSTCPConnector; using MyStringMsg = RosMessageTypes.Hello.MyStringMsg; public class ChatterPublisher : MonoBehaviour { private ROSConnection ros; // 初始化时被调用 void Start() { // 向ROS连接注册Topic话题 ros = ROSConnection.instance; ros.RegisterPublisher<MyStringMsg>("chatter"); } // 每帧更新 void FixedUpdate() { // 发送msg信息 MyStringMsg msg = new MyStringMsg("Hello Unity!"); ros.Send("chatter", msg); } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
-
而接收者和发布者类似,都在Hierarchy窗口的“+→Create Empty”中创建空GameObject,命名为“Subscriber”。
-
在“Subscriber”中添加新的脚本“ChatterSubscriber”,编辑如下。
using System.Collections; using System.Collections.Generic; using UnityEngine; using Unity.Robotics.ROSTCPConnector; using MyStringMsg = RosMessageTypes.Hello.MyStringMsg; public class ChatterSubscriber : MonoBehaviour{ void Start(){ // 向ROS连接注册Subscribe ROSConnection.instance.Subscribe<MyStringMsg>("chatter", Callback); } void Callback(MyStringMsg msg){ Debug.Log(msg.data); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
同时我们可以在ROS当中订阅这些信息,运行
roscore
rosparam set ROS_IP 127.0.0.1
rosparam set ROS_TCP_PORT 10000
rosrun ros_tcp_endpoint default_server_endpoint.py
# roslauch ros_tcp_endpoint endpoint.launch tcp_ip:=127.0.0.1 tcp_port:=10000 # 将127.0.0.1
- 1
- 2
- 3
- 4
- 5
然后写一个listener.py的订阅器