
热门标签
热门文章
- 14k视频分辨率的码流_视频的分辨率、码率、帧率你都了解吗,如何设置才更好?...
- 2爬虫安装问题解决汇总_file "d:\python\lib\site-packages\pkg_resources\__
- 3AI芯片竞争白热化!Meta官宣最新AI推理芯片!性能提升300%,支撑Llama高负载计算
- 4论文学习「翻译」:《Understanding LSTM Netword》,附原文_lstm神经网络英文文献
- 5OpenBmc开发10:hwmon简介
- 6BosonNLP情感词典 评论情感分析
- 7【python爬虫】爬虫所需要的爬虫代理ip是什么?
- 8【网站项目】党员之家服务系统小程序
- 9Flutter框架简述
- 10Windows服务器远程桌面连接RDP_选择允许远程桌面连接,并点击“选择用户”,赋予用户通过远程桌面连接的权限
当前位置: article > 正文
多旋翼无人机振动分析与减振方法_无人机振动原理
作者:凡人多烦事01 | 2024-04-13 17:12:46
赞
踩
无人机振动原理
振动分析
振动机制包括:
- 激励(振动源)
- 系统
- 响应
无人机振动机制:
- 激励 —— 动力系统(旋翼+电机)
- 系统 —— 机架
- 响应 —— 传感器(惯导)
无人机振动来源:
- 动不平衡,振动频率等于旋转频率
- 单个旋翼产生的周期性气动力(升力波),引起的振动二次谐波
- 多个旋翼流场相互耦合产生的二次以上的谐波
振动影响方向:
- 动不平衡 —— 水平方向
- 气动力 —— 垂直方向
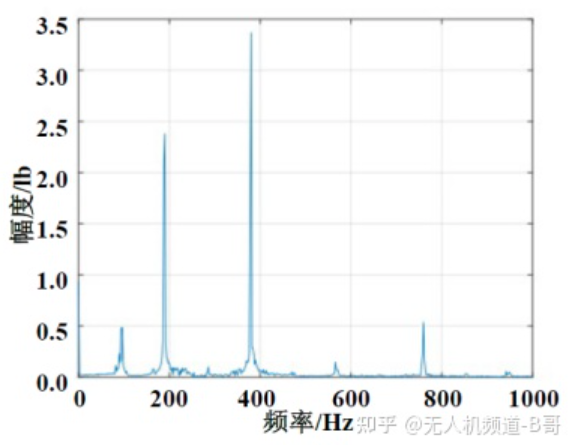
上图电机旋转频率为95Hz,可以看出振动信号的基频为电机旋转频率,另外存在2、4、8次谐波分量
振动对无人机的危害:
对于多旋翼飞行器而言,振动最大的危害是使惯性测量单元的测量失真,进而导致状态估计误差增大,影响控制性能,严重可使控制发散。
机架振动分析结论:
- 机臂中间段形变大于外段和内段,机臂中间段平均振幅最强
- 机架中部,形变最小,布置飞行控制器所需惯性测量单元的理想位置
无人机减振设计
减振的目标是降低高频和中频振动,同时仍然允许低频来反应实际运动与机身同步进行。
减振的手段大体可以分为两种:
- 机械减振
- 数值滤波减振
机械减振
机械减振可以作为一种有效的噪声消除手段。它通过阻挡无效信号进入传感器,从源头上滤去噪音,很多时候能实现数字滤波达不到的效果。从减振降噪的角度看,阻尼是指耗损振动的能量的能力,将振动的机械能转化为内能或其他形式的能量,从而达到减振的目的。
机械减振有几种方法
1、3M泡沫

3M 泡沫两面都有粘性,预先切割好,分别贴在飞控的四个角上
2、凝胶垫
将凝胶切成 1 厘米 ~ 2 厘米的方块,并贴在飞控的每个角落。
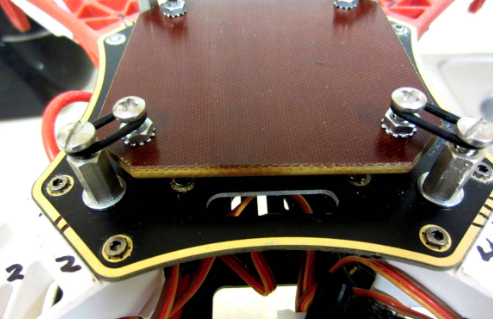
3、防震平台


安装时可使用双面胶,或间隔 45mm x 45mm 的 M3 螺丝
5、O型圈悬架安装
数字滤波减振
尽管机械减振的效果显著,但它需要在机械设计和材料选择上进行大量的改动和尝试,这在很多情况下并不方便。相比之下,数字滤波减振就显得更为简单和高效。它通过软件算法,将不必要的高频信号滤除。
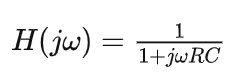
可以通过频谱分析,使用一阶低通滤波或者带阻滤波,来滤除不必要的高频信号。
常用的一阶低通滤波器如下:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/凡人多烦事01/article/detail/417544
推荐阅读
相关标签

