
热门标签
热门文章
- 1【Ubuntu】Ubuntu 22.04 升级 OpenSSH 9.3p2 修复CVE-2023-38408_ubuntu22.04升级openssh
- 2YOLOv10论文解读——实时的端到端目标检测模型【附结构图】
- 3java加密算法pbkdf2_pbkdf2加密算法工具类
- 4STM32CUBEMX配置教程(三)通用GPIO配置_stm32cubemx怎么设置gpio精准输出
- 5从0到1搭建一台属于个人的服务器,永久可运行!
- 6评价得分计算:确立权重的方法
- 7JAVA程序员面试系列(二)_为啥java需要二面
- 8Jenkins的部署过程,从输入分支名开始,后台都经历了哪些
- 9Ollama配置webui连接大预言模型_ollama ui
- 10用树莓派4B安装gitlab,亲测可用~_树莓派 gitlab
当前位置: article > 正文
ROS教程(四):RVIZ使用教程(详细图文)
作者:凡人多烦事01 | 2024-06-04 01:10:02
赞
踩
rviz
ros教程:rviz使用教程
前言
根据前面的教程已经学会了创建功能包,那么本篇文章主要内容则是通过节点来发布数据至RVIZ
提示:以下是本篇文章正文内容,下面案例可供参考
一、RVIZ介绍
rviz是ros的一个可视化工具,用于可视化传感器的数据和状态信息。
rviz支持丰富的数据类型,通过加载不同的Dispalys类型来可视化,每一个Dispaly都有一个独特的名字。
1.数据类型介绍
常见的display类型
| 类型 | 描述 | 消息类型 |
|---|---|---|
| Axes | 显示坐标系 | – |
| Markers | 绘制各种基本形状(箭头、立方体、球体、圆柱体、线带、线列表、立方体列表、点、文本、mesh数据、三角形列表等) | visualization_msgs::Marker visualization_msgs::MarkerArray |
| Camera | 打开一个新窗口显示摄像头图像 | sensor_msgs/Image sensor_msgs/CameraInfo |
| Grid | 显示网格 | – |
| Image | 打开一个新窗口显示图像信息 | sensor_msgs/Image |
| LaserScan | 将传感器信息中的数据显示为世界上的点、 绘制为点或立方体 |
sensor_msgs/LaserScan |
| Image | 显示图像 | sensor_msgs/Image |
| PointCloud | 显示点云数据 | sensor_msgs/PointCloud |
| Odomerty | 显示里程计数据 | nav_msgs/Odometry |
| PointCloud2 | 显示点云数据 | sensor_msgs/PointCloud2 |
| RobotModel | 显示机器人模型 | – |
| TF | 显示TF树 | – |
2.界面介绍
RVIZ整体界面

添加显示界面
点击add按钮:
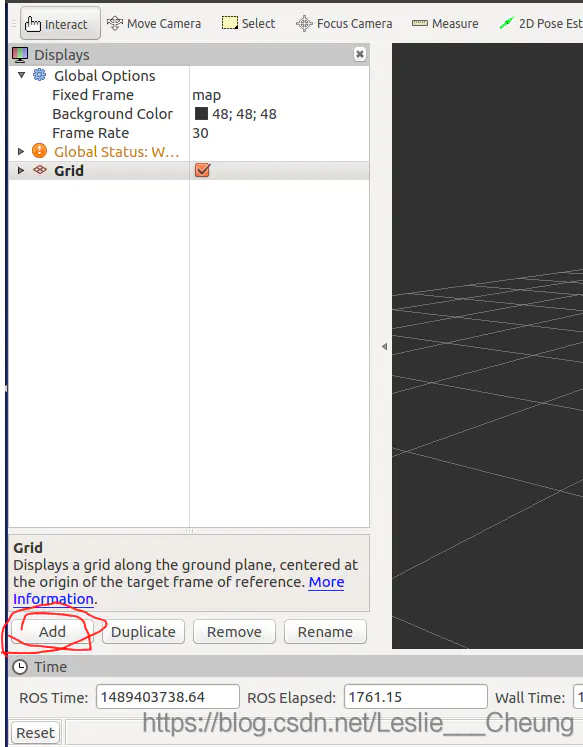
然后会弹出来一个对话
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/凡人多烦事01/article/detail/669732
推荐阅读
相关标签

