
热门标签
热门文章
- 1MySQL复习题_仅修改数据表中的字段名称时,通常使用alter table…modify实现
- 2NVIDIA推出IsaacNovaOrin加快自主移动机器人的发展_nova orin
- 3微信小程序——点击tabbar里的按钮跳转到另一个tabbar中的内容_按一个键到下一个标注简化小程序
- 4服务器硬盘数据备份到nas,这么设置USBCopy数据就能轻松备份至NAS
- 5已解决redis.clients.jedis.exceptions.JedisAskDataException异常的正确解决方法,亲测有效!!!_redis.clients.jedis.exceptions.jedisdataexception:
- 6植物大战僵尸杂交版破解C++实现
- 7Vivado中信号被优化掉,无法使用探针_vivado 设备设计和探针不匹配
- 8服务器上paddleOCR的bug记录_paddleocr集成tablestructure
- 903 pytest fixture(夹具)_testfixure测试夹具
- 10CorelDRAW2024绿色版汉化补丁器_coreldraw2020绿色便携版
当前位置: article > 正文
PX4 & gazebo仿真 offboard模式无法起飞解决思路 2023.5.19更新_px4拒绝起飞
作者:我家自动化 | 2024-06-08 05:36:38
赞
踩
px4拒绝起飞
前言
我用最新版PX4固件,offboard模式飞机无法起飞,网上有一种说法是固件版本的问题,让用旧一点的版本
添加链接描述
这个链接描述的情况和我的一模一样,所以我肯定是按这个方法尝试的
安装旧版本卡住了,打算从源头解决,继续查找offboard模式无人机无法起飞的原因,看到下面这篇文章。
解决offboard模式无人机无法起飞
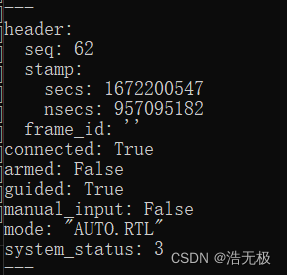
使用rostopic echo /mavros/state命令,查询结果如下。可以看到,mavros是连接上的,就是无法解锁。
两个方法解决:
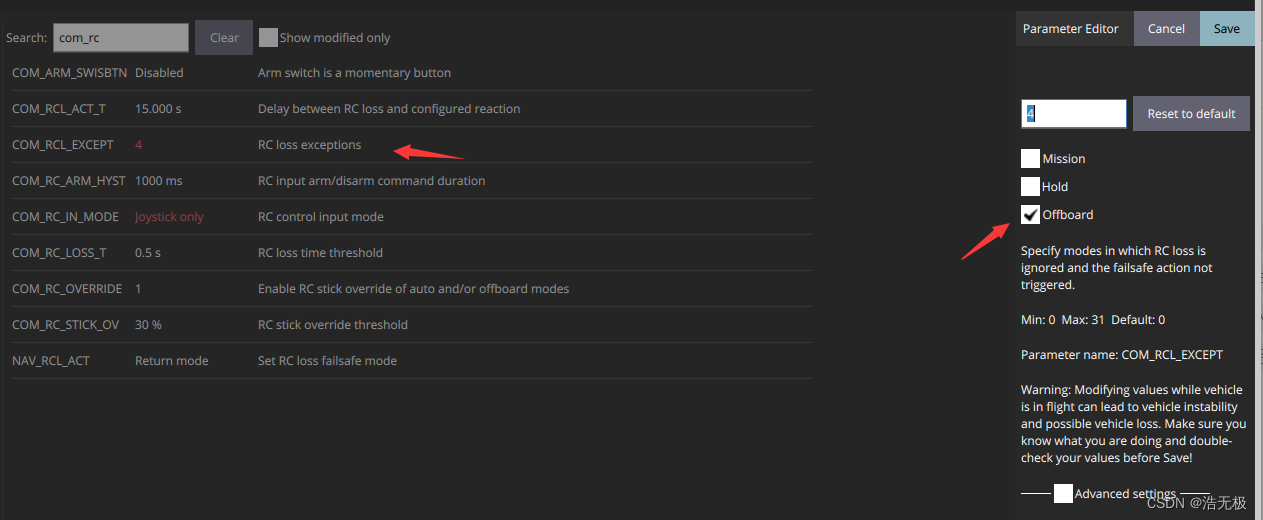
1、在仿真同时开启QGC,设置COM_RCL_EXCEPT=4
2、下载一个管用的旧版本,我之前尝试该方法失败了。但我觉得这个办法是可行的,我可能是网络不好,下载出错了,安装PX4环境经常会因为网络问题出现各种奇怪问题。
我使用方法一,最后起飞咯,镇楼。
第三个解决方法(2023.5.19更新)
启动好前面的文件之后。
使用命令:rosrun mavros mavparam set COM_RCL_EXCEPT 4
这个方法最简单,我几乎找了全网,没有提到这个方法的。要是有用还不点个赞!
参考链接:
http://wiki.ros.org/mavros
https://masoudir.github.io/mavros_tutorial/Chapter1_ArduRover_with_CLI/Step4_How_to_set_and_get_parameters/
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/688597
推荐阅读
相关标签

