- 1javascript算法之从会用到理解 - 双指针_js双指针算法
- 2图像增强方法汇总OpenCV+python实现【第一部分:常用图像增强方法】_图像增强的方法有哪些
- 3Meta Quest3导入package包 笔记_quest 安装package
- 4java_hashmap和treemap什么区别?低层数据结构是什么?
- 5【Java】---Map体系集合:Map接口及常用方法_java map 接口
- 6STM32F407 ADC多通道采样+DMA_stm32f4 adc dma
- 7windows server-注册表启动TLS 1.2关闭TLS1.1和TLS1.0_windows tls 1.1
- 8iOS 申请P12证书以及Profile描述文件_ios p12证书
- 9c语言vc下在如何播放音乐,VC程序播放音乐必备
- 10Github使用教程图文详解_gitee使用教程图文详解
CVPR2024 Tracking 汇总_diffusiontrack: point set diffusion model for visu
赞
踩
大模型辅助总结
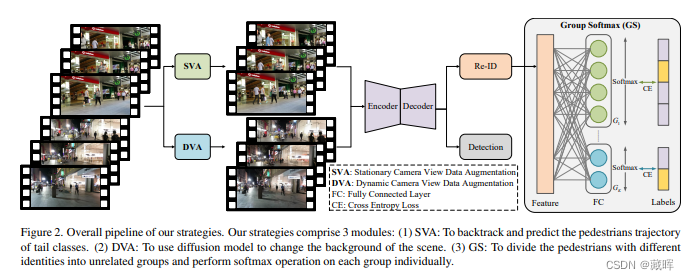
一、Delving into the Trajectory Long-tail Distribution for Muti-object Tracking
paper: https://arxiv.org/pdf/2403.04700
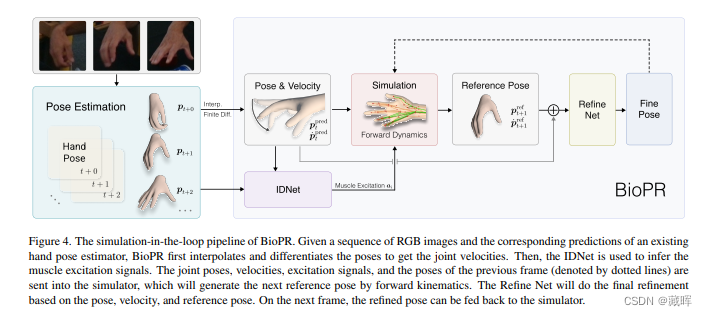
二、MS-MANO: Enabling Hand Pose Tracking with Biomechanical Constraints
paper: https://arxiv.org/pdf/2404.10227
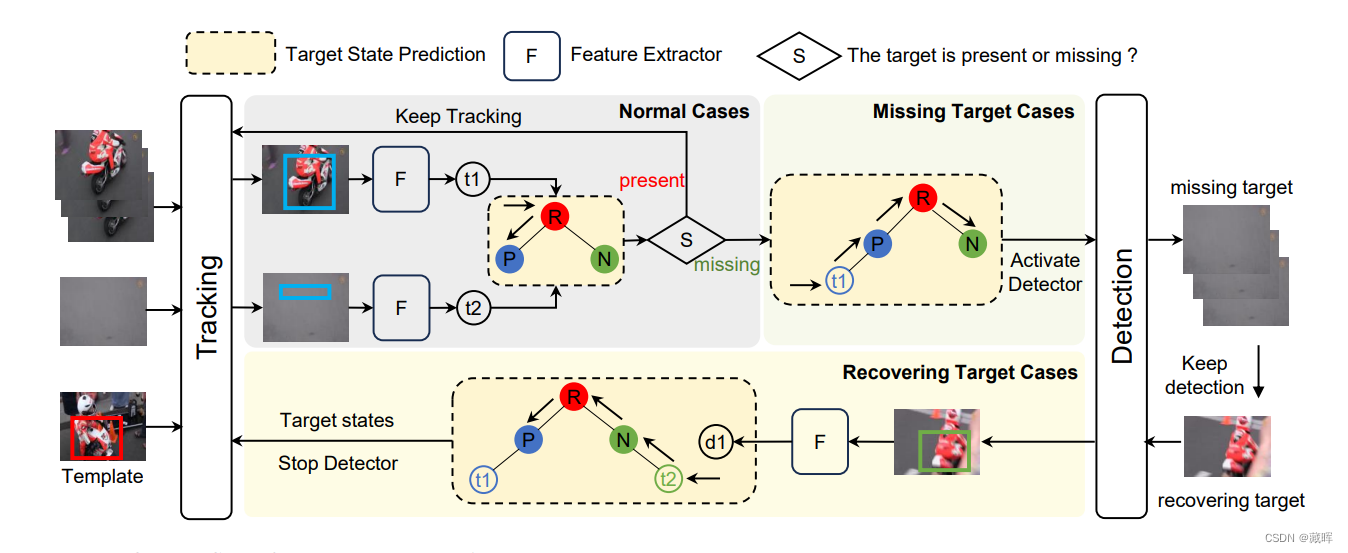
三、RTracker: Recoverable Tracking via PN Tree Structured Memory
paper: https://arxiv.org/pdf/2403.19242
论文提出了一种新的可恢复跟踪框架,旨在解决现有跟踪方法在目标丢失后难以自恢复的问题。
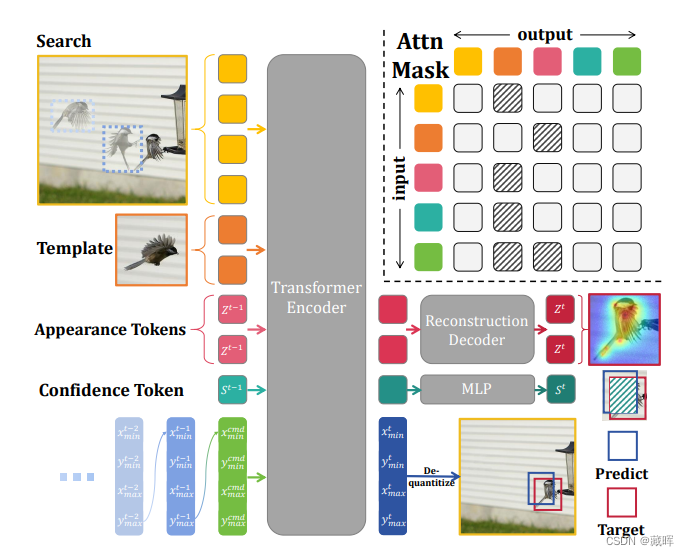
四、ARTrackV2: Prompting Autoregressive Tracker Where to Look and How to Describe
paper: https://arxiv.org/pdf/2312.17133
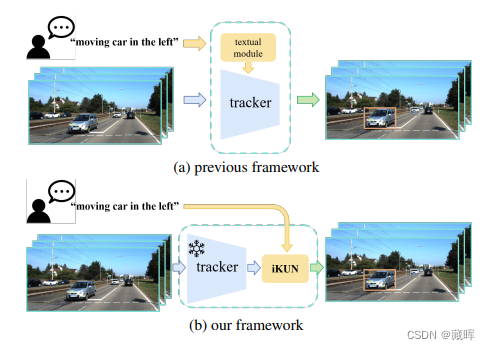
五、iKUN: Speak to Trackers without Retraining
paper: https://arxiv.org/pdf/2312.16245
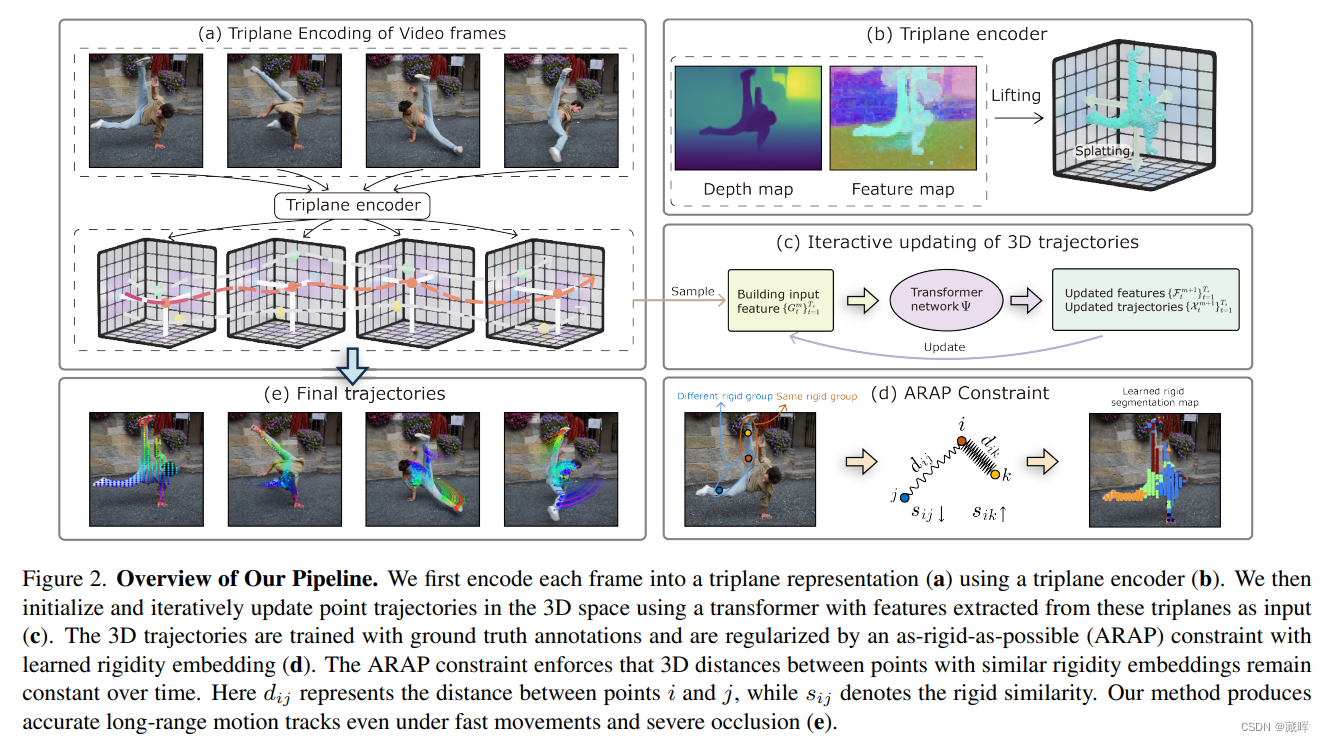
六、SpatialTracker: Tracking Any 2D Pixels in 3D Space
paper: https://arxiv.org/pdf/2404.04319
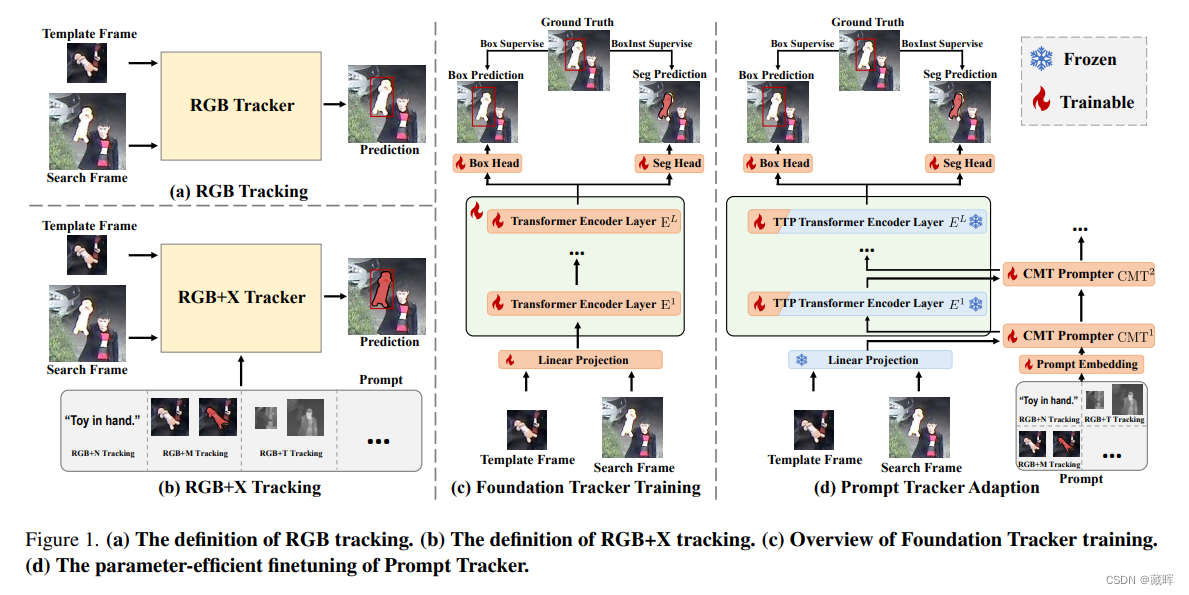
七、OneTracker: Unifying Visual Object Tracking with Foundation Models and Efficient Tuning
paper: https://arxiv.org/pdf/2403.09634
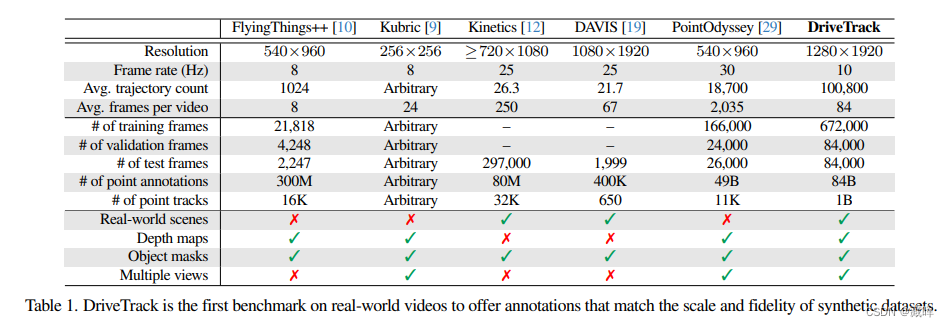
八、DriveTrack: A Benchmark for Long-Range Point Tracking in Real-World Videos
paper: https://arxiv.org/pdf/2312.09523
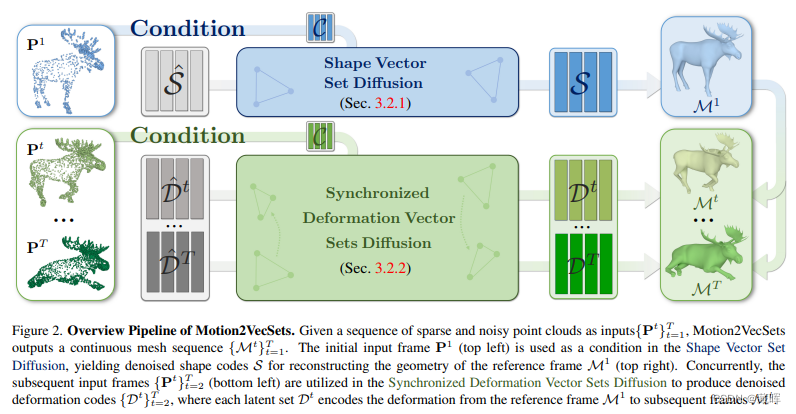
九、Motion2VecSets: 4D Latent Vector Set Diffusion for Non-rigid Shape Reconstruction and Tracking
paper: https://arxiv.org/pdf/2401.06614
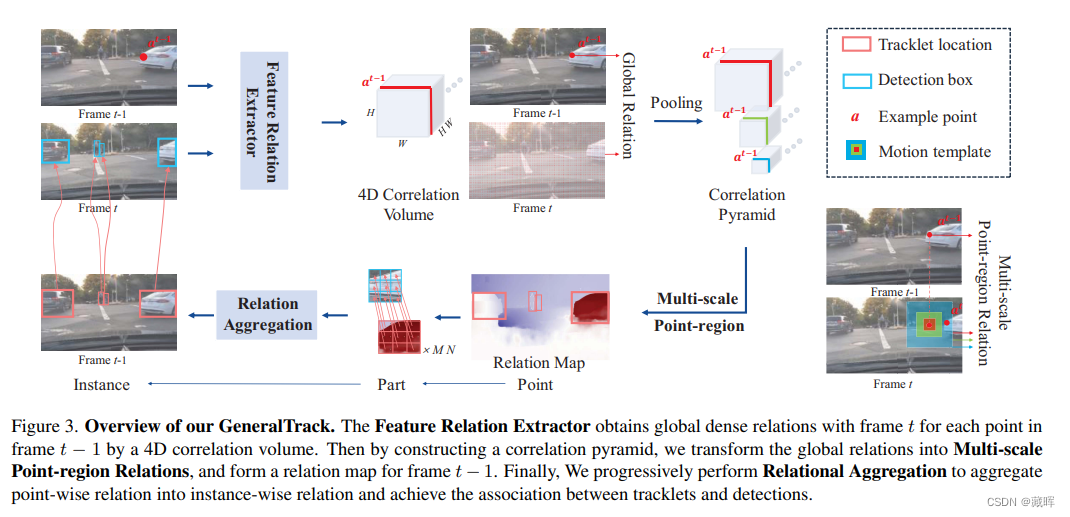
十、Towards Generalizable Multi-Object Tracking
paper: https://arxiv.org/pdf/2406.00429
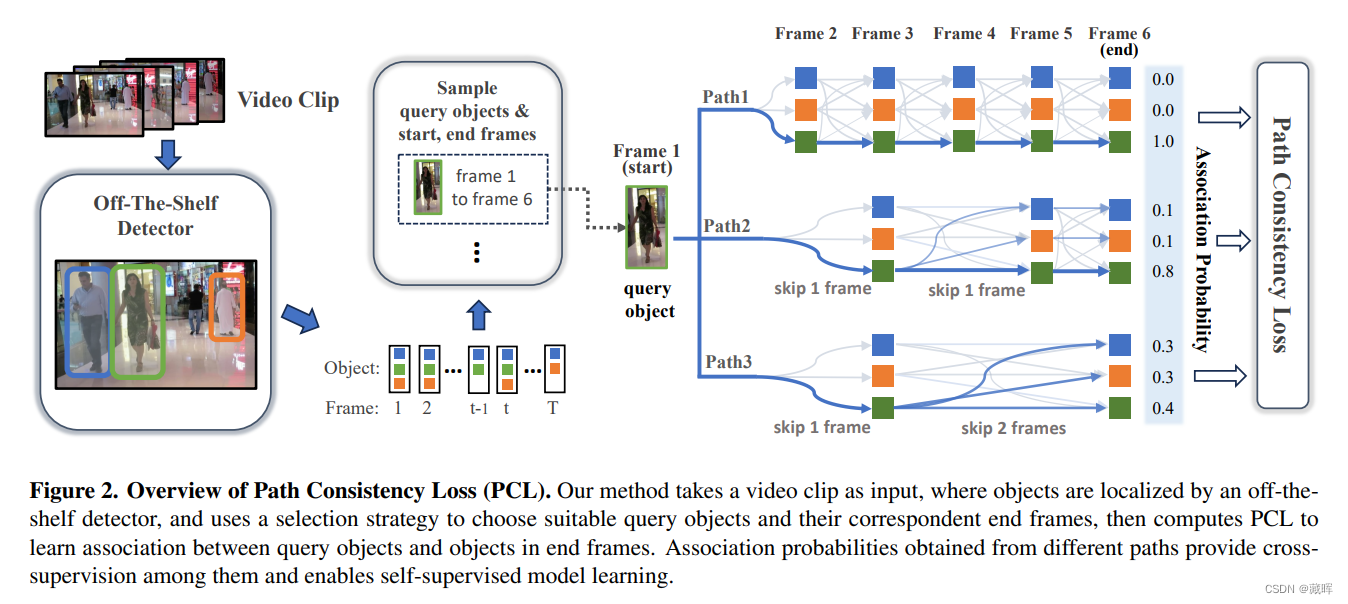
十一、Self-Supervised Multi-Object Tracking with Path Consistency
paper: https://arxiv.org/pdf/2404.05136
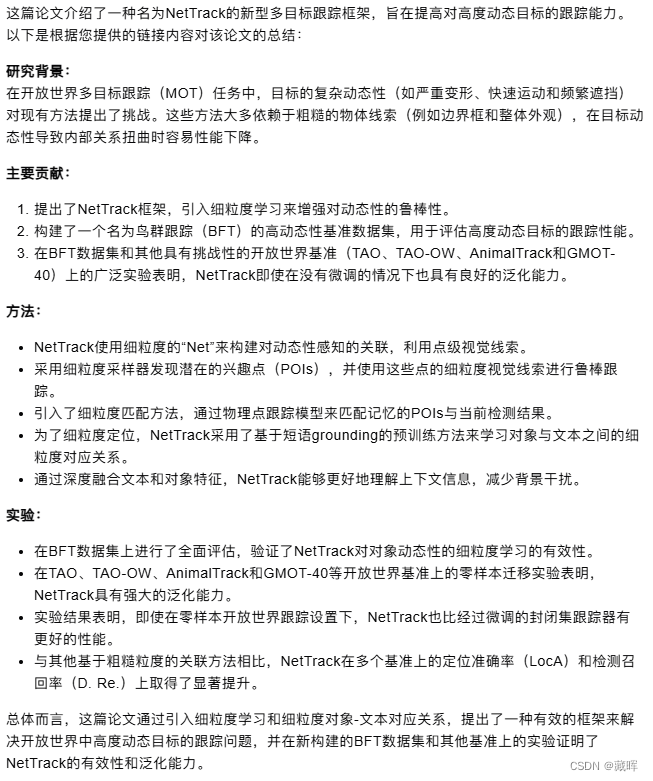
十二、NetTrack: Tracking Highly Dynamic Objects with a Net
paper: https://arxiv.org/pdf/2403.11186

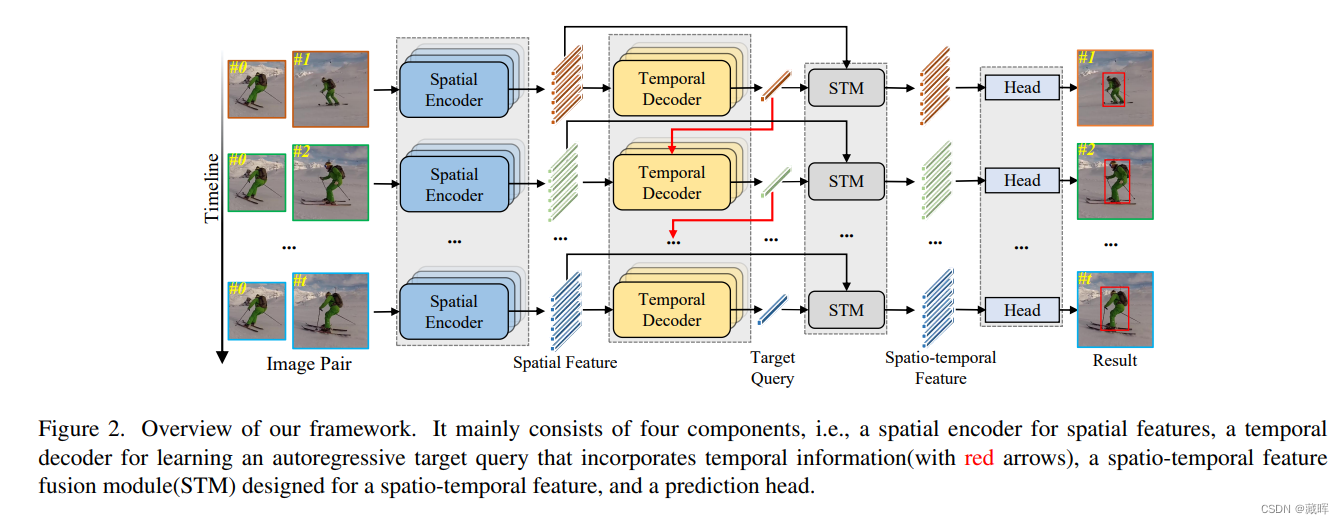
十三、Autoregressive Queries for Adaptive Tracking with Spatio-Temporal Transformers
paper: https://arxiv.org/pdf/2403.10574
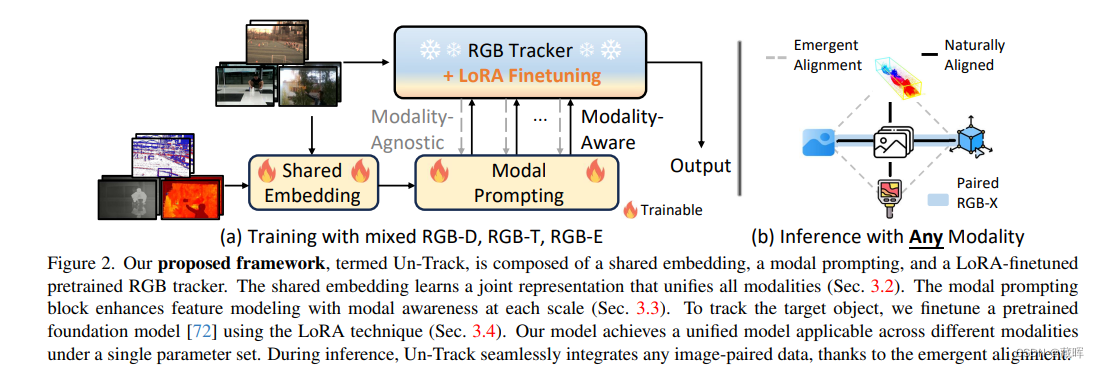
十四、Single-Model and Any-Modality for Video Object Tracking
paper: https://arxiv.org/pdf/2311.15851
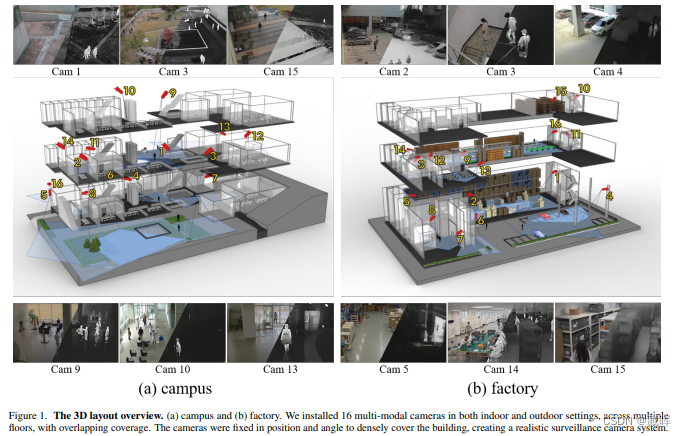
十五、MTMMC: A Large-Scale Real-World Multi-Modal Camera Tracking Benchmark
paper: https://arxiv.org/pdf/2403.20225
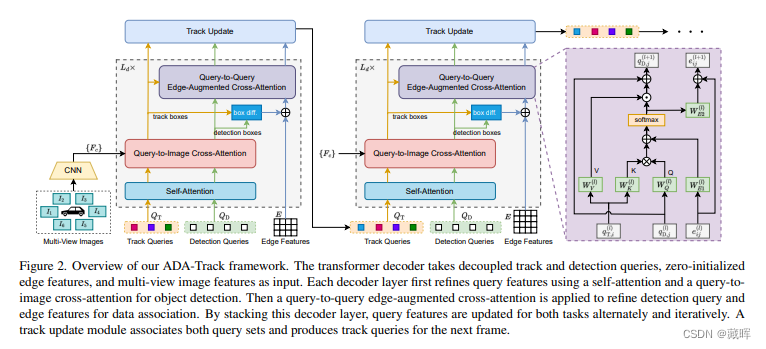
十六、ADA-Track: End-to-End Multi-Camera 3D Multi-Object Tracking with Alternating Detection and Association
paper: https://arxiv.org/pdf/2405.08909
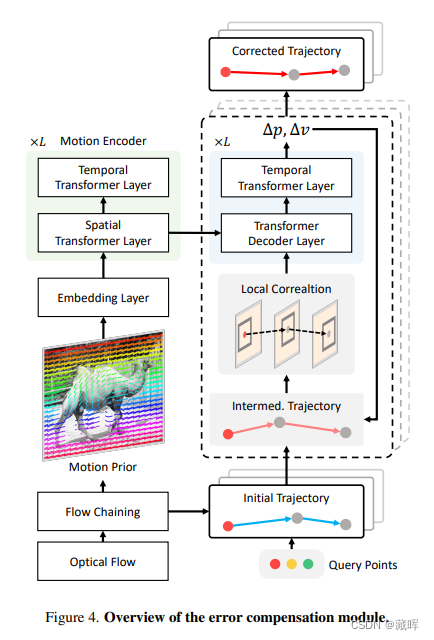
十七、FlowTrack: Revisiting Optical Flow for Long-Range Dense Tracking
paper: https://openaccess.thecvf.com/content/CVPR2024/papers/Cho_FlowTrack_Revisiting_Optical_Flow_for_Long-Range_Dense_Tracking_CVPR_2024_paper.pdf
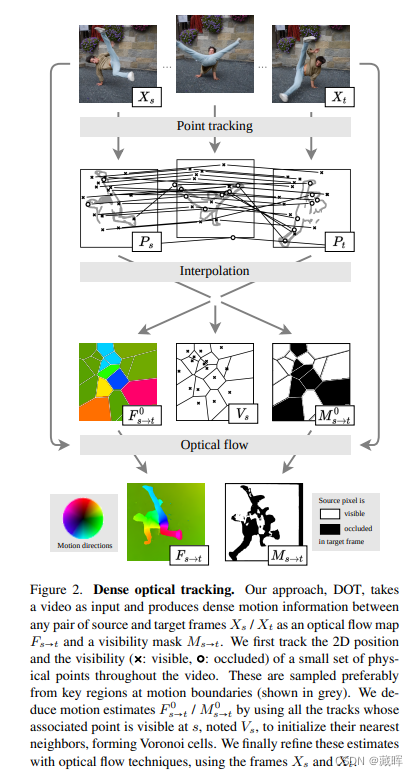
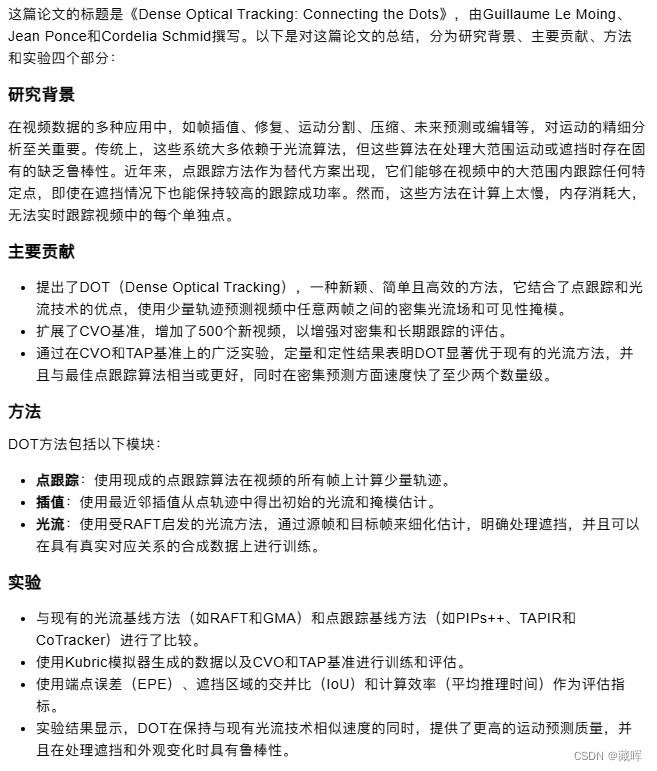
十八、Dense Optical Tracking: Connecting the Dots
paper: https://arxiv.org/pdf/2312.00786
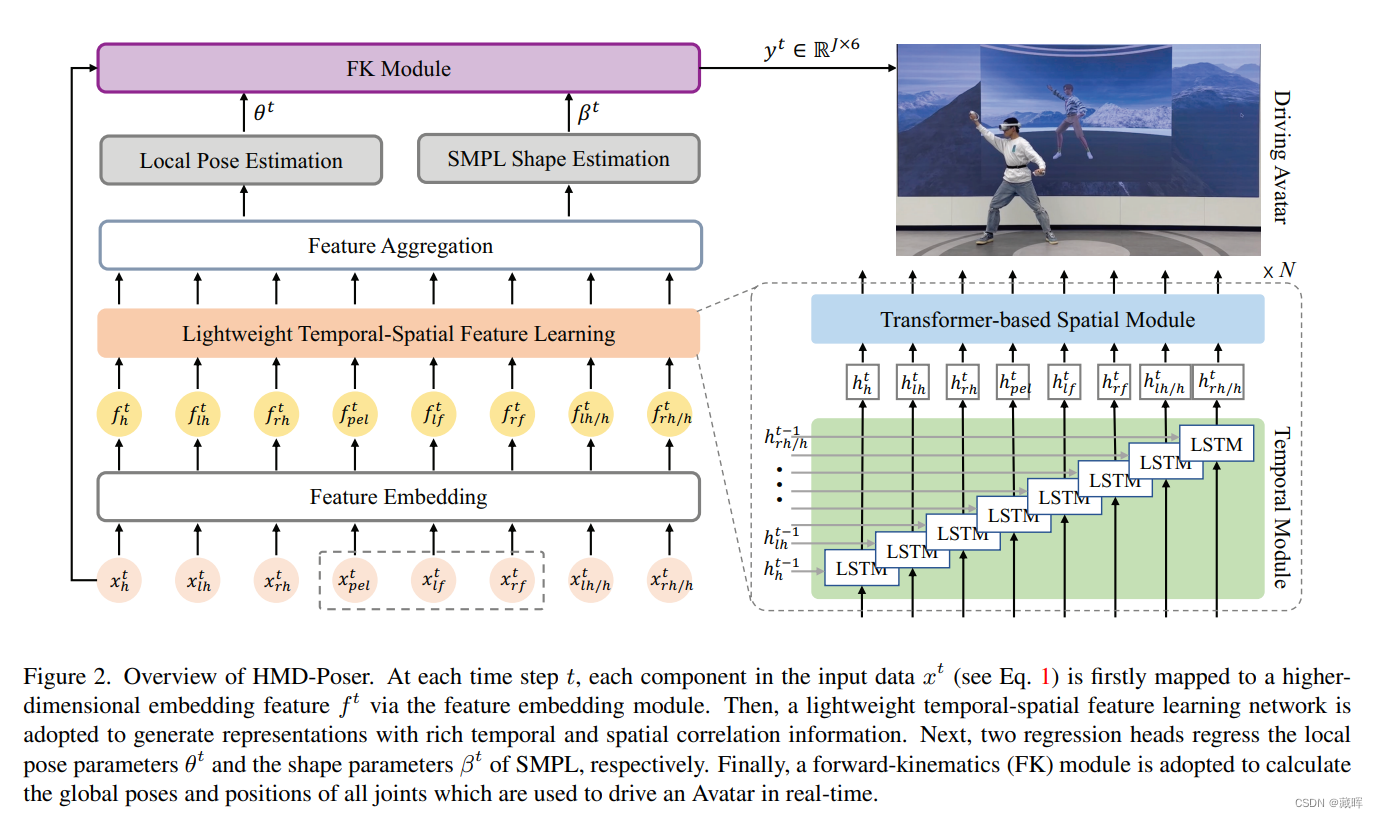
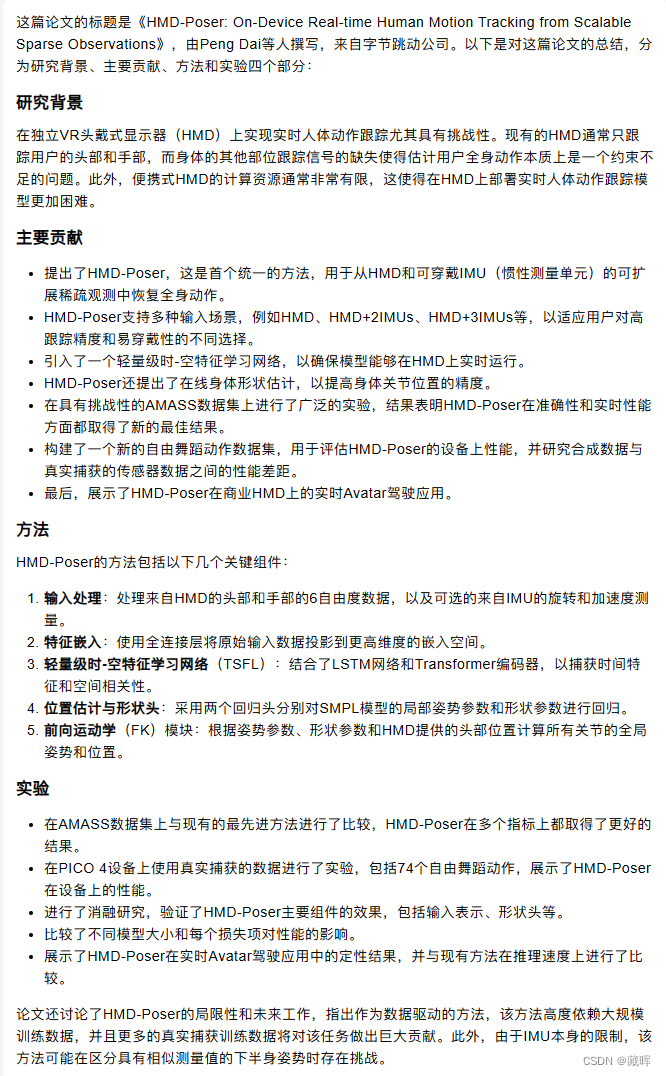
十九、HMD-Poser: On-Device Real-time Human Motion Tracking from Scalable Sparse Observations
paper: https://arxiv.org/pdf/2403.03561
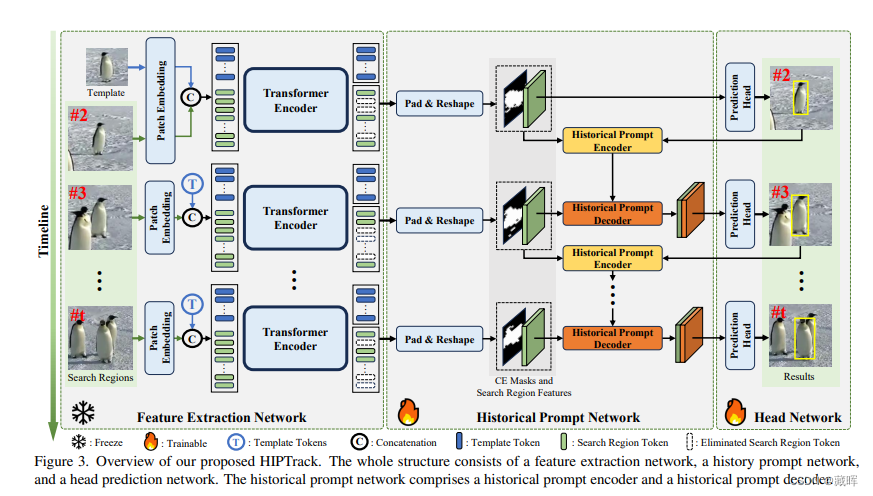
二十、HIPTrack: Visual Tracking with Historical Prompts
paper: https://arxiv.org/pdf/2311.02072
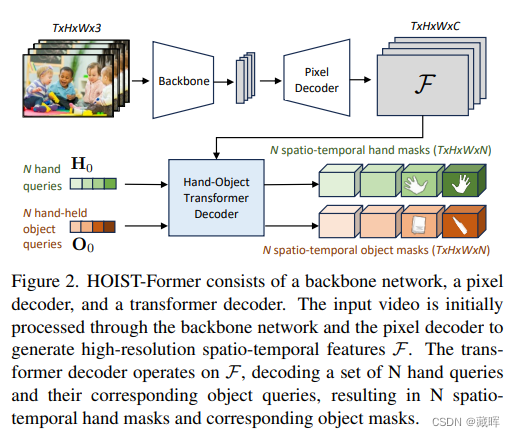
二十一、HOIST-Former: Hand-held Objects Identification Segmentation and Tracking in the Wild
paper: https://arxiv.org/pdf/2404.13819
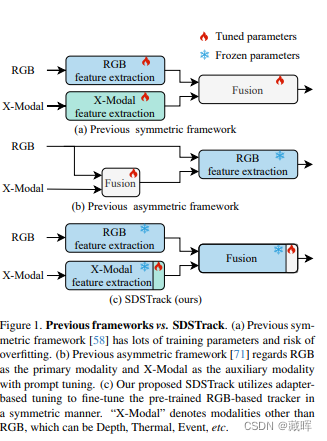
二十二、SDSTrack: Self-Distillation Symmetric Adapter Learning for Multi-Modal Visual Object Tracking
paper: https://arxiv.org/pdf/2403.16002
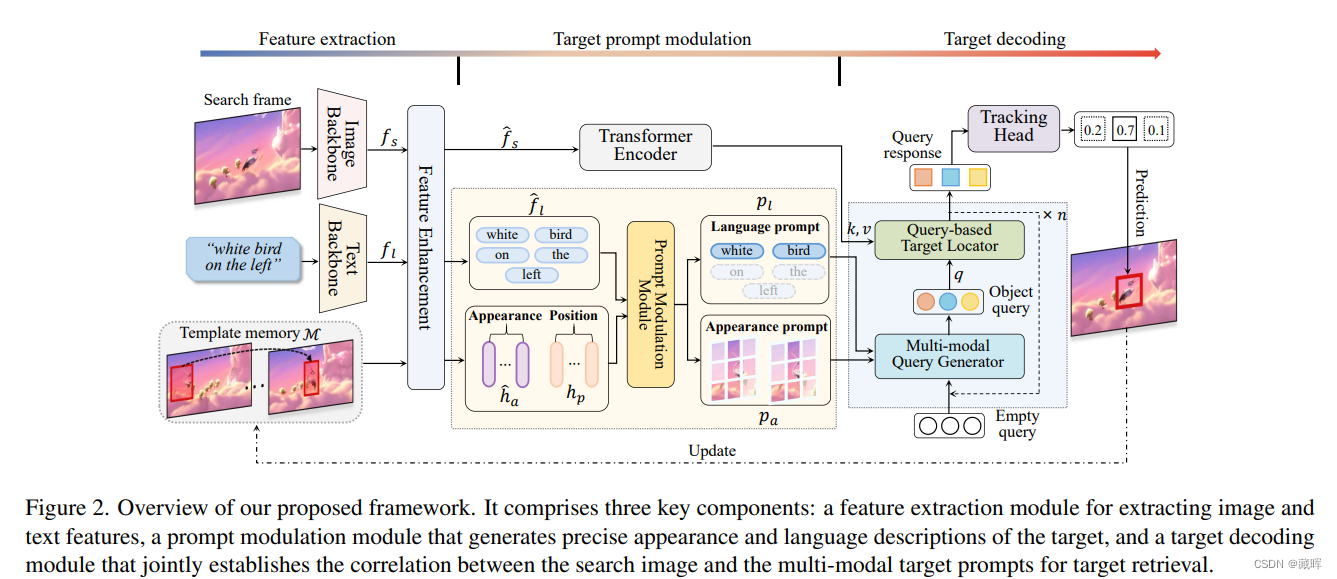
二十三、Context-Aware Integration of Language and Visual References for Natural Language Tracking
paper: https://arxiv.org/pdf/2403.19975
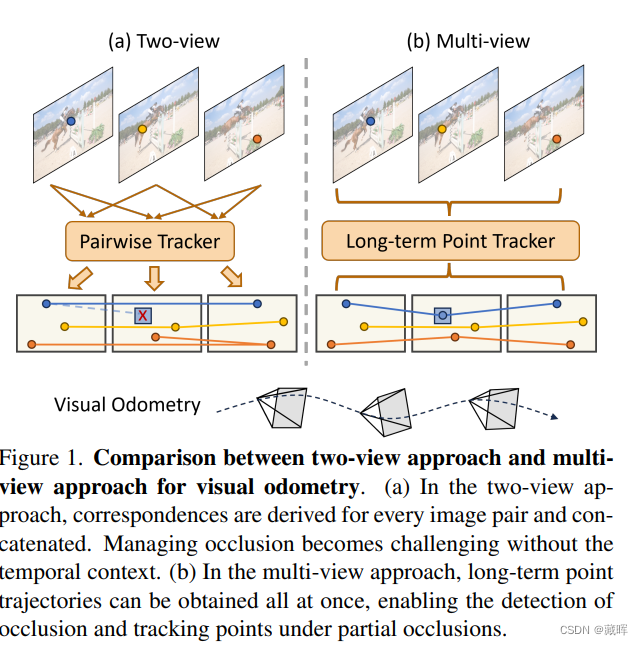
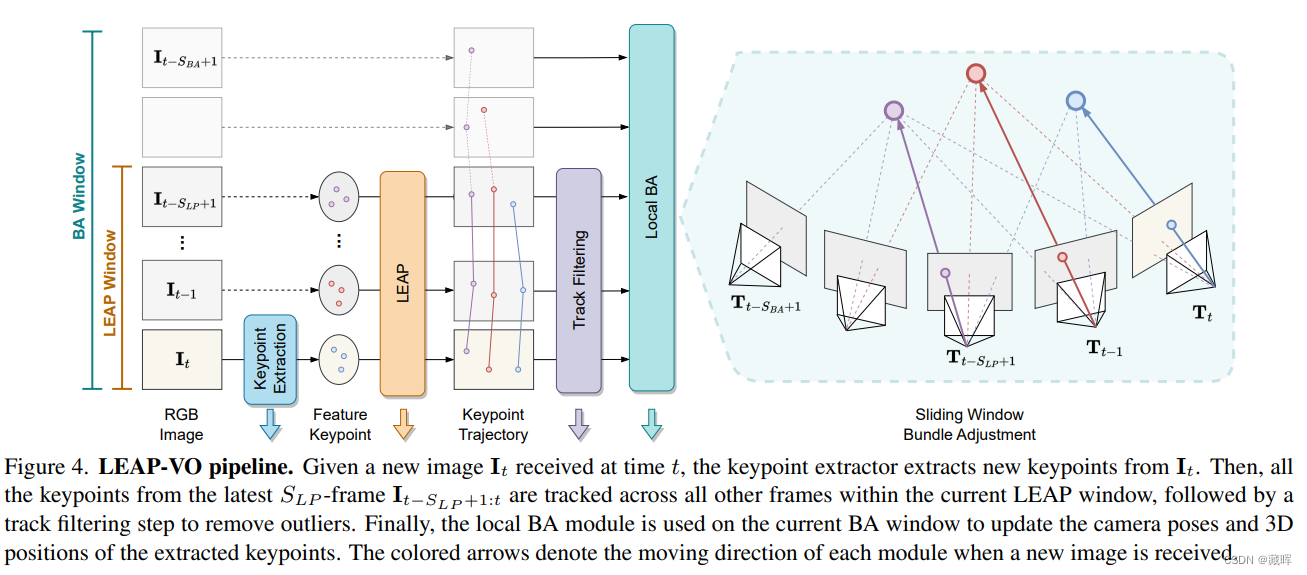
二十四、LEAP-VO: Long-term Effective Any Point Tracking for Visual Odometry
paper: https://arxiv.org/pdf/2401.01887
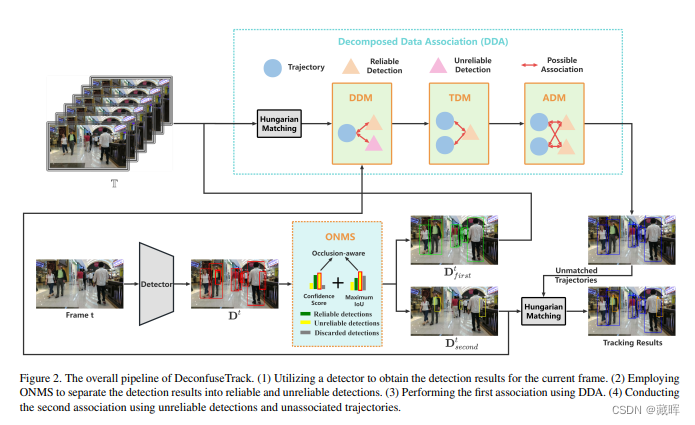
二十五、DeconfuseTrack: Dealing with Confusion for Multi-Object Tracking
paper: https://arxiv.org/pdf/2403.02767
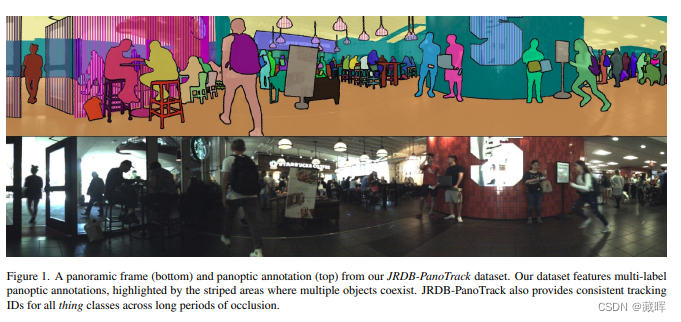
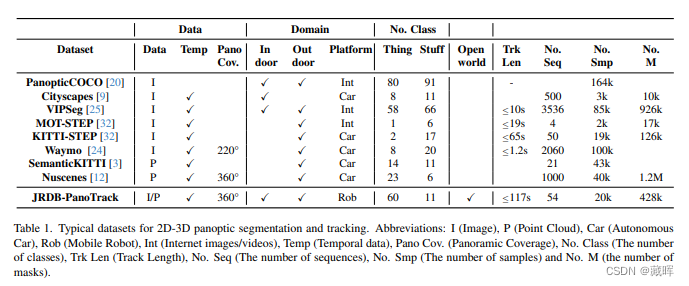
二十六、JRDB-PanoTrack: An Open-world Panoptic Segmentation and Tracking Robotic Dataset in Crowded Human Environments
paper: https://arxiv.org/pdf/2404.01686
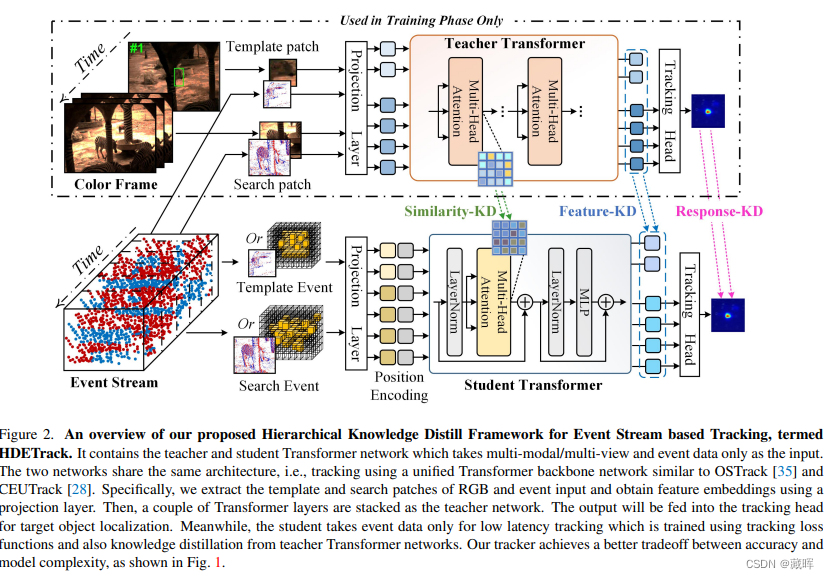
二十七、Event Stream-based Visual Object Tracking: A High-Resolution Benchmark Dataset and A Novel Baseline
paper: https://arxiv.org/pdf/2309.14611
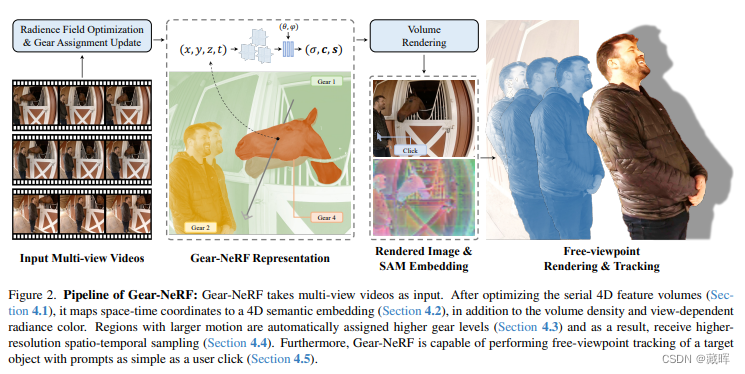
二十八、Gear-NeRF: Free-Viewpoint Rendering and Tracking with Motion-aware Spatio-Temporal Sampling
paper: https://arxiv.org/pdf/2406.03723
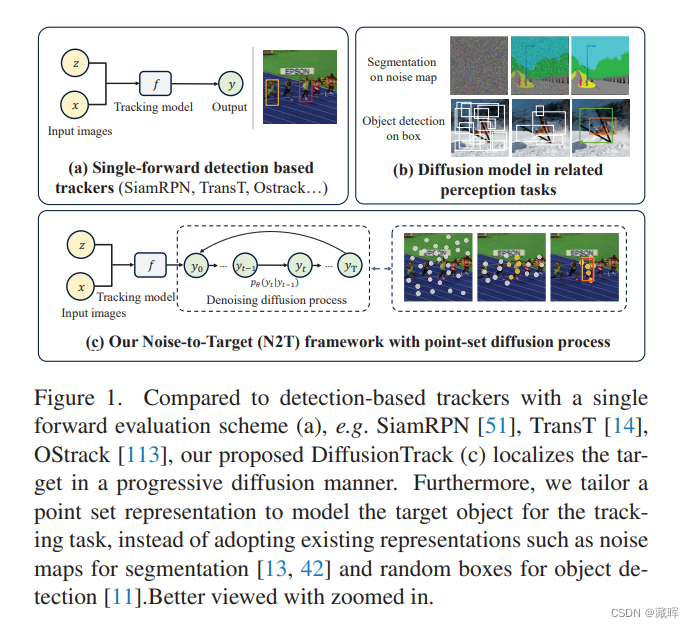
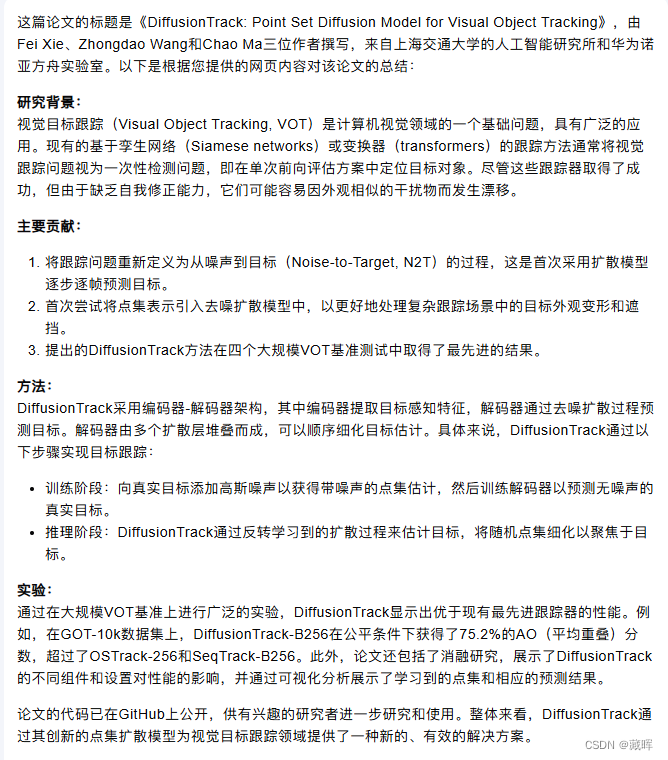
二十九、DiffusionTrack: Point Set Diffusion Model for Visual Object Tracking
paper: https://openaccess.thecvf.com/content/CVPR2024/papers/Xie_DiffusionTrack_Point_Set_Diffusion_Model_for_Visual_Object_Tracking_CVPR_2024_paper.pdf
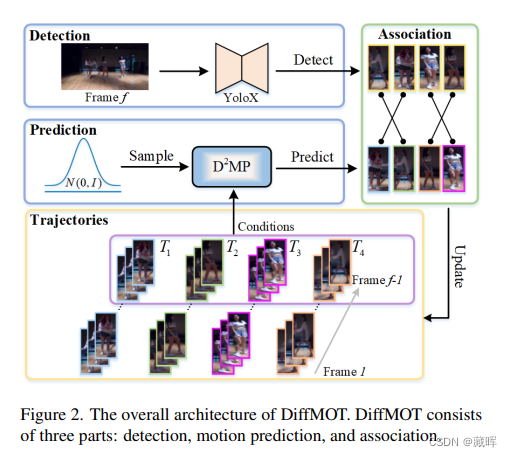
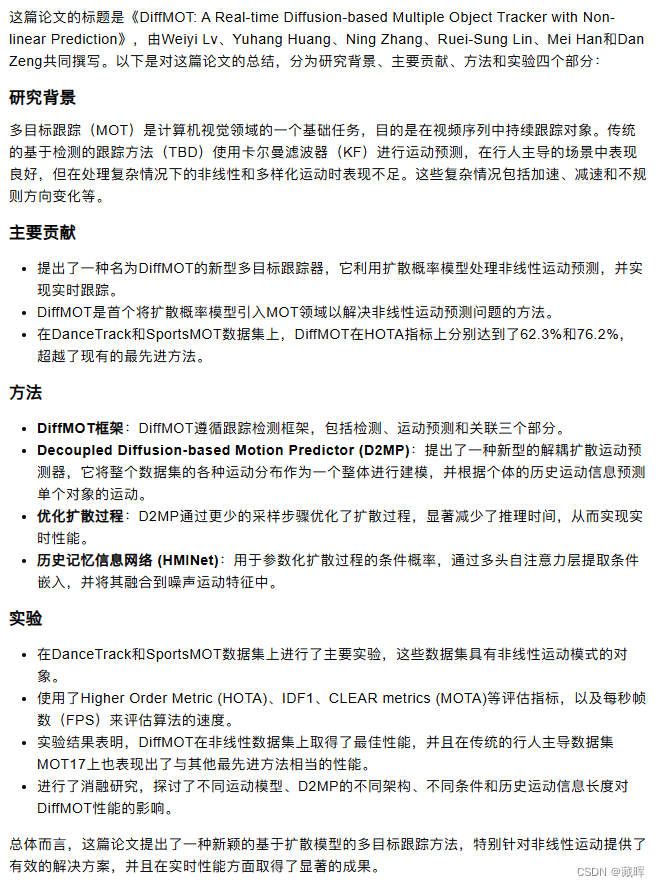
三十、DiffMOT: A Real-time Diffusion-based Multiple Object Tracker with Non-linear Prediction
paper: https://arxiv.org/pdf/2403.02075
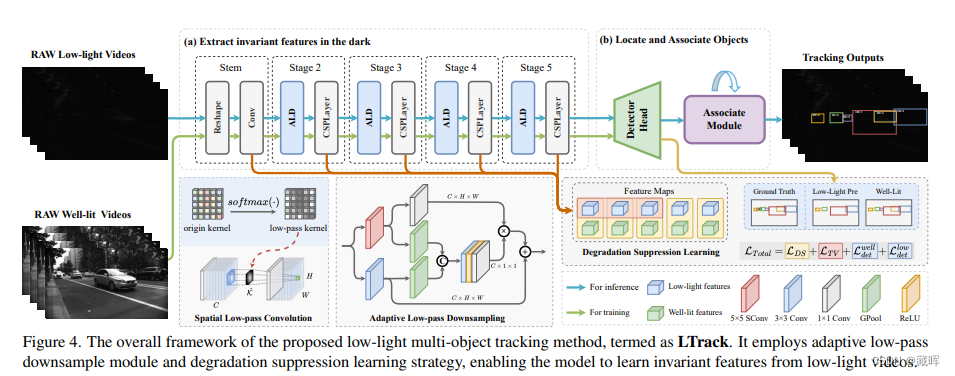
三十一、Multi-Object Tracking in the Dark
paper: https://arxiv.org/pdf/2405.06600