
- 1Spring Boot 允许跨域请求、自定义请求头_springboot 允许seesion跨域要添加什么header
- 26.如何优化第一种个人商业模式?
- 3实践torch.fx第一篇——基于Pytorch的模型优化量化神器
- 4浏览器查看hdfs文件时报错Couldn‘t preview the file. NetworkError: Failed to execute ‘send‘ on ‘XMLHttpRequest‘:_couldn't preview the file. networkerror: failed to
- 5LeetCode - 141. 环形链表 (C语言,快慢指针,配图)_141. 环形链表 c
- 6【Python】成功解决NameError: name ‘pd‘ is not defined_name 'pd' is not defined
- 7MPU6050滤波、姿态融合(一阶互补、卡尔曼)
- 8Flask Mega-Tutorial V2.0 第19章:Docker容器上的部署_docker flask tutorial
- 9pac全自动代理_findproxyforurl
- 10大数据学习笔记(四)——分布式文件系统HDFS_hdfs中的元数据不需要和文件块一起存储,可以由其他系统负责管理元数据
OpenCV实现SfM(三):多目三维重建_sfmviewer
赞
踩
注意:本文中的代码必须使用OpenCV3.0或以上版本进行编译,因为很多函数是3.0以后才加入的。
目录:
问题简化
终于有时间来填坑了,这次一口气将双目重建扩展为多目重建吧。首先,为了简化问题,我们要做一个重要假设:用于多目重建的图像是有序的,即相邻图像的拍摄位置也是相邻的。多目重建本身比较复杂,我会尽量说得清晰,如有表述不清的地方,还请见谅并欢迎提问。
求第三个相机的变换矩阵
由前面的文章我们知道,两个相机之间的变换矩阵可以通过findEssentialMat以及recoverPose函数来实现,设第一个相机的坐标系为世界坐标系,现在加入第三幅图像(相机),如何确定第三个相机(后面称为相机三)到到世界坐标系的变换矩阵呢?
最简单的想法,就是沿用双目重建的方法,即在第三幅图像和第一幅图像之间提取特征点,然后调用findEssentialMat和recoverPose。那么加入第四幅、第五幅,乃至更多呢?随着图像数量的增加,新加入的图像与第一幅图像的差异可能越来越大,特征点的提取变得异常困难,这时就不能再沿用双目重建的方法了。
那么能不能用新加入的图像和相邻图像进行特征匹配呢?比如第三幅与第二幅匹配,第四幅与第三幅匹配,以此类推。当然可以,但是这时就不能继续使用findEssentialMat和recoverPose来求取相机的变换矩阵了,因为这两个函数求取的是相对变换,比如相机三到相机二的变换,而我们需要的是相机三到相机一的变换。有人说,既然知道相机二到相机一的变换,又知道相机到三到相机二的变换,不就能求出相机三到相机一的变换吗?实际上,通过这种方式,你只能求出相机三到相机一的旋转变换(旋转矩阵R),而他们之间的位移向量T,是无法求出的。这是因为上面两个函数求出的位移向量,都是单位向量,丢失了相机之间位移的比例关系。
说了这么多,我们要怎么解决这些问题?现在请出本文的主角——solvePnP和solvePnPRansac。根据opencv的官方解释,该函数根据空间中的点与图像中的点的对应关系,求解相机在空间中的位置。也就是说,我知道一些空间当中点的坐标,还知道这些点在图像中的像素坐标,那么solvePnP就可以告诉我相机在空间当中的坐标。solvePnP和solvePnPRansac所实现的功能相同,只不过后者使用了随机一致性采样,使其对噪声更鲁棒,本文使用后者。
好了,有这么好的函数,怎么用于我们的三维重建呢?首先,使用双目重建的方法,对头两幅图像进行重建,这样就得到了一些空间中的点,加入第三幅图像后,使其与第二幅图像进行特征匹配,这些匹配点中,肯定有一部分也是图像二与图像一之间的匹配点,也就是说,这些匹配点中有一部分的空间坐标是已知的,同时又知道这些点在第三幅图像中的像素坐标,嗯,solvePnP所需的信息都有了,自然第三个相机的空间位置就求出来了。由于空间点的坐标都是世界坐标系下的(即第一个相机的坐标系),所以由solvePnP求出的相机位置也是世界坐标系下的,即相机三到相机一的变换矩阵。
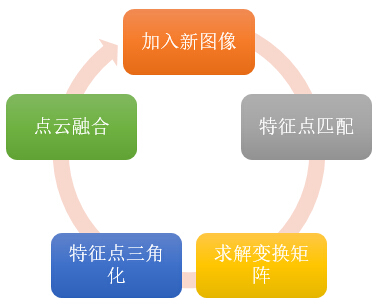
加入更多图像
通过上面的方法得到相机三的变换矩阵后,就可以使用上一篇文章提到的triangulatePoints方法将图像三和图像二之间的匹配点三角化,得到其空间坐标。为了使之后的图像仍能使用以上方法求解变换矩阵,我们还需要将新得到的空间点和之前的三维点云融合。已经存在的空间点,就没必要再添加了,只添加在图像二和三之间匹配,但在图像一和图像三中没有匹配的点。如此反复。
为了方便点云的融合以及今后的扩展,我们需要存储图像中每个特征点在空间中的对应点。在代码中我使用了一个二维列表,名字为correspond_struct_idx,correspond_struct_idx[i][j]代表第i幅图像第j个特征点所对应的空间点在点云中的索引,若索引小于零,说明该特征点在空间当中没有对应点。通过此结构,由特征匹配中的queryIdx和trainIdx就可以查询某个特征点在空间中的位置。
代码实现
前一篇文章的很多代码不用修改,还可以继续使用,但是程序的流程有了较大变化。首先是初始化点云,也就是通过双目重建方法对图像序列的头两幅图像进行重建

