
热门标签
热门文章
- 1KUKA - KRL_库卡机器人编程
- 2服务器负载均衡是什么以及工作原理和算法_内网服务器负载均衡
- 3Leetcode 66.加一_66. 加一
- 4springboot 集成Dubbo2.7.8 ,连接zookeeper 提示错误 zookeeper not connected_dubbo 2.7.8
- 5Python程序控制结构(一)分支结构:单分支、二分支及紧凑形式、多分支、判断条件及组合_单分支结构
- 6oracle 左连接去重,210115:数据库左连接/右连接/内连接-Oracle中 NVL函数使用-Oracle去重的三个方法...
- 7基于python的植物大战僵尸游戏开发_pycharm植物大战僵尸
- 8迅为IMX6ULL开发板NFS服务器的搭建_在imx6ull linux上面做服务器
- 9C语言小游戏--贪吃蛇(完整代码)_贪吃蛇代码
- 10代理Windows台式机支持Remote Desktop外网远程桌面连接, 随时玩转Stable Diffusion WebUI_stable diffuision代理
当前位置: article > 正文
kuka officelite 4._KUKA机器人的零点标定
作者:羊村懒王 | 2024-04-09 15:51:23
赞
踩
kuka零点标定
机械回零的目的是为了让机器人的电气零点(编码器零点)和机械零点重合。
熟悉数控机床的朋友们都知道,使用增量编码器的机床,开机第一件事就是会参考点(零点)。工业机器人也有零点,但并不是每次断电后重启要回零,因为机器人伺服电机用的是绝对编码器(断电后后电池持续供电),而零点是机器人坐标系的基准,没有零点机器人无法判断自己的位置,所以为了获得尽可能高的绝对定位精度,必须对机器人进行零点标定,以使机械零点和算法零点尽量接近(一般认为零点偏移对重复定位精度影响不大)。
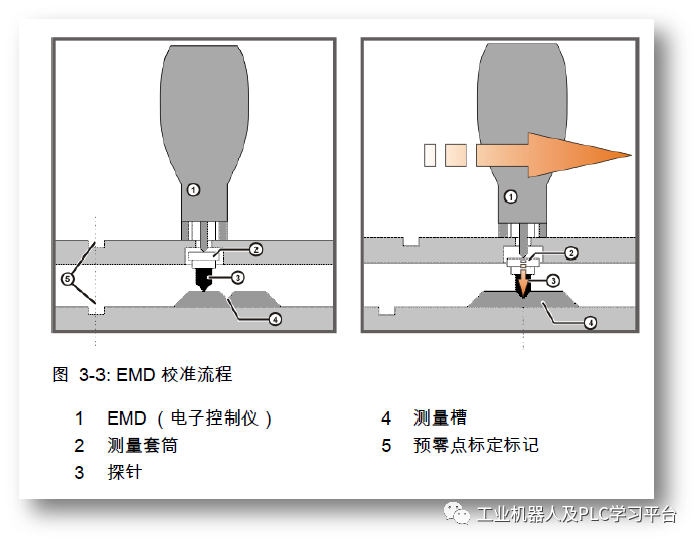
零点校正的原理:最凹槽的位置,即是该轴机器人机械零点的位置。电子校正工具根据操作步骤,自行找到零点;千分表属于手动方式,需要寻找千分表盘“指针”的拐点位置来确认。
仅在工业机器人得到充分和正确标定零点时,它的使用效果才会最好。因为只有这样,机器人才能达到它最高的点精度和轨迹精度或者完全能够以编程设定的动作运动。
原则上,机器人必须时刻处于已标定零点的状态。
在以下情况下必须进行零点标定:1、新设备初次运行时。2、在对参与定位值感测的部件(例如带分解器或 RDC 的电机)采取了维护措施之后。3、当未用控制器移动了机器人轴 (例如借助于自由旋转装置)时。4、进行了机械修理后(问题是必须先删除机器人的零点,然后才可标定零点)。5、更换齿轮箱后。6、发生了较严重
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/393774
推荐阅读

相关标签

