
热门标签
热门文章
- 1人工智能面试总结(1)——基础理论_人工智能春招八股基础知识
- 2百度深度学习框架飞桨PaddelPaddel安装_could not find a version that satisfies the requir
- 3elasticsearch重置密码操作_elasticsearch-reset-password
- 4将前端传来的json字符串转化为String数组_前端json转string数组
- 5如何解决git clone http/https仓库失败(403错误)_git clone 配置http
- 6Fast-Planner(一)前端详解kinodynamic A*
- 7(51媒体)媒体邀约的好处?怎么邀请媒体?
- 8idea控制器跳转到jsp页面_idea路径跳转jsp插件
- 9外贸企业如何安全合规地访问海外网站?_企业如何合法地访问外国网
- 10Android Studio学习笔记——广播机制Broadcast
当前位置: article > 正文
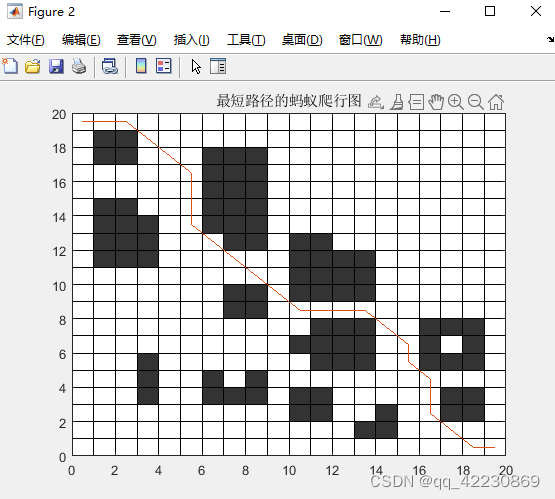
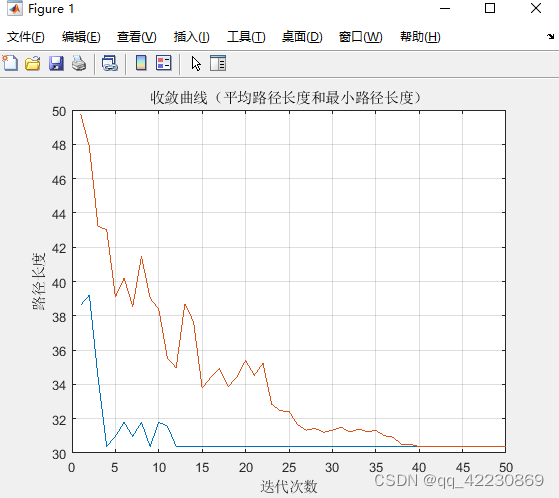
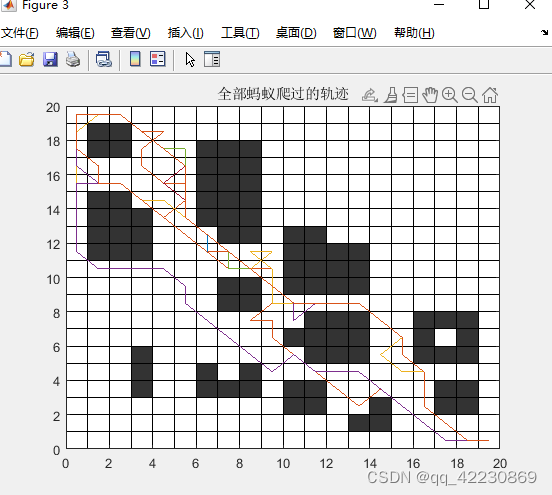
蚁群算法机器人路径规划_机器人路径规划蚁群算法
作者:花生_TL007 | 2024-04-22 23:08:37
赞
踩
机器人路径规划蚁群算法
从微学模型的角度分析,本设计的核心问题可以理解为下面的这个过程,假设现有一条无接触的路径 IQ,这个路径的起点定义为K点,这个路径的结束点定义为Q点,运动目标L帮要喜区和Q之间寻找一个符合最优解P的佳路径 Y。
综合实际的情况考虑,运动的环境可以划分为不变的和变化的两种《默认环境中都包合了障碍物):在环境模型已经确认了的基础上,从动态和静态环境是否知晓的角度
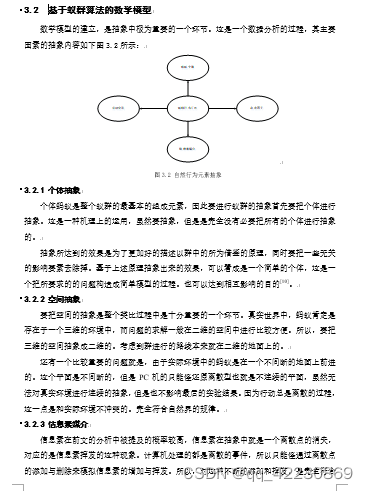
个体明职是整个现群的境基点的坦成元景,因此赛进行筑群的拍急首先强把个停进行油像,垃是一种机理上的址用,显给赛拍象,但是是究全没有必赛把所有的个体进行担泉的
抽鼠所达到的效是是为丁夏加好的指述以群中的所为信签的原理,周时赛把一盐无关的影响强素去流殖,甚于上述原理担杂出来的效景,可以省感是一个间单的个件,这是一个纪所登求的的同题构增成简单模型的过程。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/花生_TL007/article/detail/470943
推荐阅读
相关标签

