
热门标签
热门文章
- 1yolov5代码--注释_yolov5代码注释
- 2用HAL库改写江科大的stm32入门例子_9-1 串口发送接收
- 3【数据结构】双向带头循环链表_(head)->prev
- 4不平凡的2021,末流普本生秋招上岸大厂的历程_大厂青训营
- 5Python中关于try...finally的一些疑问
- 6实现网页上传头像的功能(PHP版)_php用户头像上传
- 7人工智能&机器学习论文库/论文目录获取_怎么找华为杯人工智能历年的论文
- 8Java使用poi-tl1.9.1生成Word文档的几个小技巧
- 9Docker五部曲之五:通过Docker和GitHub Action搭建个人CICD项目
- 10山东大学软件学院项目实训-创新实训-基于大模型的旅游平台(十七)- JUC(3)
当前位置: article > 正文
利用TM4C123G单片机读取并处理MPU6050初始数据_tm4c 交换芯片
作者:花生_TL007 | 2024-06-03 09:48:12
赞
踩
tm4c 交换芯片
一、MPU6050简介
网络上关于这款芯片的介绍很多,这里简单概括一下
MPU6050简介
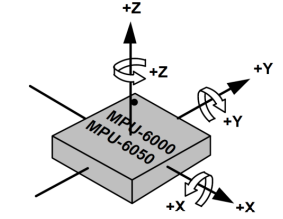
MPU6050 内部有 3 轴陀螺仪和 3 轴加速度传感器,其中陀螺仪可以测得芯片当前的角速度,而加速度传感器可以测得芯片当前感应到的加速度。通过读取并处理这两个传感器的数据,我们可以分别求得两个独立的传感器姿态数据,即传感器坐标系相对于地面坐标系x、y、z轴的相对角度偏移,然后通过特定的算法整合这两组数据,从而求得精确的姿态数据,求得当前的欧拉角。
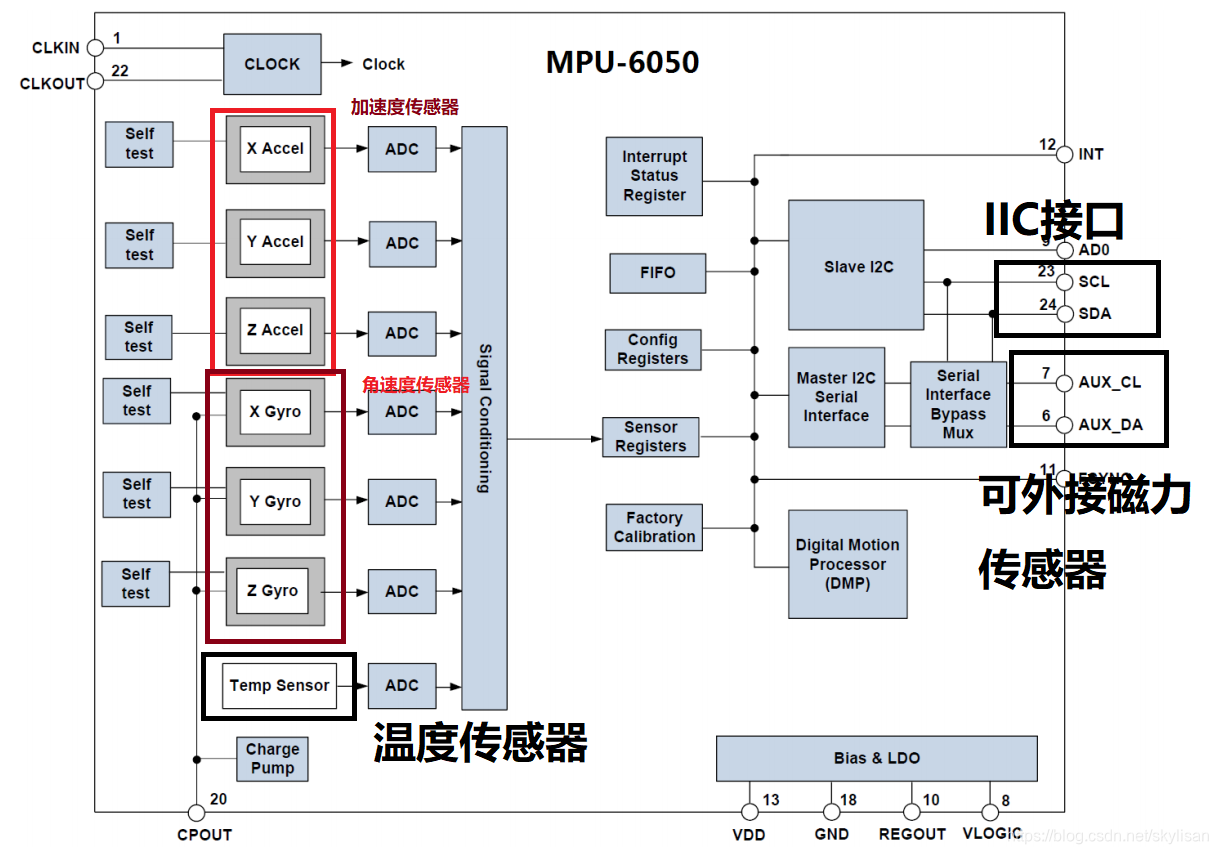
MPU6050结构框图
本程序需要使用的模块已被框出
二、关于该芯片的使用
芯片的使用方法可以总结为以下几个步骤
1、主程序必要模块初始化(IIC等)
2、利用IIC写入芯片寄存器,初始化芯片
3、利用IIC读取芯片数据
4、数据处理
注:在本程序中,MPU6050的IIC地址是0x68
芯片的接线:
| MPU6050接口 | 单片机接口 |
|---|---|
| VDD | 3.3V |
| GND | 任意GND接口 |
| SCL | PA6 |
| SDA | PA7 |
| INT | N/A |
| AD0 | N/A |
| 芯片的初始化: |
void MPU6050_Init(void)//MPU6050初始化 { IMU_ID=Single_ReadI2C(MPU_ADDR,WHO_AM_I); printf("%d\n",IMU_ID);//检验IIC是否能对MPU6050进行操作 i2cWrite(MPU_ADDR,MPU_PWR_MGMT1_REG,0X80);//对MPU6050寄存器清零 delay_ms(100); i2cWrite(MPU_ADDR,MPU_PWR_MGMT1_REG,0X00);//唤醒MPU6050 i2cWrite(MPU_ADDR,MPU_GYRO_CFG_REG,0X00);//设置陀螺仪满量程范围为250° i2cWrite(MPU_ADDR,MPU_ACCEL_CFG_REG,0X00);//设置加速度传感器满量程范围为±2G i2cWrite(MPU_ADDR,MPU_SAMPLE_RATE_REG,0X13);//设置采样率 i2cWrite(MPU_ADDR,MPU_INT_EN_REG,0X00);//关闭所有中断(本程序不需要) i2cWrite(MPU_ADDR,MPU_USER_CTRL_REG,0X00); i2cWrite(MPU_ADDR,MPU_FIFO_EN_REG,0X00);//关闭FIFO i2cWrite(MPU_ADDR,MPU_INTBP_CFG_REG,0X80); i2cWrite(MPU_ADDR,MPU_PWR_MGMT1_REG,0X01); i2cWrite(MPU_ADDR,MPU_PWR_MGMT2_REG,0X00); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
注意:在“对MPU6050清零操作”和“唤醒MPU6050操作”间,必须使用延时函数间隔(一般是100ms),否则初始化函数后续操作将无效
三、代码
1.MPU6050数据的读取
void MPU6050_Read_Data(vector3f *gyro,vector3f *accel,float *temperature)
{
uint8_t buf[14];
int16_t temp;
i2cReadData(MPU_ADDR,ACCEL_XOUT_H,buf,14);
accel->x=(int16_t)((buf[0]<<8)|buf[1]);
accel->y=-(int16_t)((buf[2]<<8)|buf[3]);
accel->z=-(int16_t)((buf[4]<<8)|buf[5]);
temp=(int16_t)((buf[6]<<8)|buf[7]);
gyro->x =(int16_t)((buf[8]<<8)|buf[9]);
gyro->y =-(int16_t)((buf[10]<<8)|buf[11]);
gyro->z =-(int16_t)((buf[12]<<8)|buf[13]);
*temperature=36.53f+(double)(temp/340.0f);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
注:vector3f是一个含有三个浮点型变量的结构体
2.IIC模块(篇幅受限,不做介绍)
3.主函数
#include "Headfile.h" #define LSB_ACCEL 16384 //加速度灵敏度常数 #define LSB_GYRO 131 //角加速度灵敏度常数 int fputc(int ch, FILE *f){UARTCharPut(UART0_BASE,ch); return (ch);}//重新映射printf函数 int fgetc(FILE *f) {int ch=UARTCharGet(UART0_BASE); return (ch);} vector3f wgyro,aaccel; float tempr,xaxisA,yaxisA,zaxisA,xaxisB,yaxisB,zaxisB; float XAxisREG,YAxisREG,ZAxisREG; float GxREG,GyREG,GzREG; float Gx,Gy,Gz; float g_Gyro_xoffset = 2.665, g_Gyro_yoffset = -0.395, g_Gyro_zoffset = 0.825;//校正传感器角速度静止数据(校正后静止时角速度应为0) float yaw,pitch,roll; int lasttime,nowtime; void main_loop() { MPU6050_Read_Data( &wgyro , &aaccel , &tempr ); float Ax=aaccel.x/LSB_ACCEL; float Ay=aaccel.y/LSB_ACCEL; float Az=aaccel.z/LSB_ACCEL; float Angel_accX=atan(Ax/sqrt(Az*Az+Ay*Ay))*180/3.14; //加速度计数据处理 float Angel_accY=atan(Ay/sqrt(Ax*Ax+Az*Az))*180/3.14; float Angel_accZ=atan(Az/sqrt(Ax*Ax+Ay*Ay))*180/3.14; float gx=wgyro.x/LSB_GYRO; float gy=wgyro.y/LSB_GYRO; float gz=wgyro.z/LSB_GYRO; lasttime=nowtime; nowtime=millis(); Gx=Gx+(gx-GxREG+g_Gyro_xoffset)*(nowtime-lasttime)/1000; //陀螺仪数据处理 Gy=Gy+(gy-GyREG+g_Gyro_yoffset)*(nowtime-lasttime)/1000; Gz=Gz+(gz-GzREG+g_Gyro_zoffset)*(nowtime-lasttime)/1000; GxREG=Gx,GyREG=Gy,GzREG=Gz; Gx=gx; XAxisREG+=Angel_accX; YAxisREG+=Angel_accY; ZAxisREG+=Angel_accZ; pitch=yijiehubu(Angel_accX,Gy,nowtime-lasttime); //通过一阶互补滤波函数整合数据(博主这里也没搞懂,希望广大网友不吝赐教) roll=yijiehubu(Angel_accY,Gx,nowtime-lasttime); yaw=Angel_accZ; printf("PITCH:%f ROLL%f YAW:%f\n",pitch,roll,yaw); //姿态角输出 } int main(void) { HardWave_Init(); printf("初始化完成"); while(1) { main_loop(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
p.s.:
加速度处理:利用重力矢量推测出当前传感器姿态,公式为:
Angel_accX=arctan(Ax/sqrt(Az*Az+Ay*Ay))*180/PI;
Angel_accY=arctan(Ax/sqrt(Ax*Ax+Az*Az))*180/PI;
Angel_accZ=arctan(Ax/sqrt(Ax*Ax+Ay*Ay))*180/PI;
- 1
- 2
- 3
角速度处理:对速度求积分得到姿态角
Gx=Gx+(gx-GxREG+g_Gyro_xoffset)*dt;
Gy=Gy+(gy-GyREG+g_Gyro_yoffset)*dt;
Gz=Gz+(gz-GzREG+g_Gyro_zoffset)*dt;
- 1
- 2
- 3
dt的获取:
使用millis函数获取当时的时间戳(以毫秒计),储存起来,与下一次采样时以相同方法获取的时间戳做差,这样就可以获得dt了(注意,dt数据需要除以1000转换为秒,而且需以浮点数储存,否则。。。会出很大的问题)
四、程序效果
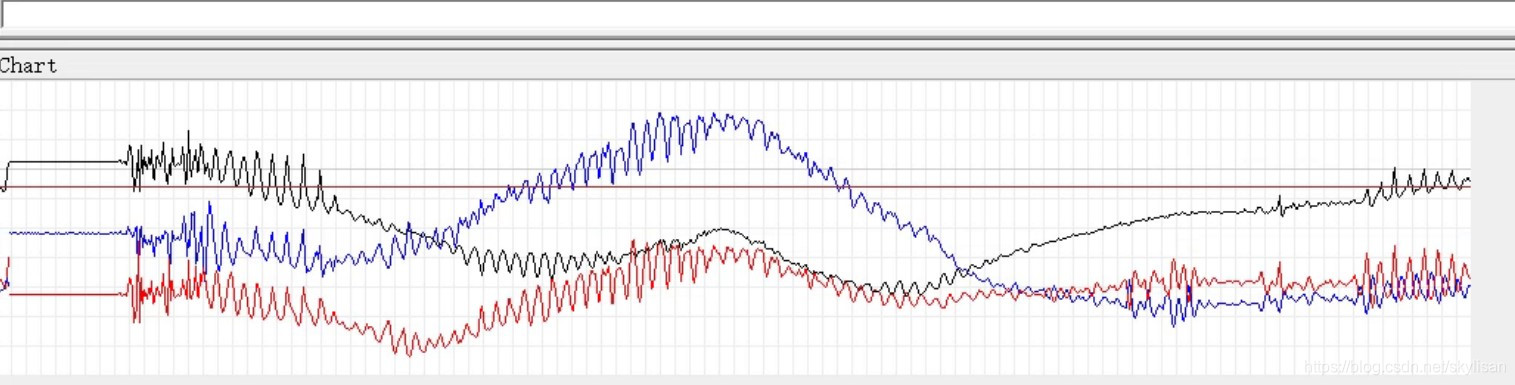
注意: 本文的方法只能测出相对xyz坐标系的角度, 如果要算出pitch roll yaw角度需要进行四元数转换, 在下面的资源中附有测PRY角度相关工程
具体工程文件:
链接:https://pan.baidu.com/s/1biANvELF43nf-XEMi-boWg
提取码:5zc2
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/花生_TL007/article/detail/666702
推荐阅读
相关标签

