- 1Python实现多任务
- 2java transactions数组_java里面Transaction transaction = (Transaction)(list.get(i));是什么意思...
- 3OS-鸿蒙系统-以及编译器_鸿蒙系统编译器
- 4纯血鸿蒙(HarmonyOS 3.1/4.0)入门教程 未完待续......
- 5Python+unittest+requests接口自动化测试框架搭建 完整的框架搭建过程_python接口自动化框架
- 6latex学习笔记——tikz画图 激活函数图像_latex画函数图像
- 7oracle中的row_number,oracle中rank() over与row_number()的区别
- 8如何删除github中已经被追踪的文件
- 9Windows10使用命令行打开3389_Winux之路-WSL 2的使用及填坑
- 10【unity知识点】Unity 协程/携程Coroutine_unity携程
基于open3D点云的SLAM系统教程
赞
踩
点云PCL免费知识星球,点云论文速读。
文章:Open3D SLAM: Point Cloud Based Mapping and Localization for Education
作者:Edo Jelavic, Julian Nubert, Marco Hutter, Robotic Systems Lab, ETH Zurich
编译:点云PCL
教程地址:https://open3d-slam.readthedocs.io/en/latest/system_overview.html#
欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。未经博主同意请勿擅自转载。
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
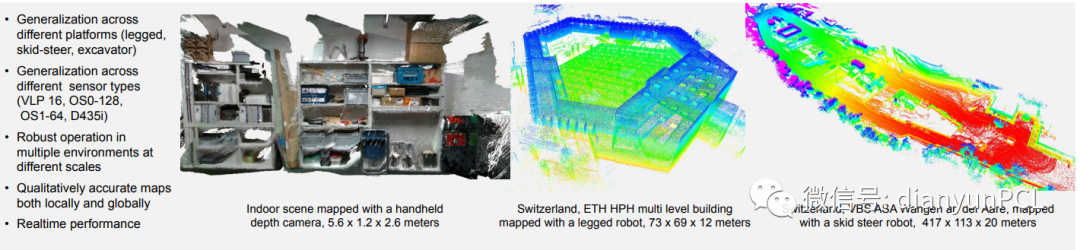
基于激光雷达SLAM系统已显示出卓越的性能和能力,可在从室内办公室到森林等大型自然环境的各种环境中运行,这种多功能性是通过多年的研究改进了SLAM系统模块,使其能够可靠实时的运行,然而,实现实时计算的代价是增加了复杂性和对点云表示的特定假设(例如LOAM及其变体)。这种额外的复杂性使得非专家或学生更难深入该领域,因为需要额外的知识来理解实现实时计算的算法。此外,由于SLAM性能高度依赖于实现质量,因此性能差异通常不是由底层算法本身造成的,而是由实现质量造成的。Open3D SLAM试图克服这些问题,研究使用基本形式的众所周知的算法来构建提出的基于激光雷达的SLAM系统,该系统利用了Open3D库,该库维护良好,性能良好,因此有助于提高实现质量。初步测试表明,在CPU上使用基本算法作为SLAM构建块是可行的,可以在从大型户外场景到小型办公环境的不同环境中构建高质量地图。使用部署在各种机器人平台上的不同激光传感器证明了所提出解决方案的通用性,作者希望使基于点云的SLAM更容易接受,从而促进教学,并使新一代制图研究人员更容易进入该领域。代码可在GitHub上获得:https://github.com/leggedrobotics/open3d_slam
主要内容
Open3D SLAM是一个基于点云的SLAM系统。它从各种传感器模式(如激光雷达或深度相机)获取点云,并生成全局一致的环境地图。下图给出了系统的概述:

扫描点云被发送到里程计模块,该模块根据扫描的原始点云以估计自身运动,里程计被用作扫描到地图优化的初始位姿,该优化估计自车运动并构建环境地图,将地图划分为子地图,open3d_ slam通过在不同子地图之间引入的约束来构建姿态图。主要分为三个部分:
扫描点云的匹配
使用ICP完成scan2scan和scan2map的匹配,具体教程查看:http://www.open3d.org/docs/latest/tutorial/Basic/icp_registration.html
回环识别
依赖RANSAC和FPFH功能,一旦子地图完成,将其与附近其他完成的子地图进行匹配(低漂移假设)。
位姿图优化
我们使用open3D的姿势图后端,进行优化地图,具体查看:http://www.open3d.org/docs/latest/tutorial/Advanced/multiway_registration.html
实验结果
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
如果你对本文感兴趣,请后台发送“知识星球”获取二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:微信“920177957”(需要按要求备注) 联系邮箱:dianyunpcl@163.com,欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶