
- 1【OpenCV入门教程之二】 一览众山小:OpenCV 2.4.8 or OpenCV 2.4.9组件结构全解析(转),opencv2.4.9_PHP教程
- 2【AR隔空手势交互】Unity中基于Manomotion实现隔空手势交互
- 3【unity插件】 DoTween动画插件的安装和使用整合(最全)_dotween插件
- 4Unity中人物移动的几种方式_unity人物移动
- 5结合OpenCV与TensorFlow进行人脸识别的实现
- 6【Unity3D日常BUG】Unity3D打包WEBGL平台运行出现无法解析gzip、构建压缩等问题
- 7深入了解Unity的Physics类:一份详细的技术指南(七)(上篇)
- 8.NET实现微信公共平台上传下载多媒体文件方法
- 9Unity导入项目中的模型都是紫色的_unity模型变成紫红色
- 10Html5游戏开发攻略(API篇)
UnityVR--机械臂场景8-三自由度逆向解算3-应用在ABB机械臂_三自由度机械臂
赞
踩
目录
前文已经在Unity中,将3自由度机械臂的数学模型实现出来了,现在我们将它实际应用于机械臂中。选用的机械臂3D模型是ABB IRB 4600工业机器人,来自AssetStore。


(图片来自ABB官网)
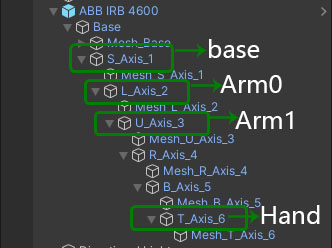
1. ABB机械臂形态
模型中总共有六个旋转轴,为了继承上一章内容和分析方法,仅使用其中的3个自由度。

2. ABB机械臂数学模型分析
但是与上一章的数学模型不同的是,这里的base和Arm0两个节点坐标不同,因此在上一章的基础上,需要分两步来考虑:
第一步:以base为原点来计算θ3,这一步与上一章相同;

![]()
![]() 或者θ3=arctan(x/z)
或者θ3=arctan(x/z)
第二步:以Arm0为原点计算θ1和θ2。
这里用二维图作示意,将坐标轴偏移一个距离,这时候Target的坐标变成了与Arm0节点的差值(x',y',z')
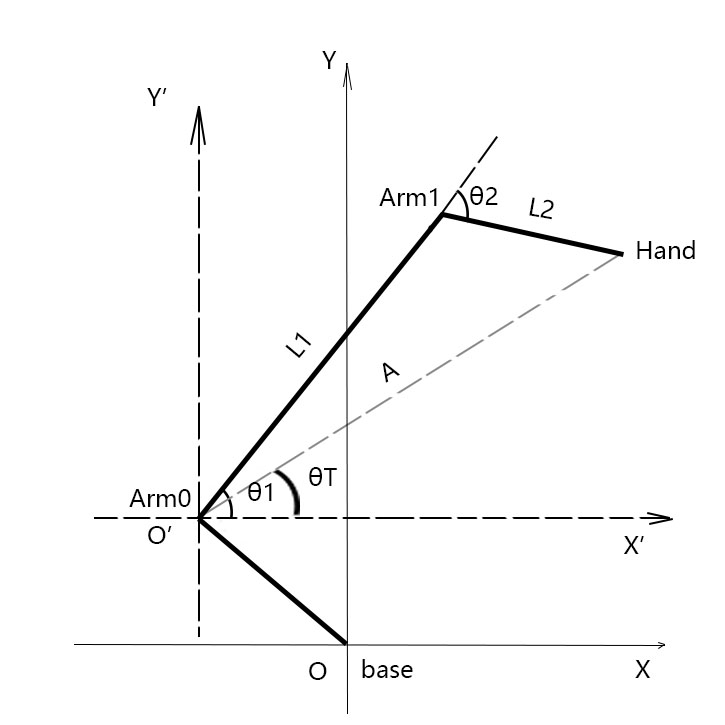
按照上一章的计算方式,重新计算W‘、A'、θT、θ2、θ1:

![]()
![]()
![]()
![]()
![]()
3. 初步程序实现
1. 准备工作:首先要拿到上述计算需要用到的变量:
- public Transform Base,Arm0,Arm1,Hand,Target;
- float X, Y, Z; //记录目标Target的位置,相对于Base
- float x_plus, y_plus, z_plus; //Target的位置,相对于Arm0
- private float L1,L2;
- private float sita_1, sita_2, sita_3, sita_T, W, A;
2. 准备工作:计算出L1、L2的值,这是固定不变的
- L1 = Vector3.Distance(Arm0.position, Arm1.position);
- L2 = Vector3.Distance(Arm1.position, Hand.position);
3. 先在以base为原点的坐标系中计算出θ3,套公式:
- X = Target.position.x - Base.transform.position.x;
- Y = Target.position.y - Base.transform.position.y;
- Z = Target.position.z - Base.transform.position.z;
- sita_3 = Mathf.Atan2(X, Z);
- sita_3 = Mathf.Rad2Deg * sita_3;
4. 再以Arm0为原点,计算x',y',z',W‘、A'、θT、θ2、θ1,套公式:
- x_plus = Target.position.x - Arm0.position.x;
- y_plus = Target.position.y - Arm0.position.y;
- z_plus = Target.position.z - Arm0.position.z;
- W = Mathf.Sqrt(square(x_plus) + square(z_plus));
- A = Mathf.Sqrt(square(W) + square(y_plus));
- sita_T = Mathf.Acos(W / A);
- sita_1 = Mathf.Acos((square(L1) + square(W) + square(y_plus) - square(L2)) / (2 * L1 * A)) + sita_T;
- sita_2 = Mathf.Acos((square(W) + square(y_plus) - square(L1) - square(L2)) / (2 * L1 * L2));
- sita_1 *= Mathf.Rad2Deg;
- sita_2 *= Mathf.Rad2Deg;
好了,运行试试看:
结果中可以看到,虽然机械臂随着Target移动,但是却有一定的误差:Target和手爪之间错位了一段距离。这是为什么呢?下面分析一下误差产生的原因。
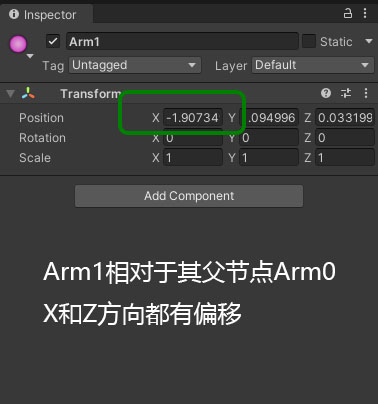
4. 误差分析
将这几个旋转节点单独拿出来观察,从XY平面来看,在机械臂的初始状态,Arm0到Arm1,以及Arm1到Hand,并不是完全地与Y轴平行的,XZ平面也是如此。这一点从Arm0和Arm1的本地坐标上也能看出来。但上述数学模型是简化了的,没有考虑到这些问题。

因此,在一开始还需要计算出初始角度,并在之后实际旋转时减去。sita_L1和sita_L2分别是两条手臂L1和L2的初始偏移角度。
- sita_L1 =(Mathf.Asin(Arm1.localPosition.x / L1))*Mathf.Rad2Deg;
- var temp = Hand.position.x - Arm1.position.x;
- sita_L2=(Mathf.Asin(temp/ L2)) * Mathf.Rad2Deg;
5. 最终实现
完整代码如下:
- public Transform Base,Arm0,Arm1,Hand,Target;
- private float L1,L2;
- private float sita_L1, sita_L2;//L1、L2初始位置的偏移角
- private float[] moveAngle;
-
- void Start()
- { //在ABB机械臂中,L1改成(S_Axis_2)到Arm1节点(U_Axis_3)的距离
- L1 = Vector3.Distance(Arm0.position, Arm1.position);
- L2 = Vector3.Distance(Arm1.position, Hand.position);
-
- sita_L1 =(Mathf.Asin(Arm1.localPosition.x / L1))*Mathf.Rad2Deg;
- var temp = Hand.position.x - Arm1.position.x;
- sita_L2=(Mathf.Asin(temp/ L2)) * Mathf.Rad2Deg;
- }
-
- void Update()
- {
- moveAngle=IKCaculator(Target,moveAngle);
-
- Vector3 euler0 = Base.transform.localEulerAngles;
- euler0.y = moveAngle[0];
- //插值旋转举例
- Base.localRotation = Quaternion.Slerp(Base.localRotation, Quaternion.Euler(Euler0), 0.9f * Time.deltaTime);
- if (Quaternion.Angle(Base.localRotation, Quaternion.Euler(Euler0)) < 0.5f)
- Base.transform.localEulerAngles = Euler0;
-
- Vector3 euler1 = Arm0.transform.localEulerAngles;
- euler1.z = moveAngle[1];
- Arm0.localEulerAngles = euler1;
-
- Vector3 euler2 = Arm1.transform.localEulerAngles;
- euler2.z =moveAngle[2];
- Arm1.localEulerAngles = euler2;
-
- }
-
- float[] IKCaculator(Transform target,float[] Scara)
- {
- float sita_1, sita_2, sita_3, sita_T, X, Y, Z, W, A,x_plus,y_plus,z_plus;
- //计算目标Target和第一个关节Base距离的三个分量X、Y、Z
- X = target.position.x - Base.transform.position.x;
- Y = target.position.y - Base.transform.position.y;
- Z = target.position.z - Base.transform.position.z;
- //计算目标Target和Arm0距离的三个分量x_plus、y_plus、z_plus
- x_plus = target.position.x - Arm0.position.x;
- y_plus = target.position.y - Arm0.position.y;
- z_plus = target.position.z - Arm0.position.z;
- //计算W和A,在图中为W'和A'
- W = Mathf.Sqrt(square(x_plus) + square(z_plus));
- A = Mathf.Sqrt(square(W) + square(y_plus)); //A的长度=根号(W平方+Y平方)
- sita_T = Mathf.Acos(W / A); //辅助角T
- sita_1 = Mathf.Acos((square(L1) + square(W) + square(y_plus) - square(L2)) / (2 * L1 * A)) + sita_T;
- sita_2 = Mathf.Acos((square(W) + square(y_plus) - square(L1) - square(L2)) / (2 * L1 * L2));
- sita_3 = Mathf.Atan2(X, Z);
-
- sita_1 *= Mathf.Rad2Deg;
- sita_2 *= Mathf.Rad2Deg;
- sita_3 *= Mathf.Rad2Deg;
-
- Scara[0] = sita_3-90; //ABB机械臂的误差排除
- Scara[1] =-(90- sita_1+sita_L1);
- Scara[2] = -(sita_2-sita_L2);
- return Scara;
- }
-
- static float square(float f)
- {
- return f * f;
- }

或者在旋转时加入球形插值,让它转得丝滑一些。
- 文章浏览阅读1k次。区别在于,Asset是在编辑器中管理和引用的资源,而Resource是在运行时动态加载的资源。Unity采用的方案明显是第二种,它会对Assets文件夹下的所有文件生成一个名称相同,扩展名为meta的文件,包括文件夹也会... [详细]
赞
踩
 文章浏览阅读1.3k次,点赞30次,收藏31次。Post-Processing是一块内容很多知识,想要学习好这块简单大家还是多去网上查阅资料。因为博客嘛,整理简单的东西还可以,太复杂了就显得不够用了。我会整理我学习的步骤给大家,大家也去看看... [详细]
文章浏览阅读1.3k次,点赞30次,收藏31次。Post-Processing是一块内容很多知识,想要学习好这块简单大家还是多去网上查阅资料。因为博客嘛,整理简单的东西还可以,太复杂了就显得不够用了。我会整理我学习的步骤给大家,大家也去看看... [详细]赞
踩
- 文章浏览阅读4.1k次,点赞83次,收藏87次。本文将使用ShaderGraph制作一个根据坐标控制溶解的位置,物体靠近局部溶解的效果,可以直接拿到项目中使用。下面就开始看一下具体的制作流程,然后自己动手制作一个吧!【UnityShader... [详细]
赞
踩
- 文章浏览阅读601次。[游戏开发][Unity]Xlua生成wrap文件报错、打AB包Wrap报错[游戏开发][Unity]Xlua生成wrap文件报错、打AB包Wrap报错 Xlua生成wrap文件,自带添加了ref字段报错例如... [详细]
赞
踩
- 文章浏览阅读972次,点赞44次,收藏50次。Unity的多语言本地化是一个很实用的功能,它可以帮助游戏支持多种语言,让不同语言的玩家都能够更好地体验游戏。而实现本地化的方案也有很多种,各个方案之间也各有优劣,后面也会对多个方案进行介绍学习... [详细]
赞
踩
- 文章浏览阅读2.6k次,点赞4次,收藏14次。UnityMetaQuest混合现实MR透视Passthrough开发环境配置_unityvrunityvr文章目录... [详细]
赞
踩
- 文章浏览阅读4.1k次,点赞36次,收藏96次。ShaderGraph是Unity中的一个可视化工具,用于创建和编辑图形着色器。其意义在于简化编写复杂着色器的过程,减少对具体编程语言的依赖,使艺术家和设计师可以更方便地创建各种美术效果。使用... [详细]
赞
踩
- 文章浏览阅读1.1w次,点赞17次,收藏77次。unity新手向:通过实例化实现简单的射击功能。_unity3d发射子弹unity3d发射子弹前言:对于射击类游戏,相信大家并不陌生。那么想要实现这一功能,我们通常会使用两种方法:1.射线追踪... [详细]
赞
踩
 文章浏览阅读2k次,点赞4次,收藏6次。ThreadPool中有若干数量的线程,如果有任务需要处理时,会从线程池中获取一个空闲的线程来执行任务,任务执行完毕后线程不会销毁,而是被线程池回收以供后续任务使用。当线程池中所有的线程都在忙碌时,又... [详细]
文章浏览阅读2k次,点赞4次,收藏6次。ThreadPool中有若干数量的线程,如果有任务需要处理时,会从线程池中获取一个空闲的线程来执行任务,任务执行完毕后线程不会销毁,而是被线程池回收以供后续任务使用。当线程池中所有的线程都在忙碌时,又... [详细]赞
踩
- 文章浏览阅读1.2k次,点赞3次,收藏4次。如何通过环信IMSDK实现用户管理、好友系统(联系人管理)及聊天消息管理功能。_环信im环信im文章目录... [详细]
赞
踩
- 文章浏览阅读4.2k次,点赞36次,收藏96次。ShaderGraph是Unity中的一个可视化工具,用于创建和编辑图形着色器。其意义在于简化编写复杂着色器的过程,减少对具体编程语言的依赖,使艺术家和设计师可以更方便地创建各种美术效果。使用... [详细]
赞
踩
- 文章浏览阅读1.4k次。在Unity中,UI缩放模式定义了UI元素在屏幕上的缩放方式。Unity提供了三种UI缩放模式:ConstantPixelSize(固定像素大小)、ScaleWithScreenSize(按屏幕大小缩放)和Const... [详细]
赞
踩
 文章浏览阅读5k次,点赞11次,收藏42次。上面设置的值表示,当粒子效果数量达到100以后,它就会为了保护计算机,当前面一波的粒子效果消失之后,才会去进行下一波的粒子效果的显示,这是一种保护性能、设置上限的方法,也是一种保护性能‘设置上限的... [详细]
文章浏览阅读5k次,点赞11次,收藏42次。上面设置的值表示,当粒子效果数量达到100以后,它就会为了保护计算机,当前面一波的粒子效果消失之后,才会去进行下一波的粒子效果的显示,这是一种保护性能、设置上限的方法,也是一种保护性能‘设置上限的... [详细]赞
踩
 众所周知,工欲善其事必先利其器,有一个好的工具可以让我们事半功倍,有一个好用的网站更是如此!但是好用的网站真的太多了,收藏夹都满满的(但是几乎没打开用过unity学习网站Unity相关网站整理大全众所周知,工欲善其事必先利其器,有一个好的工... [详细]
众所周知,工欲善其事必先利其器,有一个好的工具可以让我们事半功倍,有一个好用的网站更是如此!但是好用的网站真的太多了,收藏夹都满满的(但是几乎没打开用过unity学习网站Unity相关网站整理大全众所周知,工欲善其事必先利其器,有一个好的工... [详细]赞
踩
 (1)熟悉Unity中UI界面的设计与编写;(2)熟悉UI界面中场景转换,UI与场景内容相互关联的方式。(3)熟悉Unity中MySQL数据库的操作新建一个Unity场景,在此场景中实现如下功能:(1)自行设计一个登录、注册UI界面;(2)... [详细]
(1)熟悉Unity中UI界面的设计与编写;(2)熟悉UI界面中场景转换,UI与场景内容相互关联的方式。(3)熟悉Unity中MySQL数据库的操作新建一个Unity场景,在此场景中实现如下功能:(1)自行设计一个登录、注册UI界面;(2)... [详细]赞
踩
 unity如何生成exe文件_unity导出exeunity导出exe场景:unity如何生成exe文件方法在Unity中,可以通过以下步骤生成exe文件:在Unity界面中,点击菜单栏的“File”,选择“BuildSettings”。在... [详细]
unity如何生成exe文件_unity导出exeunity导出exe场景:unity如何生成exe文件方法在Unity中,可以通过以下步骤生成exe文件:在Unity界面中,点击菜单栏的“File”,选择“BuildSettings”。在... [详细]赞
踩
- 本人是在学习完c,c++,数据结构算法,操作系统网络这些基础的课程之后,打算学习自己喜欢的游戏开发方向的东西,然后在B站上自学了几天unity,用到unity的触发器,碰撞,刚体,以及一个简单的ui界面,但是本人目前没有c#的学习经验,但是... [详细]
赞
踩
- Unity——在C#中调用C++动态链接库(DLL)。打开VS,新建一个C++空项目,自命名项目名称与位置。如果Unity已经在运行并且Dll已经存在,那么新的Dll写入生成会失败,此时需要关掉Unity再重新生成。_unity调用c++动... [详细]
赞
踩
- 最近有个Holoens2识别灭火器实体交互的项目,大概有2-3年没有搞MR的项目了,重新看一下,以前没有记录的习惯,现在慢慢培养一下。小Dome链接:link好记性不如烂笔头!unity使用Vuforia扫描实体物体交互文章目录前言一、Vu... [详细]
赞
踩
- 记录风格化水的实现过程_unity水体shaderunity水体shader写在前面长文警告!!!!!很久没更新博客了,,这次是要做一个风格化水效果,是基于Plane着色实现水面效果。项目:Unity2017.4.40f1Build-in,... [详细]
赞
踩

