
- 1测试工具 -Jmeter使用大全_jmeter怎么用
- 2WINDOWS API函数说明_wnetaddconnection2函数在无桌面的server上使用
- 3016-zabbix低级自动发现以及MySQL多实例
- 4【大模型】LLM显存占用对比:Qwen-7B-Chat,Qwen-14B-Chat-Int8,chatglm3-6b_qwen7b微调显存
- 5PaddleDetection系列1--paddlepaddle安装及测试_paddledetection安装
- 6深入浅出Java虚拟机,从来没有人能把Java 虚拟机讲解的这么透彻_深入理解java虚拟机
- 7c# winformQQ自动回复机器人,可以自定义回复话术_wpf移自动问答机器人
- 8远程服务调用的几种方式_远程调用
- 9Ubuntu开机自启动设置/docker开机自启_ubuntu开机启动
- 10启动zookeeper集群失败解决_zk节点启动无法加入集群
【智能家居入门之环境信息监测】(STM32、ONENET云平台、微信小程序、HTTP协议)
赞
踩
作为入门本篇只实现微信小程序接收下位机上传的数据,之后会持续发布如下项目:①可以实现微信小程序控制下位机动作,真正意义上的智能家居;②将网络通讯协议换成MQTT协议再实现上述功能,此时的服务器也不再是ONENET,可以是公用的MQTT服务器也可以自己搭建或者租
这个项目参考的是b站up主:彼岸有光我们有船
最终效果
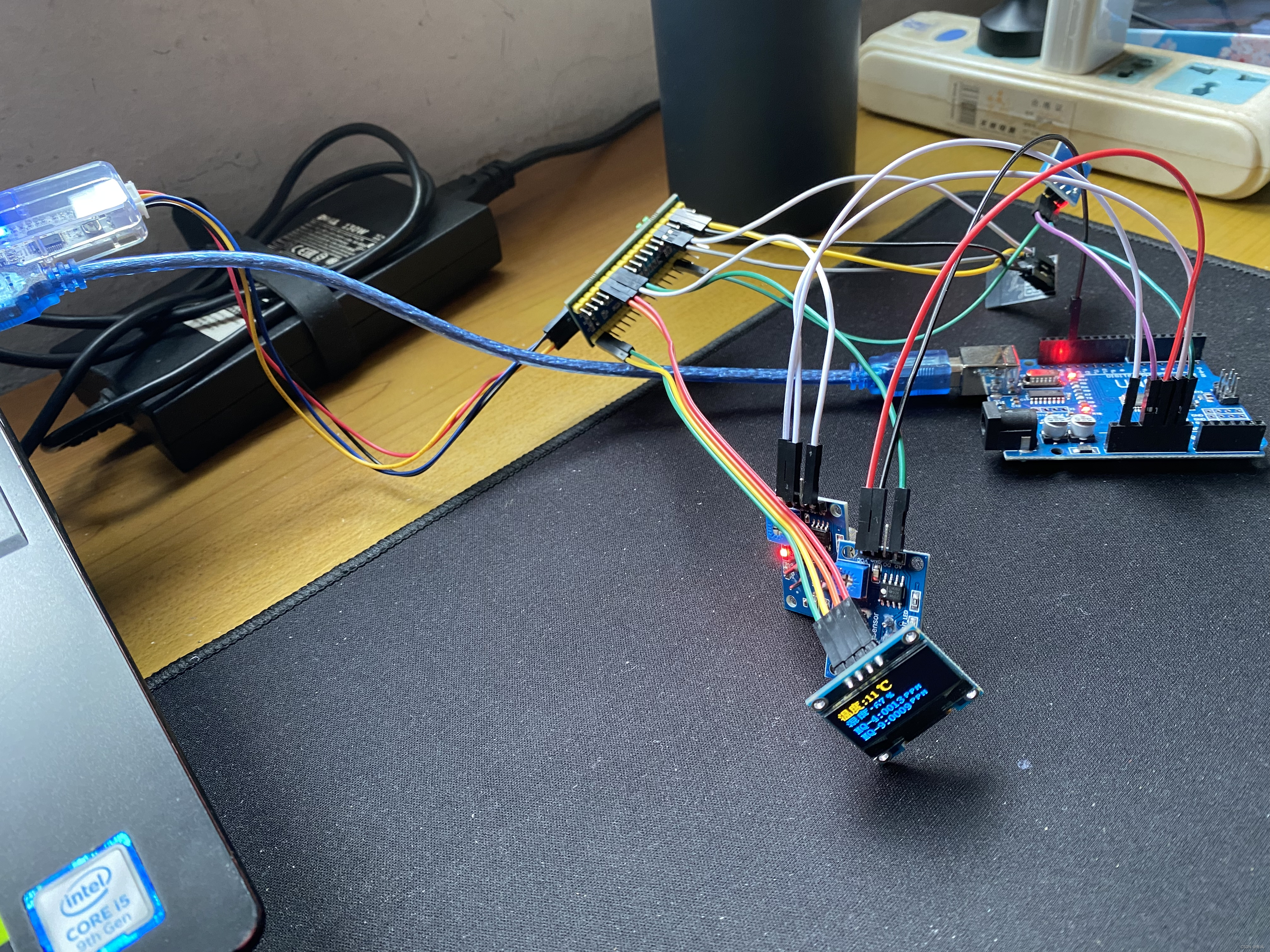
实物图:
主控是STM32F103C8T6,这里arduino开发板我只是拿来给几个模块供电的,有面包板的话也可以用面包板,用到的模块有:MQ-4天然气传感器、MQ-9可燃气体传感器、0.96寸oled液晶屏、DHT11温湿度传感器、Esp8266-01s、J-Link下载器。
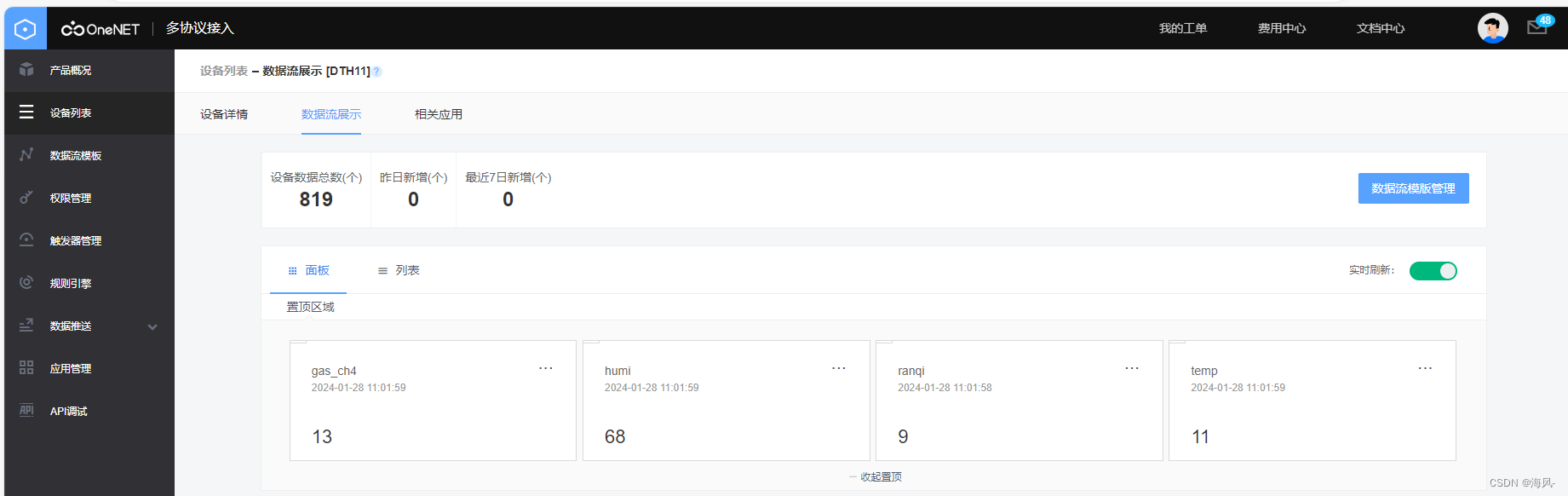
ONENET云平台:
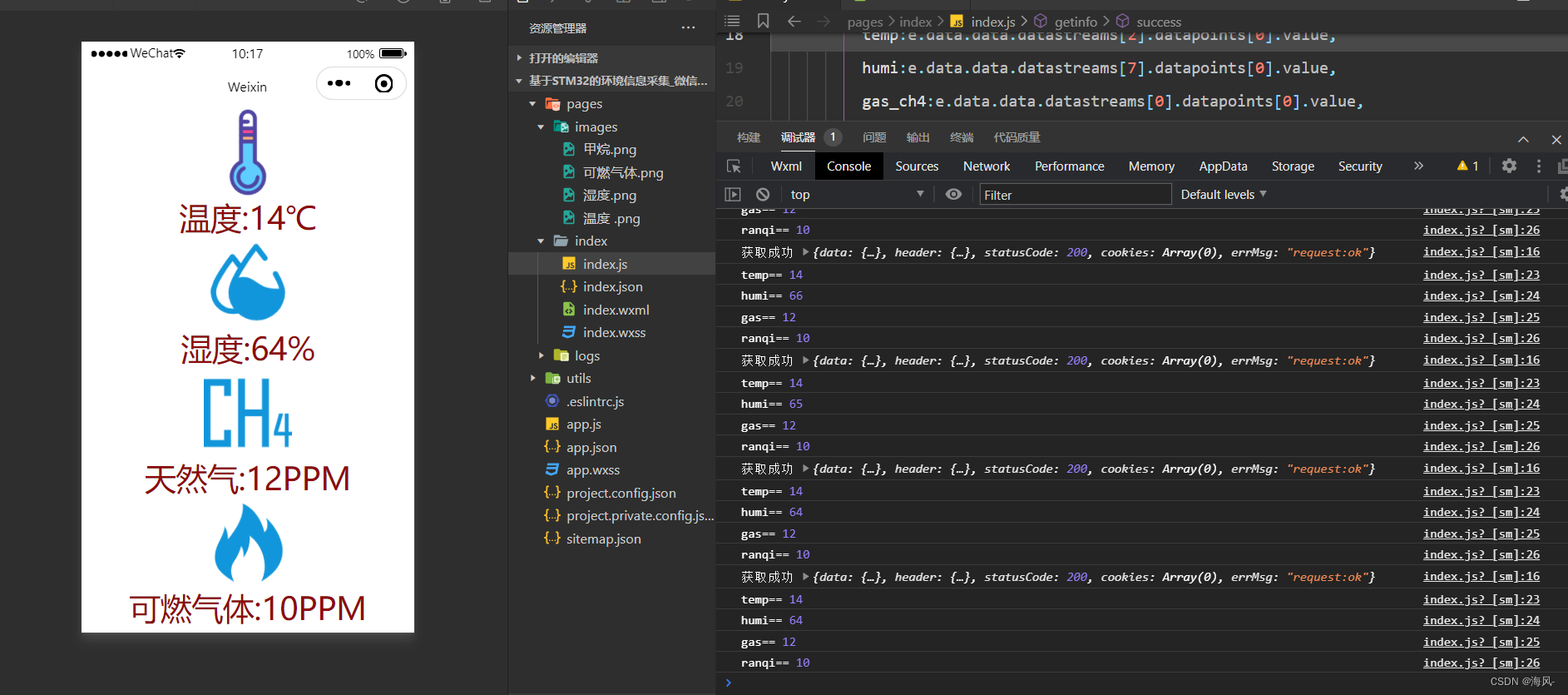
微信小程序:
一、下位机模块测试与分析
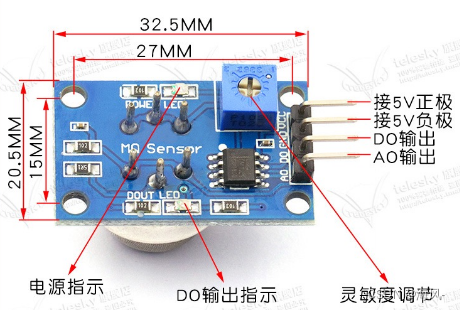
1、MQ系列传感器
MQ气体传感器使用的气敏材料是在清洁空气中电导率较低的二氧化锡。当传感器所处环境中存在可燃气体时,传感器的电导率随空气中可燃气体浓度的增加而增大。使用简单的电路即可将电导率的变化转换为与该气体浓度相对应的输出信号。MQ气体传感器对甲烷的灵敏度高,对丙烷、丁烷也有较好的灵敏度。这种传感器可检测多种可燃性气体,特别是天然气。
关于这个传感器的详细资料可以下载阅读:我用夸克网盘分享了「MQ-2-135-3-7-9烟雾空气敏酒精氢一氧化碳可燃液化传感器模块探头.rar」,点击链接即可保存。打开「夸克APP」,无需下载在线播放视频,畅享原画5倍速,支持电视投屏。
链接:https://pan.quark.cn/s/22c08247dd8a
提取码:xLRC
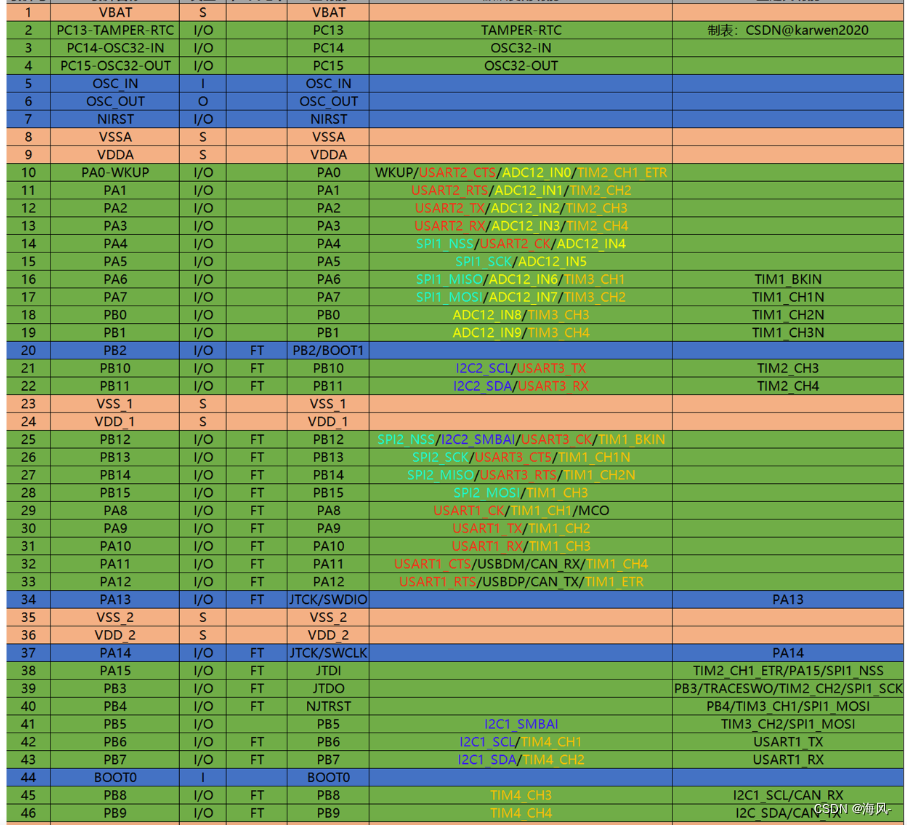
在这个项目中只需要接三个引脚:VCC、GND、AO。AO输出接开发板的IO口,通过ADC将传感器的模拟输出转换成数字量。这里用到了开发板上ADC1的通道2、3,对应GPIOA-2、GPIOA-3。 关于 ADC的使用可以直接看视频:
https://www.bilibili.com/video/BV1th411z7sn/?p=21&spm_id_from=pageDriver&vd_source=2a10d30b8351190ea06d85c5d0bfcb2a
下面是多通道ADC源码,如果想再加的话只需要在初始化gpio的时候加上需要的io口即可,但是需要对应io口与adc通道的对应关系:
#include "stm32f10x.h" // Device header void AD_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; ADC_InitTypeDef ADC_InitStructure; //定义结构体变量 /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); //开启ADC1的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟 /*设置ADC时钟*/ RCC_ADCCLKConfig(RCC_PCLK2_Div6); //选择时钟6分频,ADCCLK = 72MHz / 6 = 12MHz /*GPIO初始化*/ GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0、PA1、PA2和PA3引脚初始化为模拟输入 /*不在此处配置规则组序列,而是在每次AD转换前配置,这样可以灵活更改AD转换的通道*/ /*ADC初始化*/ ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //模式,选择独立模式,即单独使用ADC1 ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐,选择右对齐 ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发,使用软件触发,不需要外部触发 ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //连续转换,失能,每转换一次规则组序列后停止 ADC_InitStructure.ADC_ScanConvMode = DISABLE; //扫描模式,失能,只转换规则组的序列1这一个位置 ADC_InitStructure.ADC_NbrOfChannel = 1; //通道数,为1,仅在扫描模式下,才需要指定大于1的数,在非扫描模式下,只能是1 ADC_Init(ADC1, &ADC_InitStructure); //将结构体变量交给ADC_Init,配置ADC1 /*ADC使能*/ ADC_Cmd(ADC1, ENABLE); //使能ADC1,ADC开始运行 /*ADC校准*/ ADC_ResetCalibration(ADC1); //固定流程,内部有电路会自动执行校准 while (ADC_GetResetCalibrationStatus(ADC1) == SET); ADC_StartCalibration(ADC1); while (ADC_GetCalibrationStatus(ADC1) == SET); } /** * 函 数:获取AD转换的值 * 参 数:ADC_Channel 指定AD转换的通道,范围:ADC_Channel_x,其中x可以是0/1/2/3 * 返 回 值:AD转换的值,范围:0~4095 */ uint16_t AD_GetValue(uint8_t ADC_Channel) { ADC_RegularChannelConfig(ADC1, ADC_Channel, 1, ADC_SampleTime_55Cycles5); //在每次转换前,根据函数形参灵活更改规则组的通道1 ADC_SoftwareStartConvCmd(ADC1, ENABLE); //软件触发AD转换一次 while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); //等待EOC标志位,即等待AD转换结束 return ADC_GetConversionValue(ADC1); //读数据寄存器,得到AD转换的结果 }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
2、DHT11温湿度传感器
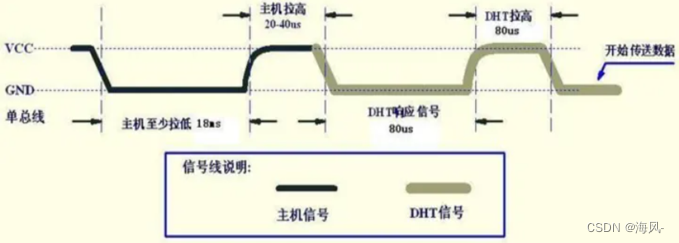
1、DHT11 采用单总线协议与单片机通信,概括起来是两个大过程:配对和数据传输,下面对两个过程进行分析:
①配对过程
(1)Data引脚在默认状态时处于高电平;
(2)在开始通信时,MCU将Data引脚拉低并保持18ms,然后再将Data引脚拉高20-40us;
(3)当DHT11收到命令后,它会主动拉低Data引脚,持续80us;
(4)DHT11再次拉高DATA引脚,80us后开始发送数据给MCU。
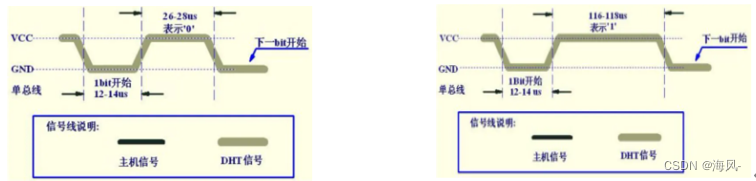
②数据传输
(1)在每次发送数据之前,DHT11会把Data引脚先拉低50us,这表示单片机要继续发送下一位数据;
(2)DHT11拉高Data引脚,如果拉高持续时间是26-28us,表示发送0;如果拉高的持续时间是116-118us,表示发送1。
2、驱动代码:
①c文件:
#include "dht11.h" #include "delay.h" //复位DHT11 void DHT11_Rst(void) { DHT11_IO_OUT(); //SET OUTPUT DHT11_DQ_OUT=0; //拉低DQ delay_ms(20); //拉低至少18ms DHT11_DQ_OUT=1; //DQ=1 delay_us(30); //主机拉高20~40us } //等待DHT11的回应 //返回1:未检测到DHT11的存在 //返回0:存在 u8 DHT11_Check(void) { u8 retry=0; DHT11_IO_IN();//SET INPUT while (DHT11_DQ_IN&&retry<100)//DHT11会拉低40~80us { retry++; delay_us(1); }; if(retry>=100)return 1; else retry=0; while (!DHT11_DQ_IN&&retry<100)//DHT11拉低后会再次拉高40~80us { retry++; delay_us(1); }; if(retry>=100)return 1; return 0; } //从DHT11读取一个位 //返回值:1/0 u8 DHT11_Read_Bit(void) { u8 retry=0; while(DHT11_DQ_IN&&retry<100)//等待变为低电平 { retry++; delay_us(1); } retry=0; while(!DHT11_DQ_IN&&retry<100)//等待变高电平 { retry++; delay_us(1); } delay_us(40);//等待40us if(DHT11_DQ_IN)return 1; else return 0; } //从DHT11读取一个字节 //返回值:读到的数据 u8 DHT11_Read_Byte(void) { u8 i,dat; dat=0; for (i=0;i<8;i++) { dat<<=1; dat|=DHT11_Read_Bit(); } return dat; } //从DHT11读取一次数据 //temp:温度值(范围:0~50°) //humi:湿度值(范围:20%~90%) //返回值:0,正常;1,读取失败 u8 DHT11_Read_Data(u8 *temp,u8 *humi) { u8 buf[5]; u8 i; DHT11_Rst(); if(DHT11_Check()==0) { for(i=0;i<5;i++)//读取40位数据 { buf[i]=DHT11_Read_Byte(); } if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4]) { *humi=buf[0]; *temp=buf[2]; } }else return 1; return 0; } //初始化DHT11的IO口 DQ 同时检测DHT11的存在 //返回1:不存在 //返回0:存在 u8 DHT11_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA端口时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //PA0端口配置 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO口 GPIO_SetBits(GPIOA,GPIO_Pin_8); //PA0 输出高 DHT11_Rst(); //复位DHT11 return DHT11_Check();//等待DHT11的回应 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
②头文件:
#ifndef __DHT11_H #define __DHT11_H #include "sys.h" //IO方向设置 #define DHT11_IO_IN() {GPIOA->CRH&=0XFFFFFFF0;GPIOA->CRH|=8;} #define DHT11_IO_OUT() {GPIOA->CRH&=0XFFFFFFF0;GPIOA->CRH|=3;} IO操作函数 #define DHT11_DQ_OUT PAout(8) //数据端口 PA0出方向 #define DHT11_DQ_IN PAin(8) //数据端口 PA0入方向 u8 DHT11_Init(void);//初始化DHT11 u8 DHT11_Read_Data(u8 *temp,u8 *humi);//读取温湿度 u8 DHT11_Read_Byte(void);//读出一个字节 u8 DHT11_Read_Bit(void);//读出一个位 u8 DHT11_Check(void);//检测是否存在DHT11 void DHT11_Rst(void);//复位DHT11 #endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
主函数中直接调用DHT11_Read_Data,定义两个变量接收即可。
3、Esp8266-01s
在使用单片机连接此模块前最好先进行测试,测试可以参考之前的一篇博客(这篇博客还有如何在ONENET云平台创建产品和设备):https://blog.csdn.net/m0_71523511/article/details/135887108
驱动代码:
#include "esp8266.h" char *str[4] = {"POST /devices/1038xxxxxxxx/datapoints HTTP/1.1", "api-key:wfsF4bCGtQIQmW=xxxxxxxx", "Host:api.heclouds.com", ""}; char strValue[8] = {0}; // 向onenet发送数据 u8 *esp8266_str_data(char *key, char *value) { u8 i; u8 *back; char temp[512]; char temp3[64]; // 长度 char temp5[128]; // 发送值 // 拼接post报文 strcpy(temp5, "{\"datastreams\":[{\"id\":\""); strcat(temp5, key); strcat(temp5, "\",\"datapoints\":[{\"value\":"); strcat(temp5, value); strcat(temp5, "}]}]}"); strcpy(temp3, "Content-Length:"); sprintf(temp, "%d", strlen(temp5) + 1); strcat(temp3, temp); strcpy(temp, ""); for (i = 0; i < 3; i++) { strcat(temp, str[i]); strcat(temp, "\r\n"); } strcat(temp, temp3); strcat(temp, "\r\n\r\n"); strcat(temp, temp5); strcat(temp, "\r\n"); back = esp8266_send_data((u8 *)temp, 50); // printf("server:%s\r\n", back); if (strstr((char *)back, "ERROR")) //发送失败, 重新初始化,发送 { esp8266_send_cmd("AT+RST", "OK", 50); esp8266_send_cmd("AT+CIPCLOSE", "OK", 50); esp8266_send_cmd("AT+CWMODE=1", "OK", 50); esp8266_send_cmd("AT+CWDHCP=1", "OK", 50); //esp8266_send_cmd("AT+CIPMUX=0", "OK", 50); while (esp8266_send_cmd("AT+CIPSTART=\"TCP\",\"183.230.40.33\",80", "CONNECT", 100)); //esp8266_send_cmd("AT+CIPMODE=1", "OK", 50); //esp8266_send_cmd("AT+CIPSEND", "OK", 20); return esp8266_send_data((u8 *)temp, 50); } return back; } // 向esp8266请求数据 u16 esp8266_get_data(char *vStr) { u8 i; u16 value = 0; char *back; char temp[160] = "GET /devices/1038269453/datastreams/"; // 拼接请求报文 strcat(temp, vStr); strcat(temp, " HTTP/1.1\r\n"); for (i = 1; i < 4; i++) { strcat(temp, str[i]); strcat(temp, "\r\n"); } // 发送报文, 获取返回字符串 back = (char *)esp8266_send_data((u8 *)temp, 50); // 在回送报文中截取出数值 back = strchr(strstr(back, "\"current_value\":"), ':') + 1; while (*back != '}') { if(*back == '\"'){ back++; continue; } value = value * 10 + (*back - '0'); back++; } return value; } //ESP8266模块和PC进入透传模式 void esp8266_start_trans(void) { //让Wifi模块重启的命令 esp8266_send_cmd("AT+RST", "OK", 50); esp8266_send_cmd("AT+CIPCLOSE", "OK", 50); esp8266_send_cmd("AT+CWMODE=1", "OK", 50); esp8266_send_cmd("AT+CWDHCP=1", "OK", 50); delay_ms(1000); //延时2S等待重启成功 delay_ms(1000); //让模块连接上自己的路由WIFI GOT IP while (esp8266_send_cmd("AT+CWJAP=\"WZQ\",\"1234567890\"", "WIFI GOT IP", 500)){ delay_ms(1); }; //建立TCP连接 这四项分别代表了 要连接的ID号0~4 连接类型 远程服务器IP地址 远程服务器端口号 while (esp8266_send_cmd("AT+CIPSTART=\"TCP\",\"183.230.40.33\",80", "CONNECT", 200)){ delay_ms(1); }; } //ESP8266退出透传模式 返回值:0,退出成功;1,退出失败 //配置wifi模块,通过想wifi模块连续发送3个+(每个+号之间 超过10ms,这样认为是连续三次发送+) u8 esp8266_quit_trans(void) { u8 result = 1; u3_printf("+++"); delay_ms(1000); //等待500ms太少 要1000ms才可以退出 result = esp8266_send_cmd("AT", "OK", 20); //退出透传判断. if (result) printf("quit_trans failed!"); else printf("quit_trans success!"); return result; } //向ESP8266发送命令 //cmd:发送的命令字符串;ack:期待的应答结果,如果为空,则表示不需要等待应答;waittime:等待时间(单位:10ms) //返回值:0,发送成功(得到了期待的应答结果);1,发送失败 u8 esp8266_send_cmd(u8 *cmd, u8 *ack, u16 waittime) { u8 res = 0; USART3_RX_STA = 0; u3_printf("%s\r\n", cmd); //发送命令 delay_ms(1); if (ack && waittime) //需要等待应答 { while (--waittime) //等待倒计时 { delay_ms(10); if (USART3_RX_STA&0X8000) //接收到期待的应答结果 { if (esp8266_check_cmd(ack)) { printf("%s\r\n", (u8 *)USART3_RX_BUF); break; //得到有效数据 } USART3_RX_STA = 0; //strcpy((char *)USART3_RX_BUF, ""); // 清空接收缓存区 } } if (waittime == 0) res = 1; } return res; } //ESP8266发送命令后,检测接收到的应答 //str:期待的应答结果 //返回值:0,没有得到期待的应答结果;其他,期待应答结果的位置(str的位置) u8 *esp8266_check_cmd(u8 *str) { char *strx = 0; if (USART3_RX_STA & 0X8000) //接收到一次数据了 { USART3_RX_BUF[USART3_RX_STA & 0X7FFF] = 0; //添加结束符 strx = strstr((const char *)USART3_RX_BUF, (const char *)str); } return (u8 *)strx; } //向ESP8266发送数据 //cmd:发送的命令字符串;waittime:等待时间(单位:10ms) //返回值:发送数据后,服务器的返回验证码 u8 *esp8266_send_data(u8 *cmd, u16 waittime) { char temp[1024]; char *ack = temp; USART3_RX_STA = 0; u3_printf("%s", cmd); //发送命令 delay_ms(1); if (waittime) //需要等待应答 { while (--waittime) //等待倒计时 { delay_ms(10); if (USART3_RX_STA & 0X8000) //接收到期待的应答结果 { USART3_RX_BUF[USART3_RX_STA & 0X7FFF] = 0; //添加结束符 ack = (char *)USART3_RX_BUF; USART3_RX_STA = 0; break; //得到有效数据 } } } return (u8 *)ack; } // 将数字转为字符串 void numToString(u16 value) { int k = 0, j = 0; int num = (int)value; char tem[10]; if (value == 0) { strValue[0] = '0'; strValue[1] = '\0'; return; } while (num) { tem[k++] = num % 10 + '0'; //将数字加字符0就变成相应字符 num /= 10; //此时的字符串为逆序 } tem[k] = '\0'; k = k - 1; while (k >= 0) { strValue[j++] = tem[k--]; //将逆序的字符串转为正序 } strValue[j] = '\0'; //字符串结束标志 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
需要注意的是这段代码有两个地方需要修改:

分别换成自己云平台的设备ID和master-keyapi。
4、oled液晶屏
这是调试程序的好帮手,用的好可以很快找出程序是哪里出问题了。这个驱动代码网上都有很多封装好的,这里就不贴出来了。本项目用的是四引脚oled,使用IIC通信协议,IIC协议的原理可以看此视频:https://www.bilibili.com/video/BV1th411z7sn/?p=31&spm_id_from=pageDriver&vd_source=2a10d30b8351190ea06d85c5d0bfcb2a
想连接oled的详细代码可以看此视频:
https://www.bilibili.com/video/BV1EN41177Pc/?spm_id_from=333.337.search-card.all.click&vd_source=2a10d30b8351190ea06d85c5d0bfcb2a
二、微信小程序
微信小程序最关键的地方就是与云平台的数据交互,其他比如界面、功能都是在这个的基础上才有用。对微信小程序开发感兴趣的可以学一下javascript,比较简单。
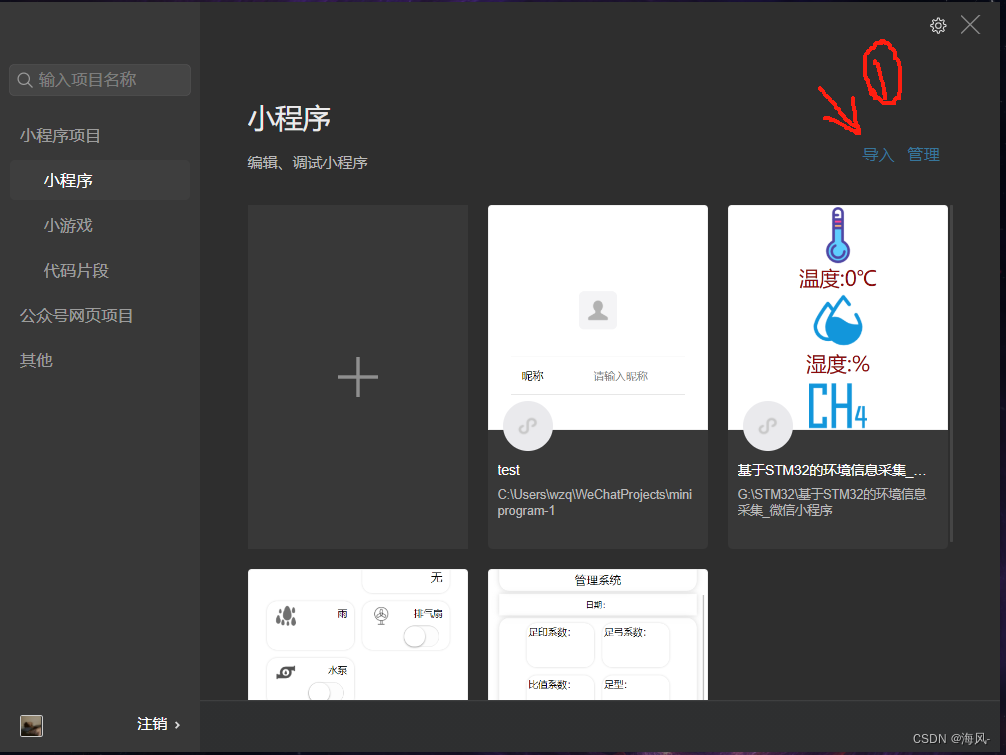
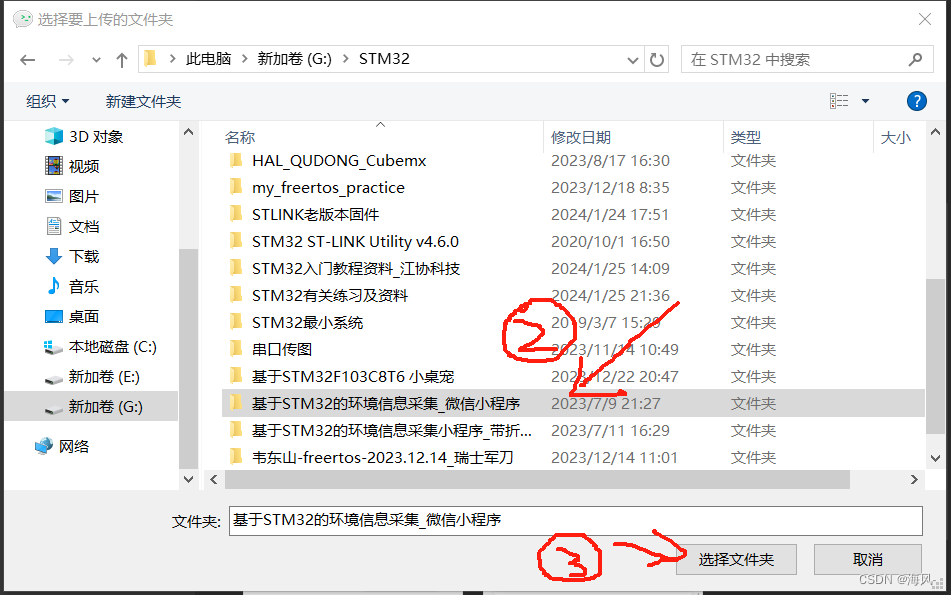
下载文章末尾的开源项目压缩包,解压之后可以看到里面有一个文件夹叫:基于STM32的环境信息采集_微信小程序,打开微信开发者工具,选择导入,选择此小程序文件夹打开即可。
进入工程之后修改设备ID和master-keyapi:
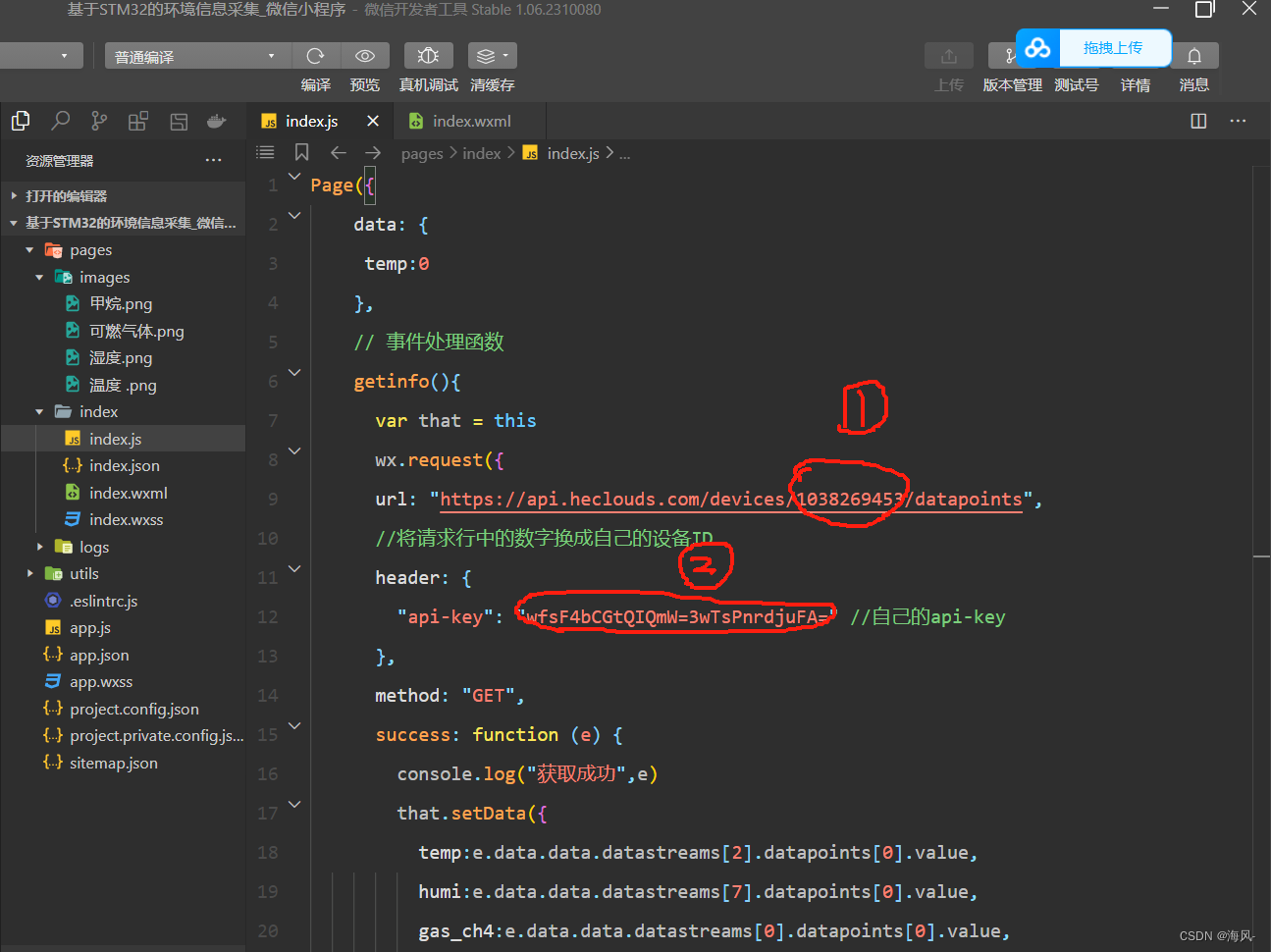
index.js代码:
Page({ data: { temp:0 }, // 事件处理函数 getinfo(){ var that = this wx.request({ url: "https://api.heclouds.com/devices/1038269453/datapoints", //将请求行中的数字换成自己的设备ID header: { "api-key": "wfsF4bCGtQIQmW=3wTsPnrdjuFA=" //自己的api-key }, method: "GET", success: function (e) { console.log("获取成功",e) that.setData({ temp:e.data.data.datastreams[2].datapoints[0].value, humi:e.data.data.datastreams[7].datapoints[0].value, gas_ch4:e.data.data.datastreams[0].datapoints[0].value, ranqi:e.data.data.datastreams[4].datapoints[0].value }) console.log("temp==",that.data.temp), console.log("humi==",that.data.humi), console.log("gas==",that.data.gas_ch4), console.log("ranqi==",that.data.ranqi) } }); }, onLoad() { var that = this setInterval(function(){ that.getinfo() },5000) } })
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
三、项目获取
- 文章浏览阅读3.2k次,点赞7次,收藏76次。采用esp8266模块通过手机端网络助手向32端发送指令,32端进行判断执行,所以采用esp8266的AP模式,将esp8266模块本身作为热点服务器,手机端作为客户端,连接热点WiFi发送数据... [详细]
赞
踩
- 文章浏览阅读1.1k次,点赞2次,收藏12次。以STM32G030C8T6中的HAL_TIM_Base_Start_IT()函数为例,进行解释;_hal_tim_base_start_ithal_tim_base_start_it以STM3... [详细]
赞
踩
- 定时器作为微控制器不可缺少的外设,在STM32中也是如此。相信不少初学者学到定时器的时候对STM32的学习热情就大打折扣甚至想要放弃了,因为这一部分知识确实比较复杂。但是,如果你在之前对GPIO、串口通信、外部中断的学习中把这些外设掌握了的... [详细]
赞
踩
- article
ElasticSearch~received plaintext http traffic on an https channel, closing connection Netty4HttpChan
ElasticSearch默认开启了安全认证,需要将安全认证关掉。ElasticSearch服务正常启动,但是在浏览器上无法访问。_receivedplaintexthttptrafficonanhttpschannel,closingco... [详细]赞
踩
- article
【ES报错】Unable to parse response body for Response{requestLine=PUT /index/_doc...HTTP/1.1 201 Created}
UnabletoparseresponsebodyforResponse{requestLine=PUT/index/_doc...HTTP/1.1201Created}_unabletoparseresponsebodyforrespon... [详细]赞
踩
- article
基于 STM32 的语音识别智能家居控制系统的设计(LD3320语音识别芯片+ESP8266 WIFI模块+DHT11温湿度采集+MQ系列 烟雾及可燃气体+蜂鸣器+步进电机模拟窗帘+OLED液晶显示+_基于语音识别的智能家居控制
基于STM32的语音识别智能家居控制系统的设计(LD3320语音识别芯片+ESP8266WIFI模块+DHT11温湿度采集+MQ系列烟雾及可燃气体+蜂鸣器+步进电机模拟窗帘+OLED液晶显示+_基于语音识别的智能家居控制基于语音识别的智能家... [详细]赞
踩
 请耐心阅读,如有点击不同的操作请重新尝试此节需要仔细理解,细心设置,方能成功第三节4. Web数据可视化。_stm32esp8266连接阿里云stm32esp8266连接阿里云系列文章目录提示:这里是从实际应用如何使用教学配置,未从原理讲解... [详细]
请耐心阅读,如有点击不同的操作请重新尝试此节需要仔细理解,细心设置,方能成功第三节4. Web数据可视化。_stm32esp8266连接阿里云stm32esp8266连接阿里云系列文章目录提示:这里是从实际应用如何使用教学配置,未从原理讲解... [详细]赞
踩
- HX711压力传感器学习(STM32)_hx711hx711目录原理图:引脚介绍:HX711介绍工作原理:程序讲解:整套工程:发送的代码工程,与博客的不一致,如果编译有报错请按照报错和博客进行修改原理图: 引脚介绍:VCC和GN... [详细]
赞
踩
- STM32CubeMx界面介绍、STM32CubeMx使用教程、RCC时钟配置、SYS配置、时钟树配置、STM32CubeMx结合Keil使用方法_stm32cubemx教程stm32cubemx教程文章目录前言一、STM32CubeMx界... [详细]
赞
踩
- Content-Type(内容类型),一般是指网页中存在的Content-Type,用于定义网络文件的类型和网页的编码,决定浏览器将以什么形式、什么编码读取这个文件。Content-Type标头告诉客户端实际返回的内容的内容类型。HTTPc... [详细]
赞
踩
- article
❤ error: RPC failed; curl 92 HTTP/2 stream 0 was not closed cleanly: PROTOCOL_ERROR (err 1)_error: rpc failed; curl 92 http/2 stream 0 was not
❤error:RPCfailed;curl92HTTP/2stream0wasnotclosedcleanly:PROTOCOL_ERROR(err1)_error:rpcfailed;curl92http/2stream0wasnotcl... [详细]赞
踩
- 最近有不少小伙伴私信留言,想要我推出一章能够通过APP进行远程控制并获取传感器信息的实验教程。说实话在嵌入式毕设里边,这算是中等偏上水平的了。刚好我也有兴趣写写。全篇4700多字,我写的很详细,按着文章一步一步操作即可。(建议跟同学集资购买... [详细]
赞
踩
- 物联网、智能家居、云平台、自制APP本系统包含以下六方面功能:1、手机APP远程控制2、语音控制3、手机app查看家中的温度湿度信息4、超声波坐姿监测5、OLED显示系统当前状态6、万年历(支持按键修改时间)_基于stm32的灯光报警系统基... [详细]
赞
踩
- HAL库常用GPIO函数以及外部中断配置与响应流程_外部中断响应过程外部中断响应过程Hello,大家好,这是我第一篇博客,写的不好请大家包涵指教,话不多说直接看内容:HAL库常用GPIO函数:voidHAL_GPIO_Init(GPIO_T... [详细]
赞
踩
- stm32串口连接esp8266WiFi模块,通过AT指令控制模块进行数据收发,和服务器进行通讯。可以用于单片机直接的通信,手机和单片机通讯等。_基于stm32、esp8266及ov7670的无线图传下位机源码基于stm32、esp8266... [详细]
赞
踩
- article
解决思路:java.lang.IllegalArgumentException: Invalid character found in method name. HTTP method names
然后,我们设置了请求方法为POST,并设置了请求头部信息,包括Content-Type和Accept。通过检查代码中的方法名、使用合适的HTTP请求方法常量、使用第三方HTTP库、检查请求URL以及使用调试和日志工具,我们可以解决这个异常并... [详细]赞
踩
- article
Android WebView 报错 ( 网页无法打开 位于 http://... 的网页无法加载, 因为 net::ERR_CLEARTEXT_NOT_PERMITTED )_android webview net:err_http_response_code_failure
这意味着,如果应用程序尝试连接到一个不安全的HTTP网站,将收到net::ERR_CLEARTEXT_NOT_PERMITTED错误;在Android9.0及以上的系统版本中,系统默认情况下禁止应用程序使用不安全的明文流量进行网络连接,以提... [详细]赞
踩
 使用STM32作为控制器,ULN2003作为驱动模块驱动28BYJ-48步进电机,可实现通过按键控制电机以不同速度转过不同角度……_步进电机uln2003步进电机uln2003本篇文章包含的内容一、步进电机的结构和工作原理1.1步进控制系统... [详细]
使用STM32作为控制器,ULN2003作为驱动模块驱动28BYJ-48步进电机,可实现通过按键控制电机以不同速度转过不同角度……_步进电机uln2003步进电机uln2003本篇文章包含的内容一、步进电机的结构和工作原理1.1步进控制系统... [详细]赞
踩
 欢迎来到我的博客。今天我想向大家介绍一下STM32软件I2C功能。首先,让我们来了解一下I2C(Inter-IntegratedCircuit)总线。I2C是一种串行通信总线,最初由Philips公司开发。它允许多个设备使用同一条总线进行通... [详细]
欢迎来到我的博客。今天我想向大家介绍一下STM32软件I2C功能。首先,让我们来了解一下I2C(Inter-IntegratedCircuit)总线。I2C是一种串行通信总线,最初由Philips公司开发。它允许多个设备使用同一条总线进行通... [详细]赞
踩
- 无论是在与团队内部协作开发时,还是在与第三方系统进行接口联调时,接口调用是不可或缺的一环。而在这个过程中,许多开发者会首选一款功能强大且易用的工具,其中最常见的就是。类似地,在IntelliJIDEA中使用HTTPClient插件时,我们也... [详细]
赞
踩

