
- 1springBoot + netty搭建高性能 websocket 服务 & 性能测试(包含python 测试脚本)_netty websocket 和netty-websocket 性能对比
- 2rsync全面讲解
- 3头歌大数据——MapReduce 基础实战 答案 无解析_成绩统计头歌
- 4android的camera_android.hardware.camera
- 5HDFS目录与文件的创建删除与查询操作_hdfs如何删除目录
- 6PMP 2022-10-10 (每日一练)_manfrit和frank是两个项目经理,在他们的职业生涯中一直相互支持。在一次偶然的午
- 7Redis原理
- 8Java IO流--使用FileReader字符输入流读入数据到java程序或者内存的基本操作_filereader 怎么直接传入输入流
- 9scrapy实现分布式爬虫以及布隆过滤器,scrapy-redis所遇到的问题,终端进入虚拟环境_from scrapy_redis.spiders import rediscrawlspider出
- 10ChatGPT 和文心一言哪个更好用?_chatgpt和文心一言哪个更适合seo
【ROS进阶】一文搞懂ROS话题通信机制与消息队列_ros消息队列
赞
踩
一、话题通信机制解析
1、话题通信机制简介
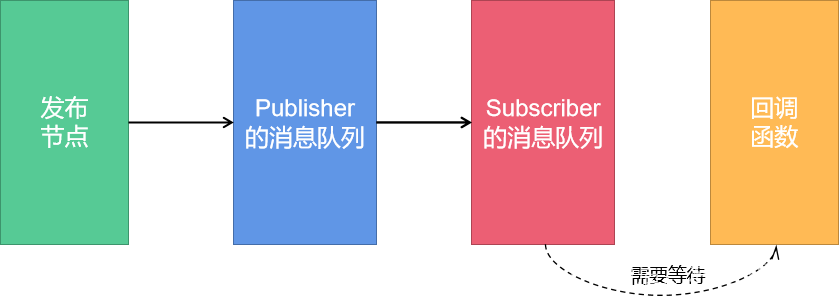
(1)首先,发布节点把消息发布,消息进入Publisher的消息队列,同时通知订阅了该话题消息的Subscriber来取消息。
(2)其次,Subscriber来Publisher的消息队列里取消息,但取走的也是最老的消息,因为毕竟这是先入先出的队列。
(3)最后,被取走的消息存放入了Subscriber的消息队列中,等待被Callback执行。如果Callback执行很慢,消息越堆越多,最老的消息会逐渐被顶替。
2、消息队列分析
Publisher和Subscriber设置消息队列,都可以从两点进行分析:
- 话题通信属于异步通信,队列可以存储一定量的历史数据
- 网络传输异常的时候,队列可以预先进行缓存
(1)为什么需要设置Publisher的消息队列?
- 话题通信属于异步通信,publisher节点发布消息,有多个Subscriber节点进行订阅,因此需要有一个地方对消息进行缓存。
- 网络传输差、延时突然高的时候,可以把消息放在Publisher的队列中进行暂存。
(2)为什么要设置Subscriber消息队列?
- Subscriber消息队列提供一边处理数据一边缓存新消息的机制。Publisher和Subscriber不一定在同一台主机上,但是网络的性能时好时坏,如果Subscriber没有消息队列。如果没有Subscriber消息队列,那么程序每次运行Callback函数前都要先通过网络取回消息,然后才能处理,当网络很差的时候就会造成系统的阻塞。
3、使用技巧
(1)队列长度queue_size参数选择
参考:http://wiki.ros.org/rospy/Overview/Publishers%20and%20Subscribers#Choosing_a_good_queue_size
- 当queue_size=0,即ROS消息队列为0时,表示为无限队列长度,内存使用量可以无限增长,因此不推荐使用。
- 当两个queue_size=1时,那么系统不会缓存数据,自然处理的就是最新的消息。
- 当queue_size设置为10或者更多时候,用户更不容易错过发布的消息,适用于与人交互的用户界面的数据展示。
(2)ros::spinOnce机制
- 一次 ros::spinOnce()会获取完所有Subscriber队列中的消息
二、实验验证
实验过程比较繁杂,可以直接看第三部分:总结
(一)subscriber队列长度对数据传输影响
1、实验目的
测试什么状态下队列会溢出
- 1
2、实验结论
结论一:
当回调函数处理时长小于数据发布的时间间隔,数据可以完整地传输。
结论二:
subscriber队列可以对接收数据进行缓存,spinonce每次进入回调函数,会取出Subscriber队列中最新的数据
3、详细实验过程
测试一:
1)条件设置
- 数据发布为5Hz
- 回调函数执行时间为0.19s
2)测试代码:
#include<ros/ros.h>
#include<ros/time.h>
#include"std_msgs/Int8.h"
int main(int argc,char **argv)
{
ros::init(argc,argv,"test_publisher");
ros::NodeHandle node;
//控制队列长度
ros::Publisher num_pub = node.advertise<std_msgs::Int8>("num",1);
//控制Publisher发送频率
ros::Rate loop_rate(5);
int count=0;
while(ros::ok())
{
std_msgs::Int8 msg;
msg.data=count;
num_pub.publish(msg);
std::cout<<"I send:"<<count<<" "<<"Time:"<<ros::Time::now()<<std::endl;
count++;
ros::spinOnce();
loop_rate.sleep();
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
#include"ros/ros.h"
#include<ros/time.h>
#include <ros/duration.h>
#include"std_msgs/Int8.h"
void numcallback(const std_msgs::Int8::ConstPtr& msg)
{
ROS_INFO("I heard:[%d]",msg->data);
std::cout<<"Time:"<<ros::Time::now()<<std::endl;
ros::Duration(0.19).sleep();
}
int main(int argc,char **argv)
{
ros::init(argc,argv,"test_subscriber");
ros::NodeHandle node;
ros::Subscriber sub=node.subscribe("num", 5, numcallback);
//subscriber节点数据订阅频率
while(ros::ok())
{
ros::spinOnce();
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
3)测试结果:
I send:0 Time:1651218272.909345283
I send:1 Time:1651218273.109455274
I send:2 Time:1651218273.309404860
I send:3 Time:1651218273.509534306
I send:4 Time:1651218273.709532966
I send:5 Time:1651218273.909548481
I send:6 Time:1651218274.109474975
I send:7 Time:1651218274.309555626
I send:8 Time:1651218274.509553033
I send:9 Time:1651218274.709557666
I send:10 Time:1651218274.909548771
I send:11 Time:1651218275.109466288
I send:12 Time:1651218275.309543458
I send:13 Time:1651218275.509558336
I send:14 Time:1651218275.709546293
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
[ INFO] [1651218273.309568749]: I heard:[2]
Time:1651218273.310396018
[ INFO] [1651218273.509881431]: I heard:[3]
Time:1651218273.509977833
[ INFO] [1651218273.709862283]: I heard:[4]
Time:1651218273.709933310
[ INFO] [1651218273.909996336]: I heard:[5]
Time:1651218273.910075954
[ INFO] [1651218274.109691506]: I heard:[6]
Time:1651218274.109723500
[ INFO] [1651218274.309999529]: I heard:[7]
Time:1651218274.310088643
[ INFO] [1651218274.509997999]: I heard:[8]
Time:1651218274.510090090
[ INFO] [1651218274.709979046]: I heard:[9]
Time:1651218274.710068361
[ INFO] [1651218274.909994015]: I heard:[10]
Time:1651218274.910081014
[ INFO] [1651218275.109661000]: I heard:[11]
Time:1651218275.109693420
[ INFO] [1651218275.309972661]: I heard:[12]
Time:1651218275.310058529
[ INFO] [1651218275.509988978]: I heard:[13]
Time:1651218275.510075436
[ INFO] [1651218275.709965890]: I heard:[14]
Time:1651218275.710054172
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
测试二:
1)测试条件
- 数据发布为5Hz
- 回调函数执行时间为1s
2)测试代码:
同测试一代码,ros::Duration(0.19).sleep();修改为ros::Duration(1).sleep();
3)测试结果:
I send:0 Time:1651218738.926879714
I send:1 Time:1651218739.126986022
I send:2 Time:1651218739.326976590
I send:3 Time:1651218739.527334121
I send:4 Time:1651218739.727314856
I send:5 Time:1651218739.927253191
I send:6 Time:1651218740.127338630
I send:7 Time:1651218740.327119437
I send:8 Time:1651218740.527310282
I send:9 Time:1651218740.727320096
I send:10 Time:1651218740.927319061
I send:11 Time:1651218741.127077520
I send:12 Time:1651218741.327314284
I send:13 Time:1651218741.527084625
I send:14 Time:1651218741.727320603
I send:15 Time:1651218741.927310977
I send:16 Time:1651218742.127316121
I send:17 Time:1651218742.327314879
I send:18 Time:1651218742.527084705
I send:19 Time:1651218742.727317344
I send:20 Time:1651218742.927309793
I send:21 Time:1651218743.127181334
I send:22 Time:1651218743.327346438
I send:23 Time:1651218743.526975577
I send:24 Time:1651218743.727310035
I send:25 Time:1651218743.926981510
I send:26 Time:1651218744.127081416
I send:27 Time:1651218744.327057619
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
[ INFO] [1651218739.327222543]: I heard:[2]
Time:1651218739.328122020
[ INFO] [1651218740.328379711]: I heard:[3]
Time:1651218740.328493901
[ INFO] [1651218741.328750504]: I heard:[8]
Time:1651218741.328841823
[ INFO] [1651218742.329083810]: I heard:[13]
Time:1651218742.329179718
[ INFO] [1651218743.329413185]: I heard:[18]
Time:1651218743.329527079
[ INFO] [1651218744.329811444]: I heard:[23]
Time:1651218744.329907939
[ INFO] [1651218745.330186229]: I heard:[24]
Time:1651218745.330278204
[ INFO] [1651218746.330738718]: I heard:[25]
Time:1651218746.330852786
[ INFO] [1651218747.331349463]: I heard:[26]
Time:1651218747.331466039
[ INFO] [1651218748.331944456]: I heard:[27]
Time:1651218748.332064212
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
(二)数据传输时间延迟
1、实验目的
测试同一平台下,节点发布订阅之间的延迟
- 1
2、实验结论
1)同一平台上,发布与订阅节点之间存在延迟时间:大概为0.2ms
2)先运行订阅者节点,后运行发布者节点也会存在数据丢失,说明:订阅者与发布者刚建立连接时需要大致0.5s的时间
3、详细实验过程
//测试
publisher节点:5HZ发送数据
subscriber节点:循环无延迟接收
publisher队列长度:1
subscriber队列长度:1
- 1
- 2
- 3
- 4
- 5
订阅者节点程序:
#include"ros/ros.h"
#include<ros/time.h>
#include"std_msgs/Int8.h"
void numcallback(const std_msgs::Int8::ConstPtr& msg)
{
ROS_INFO("I heard:[%d]",msg->data);
std::cout<<"Time:"<<ros::Time::now()<<std::endl;
}
int main(int argc,char **argv)
{
ros::init(argc,argv,"test_subscriber");
ros::NodeHandle node;
ros::Subscriber sub=node.subscribe("num", 1 , numcallback);
//subscriber节点数据订阅频率
//ros::Rate loop_rate(1);
while(ros::ok())
{
ros::spinOnce();
// loop_rate.sleep();
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
I send:0 Time:1651205837.321564955
I send:1 Time:1651205837.521682618
I send:2 Time:1651205837.721703296
I send:3 Time:1651205837.921677835
I send:4 Time:1651205838.121677621
I send:5 Time:1651205838.321678661
I send:6 Time:1651205838.521629560
I send:7 Time:1651205838.721682315
I send:8 Time:1651205838.921686516
I send:9 Time:1651205839.121680353
I send:10 Time:1651205839.321681521
I send:11 Time:1651205839.521680580
I send:12 Time:1651205839.721678035
I send:13 Time:1651205839.921678646
I send:14 Time:1651205840.121678181
I send:15 Time:1651205840.321680872
I send:16 Time:1651205840.521679562
I send:17 Time:1651205840.721690948
I send:18 Time:1651205840.921680647
I send:19 Time:1651205841.121677714
I send:20 Time:1651205841.321677517
I send:21 Time:1651205841.521679494
I send:22 Time:1651205841.721680698
I send:23 Time:1651205841.921687221
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
[ INFO] [1651205837.721951989]: I heard:[2]
Time:1651205837.722832444
[ INFO] [1651205837.921802016]: I heard:[3]
Time:1651205837.921839834
[ INFO] [1651205838.121838956]: I heard:[4]
Time:1651205838.121857432
[ INFO] [1651205838.321856591]: I heard:[5]
Time:1651205838.321874992
[ INFO] [1651205838.521779574]: I heard:[6]
Time:1651205838.521797385
[ INFO] [1651205838.721839387]: I heard:[7]
Time:1651205838.721876415
[ INFO] [1651205838.921855876]: I heard:[8]
Time:1651205838.921891244
[ INFO] [1651205839.121832170]: I heard:[9]
Time:1651205839.121883353
[ INFO] [1651205839.321850889]: I heard:[10]
Time:1651205839.321871226
[ INFO] [1651205839.521831303]: I heard:[11]
Time:1651205839.521865618
[ INFO] [1651205839.721848060]: I heard:[12]
Time:1651205839.721867795
[ INFO] [1651205839.921843985]: I heard:[13]
Time:1651205839.921864013
[ INFO] [1651205840.121845232]: I heard:[14]
Time:1651205840.121864557
[ INFO] [1651205840.321851113]: I heard:[15]
Time:1651205840.321871289
[ INFO] [1651205840.521843675]: I heard:[16]
Time:1651205840.521862573
[ INFO] [1651205840.721814996]: I heard:[17]
Time:1651205840.721868193
[ INFO] [1651205840.921852729]: I heard:[18]
Time:1651205840.921871924
[ INFO] [1651205841.121849661]: I heard:[19]
Time:1651205841.121867539
[ INFO] [1651205841.321848846]: I heard:[20]
Time:1651205841.321866561
[ INFO] [1651205841.521847632]: I heard:[21]
Time:1651205841.521864884
[ INFO] [1651205841.721849989]: I heard:[22]
Time:1651205841.721867769
[ INFO] [1651205841.921830872]: I heard:[23]
Time:1651205841.921847805
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
三、总结
1、数据发布到缓存到订阅者队列的时间是很短的,大约为0.5ms,如果对数据实时性要求比较高,发布者和订阅者的队列长度均需要设置为1;
2、回调函数处理数据时间过长,subscriber队列数据堆积,并可能导致数据丢失。每次执行回调函数时,会从subscriber队列选取最老的数据。
- 首先,新建一个开机自启.txt文本文件,然后在文件中写入以下三行指令第一行:切换到可代码所在的盘符(如果不加这一行有时会报错)第二行:进入代码所放的文件夹中第三行:执行python文件H:cdH:\02_projects\2网站监测\程序p... [详细]
赞
踩
 什么是管道?1、管道是Unix中最古老的进程间通信的形式。2、我们把从一个进程连接到另一个进程的一个数据流称为一个“管道”。管道只能进行单向通信,用来传输资源:数据。我们按下面的步骤来分析:1、首先,父进程分别以读和写的方式,打开了一个文件... [详细]
什么是管道?1、管道是Unix中最古老的进程间通信的形式。2、我们把从一个进程连接到另一个进程的一个数据流称为一个“管道”。管道只能进行单向通信,用来传输资源:数据。我们按下面的步骤来分析:1、首先,父进程分别以读和写的方式,打开了一个文件... [详细]赞
踩
- config:用来配置安全相关的权限等core:一些安全的业务逻辑META-INF:配置spring的自动import类学习流程org.springframework.boot.autoconfigure.AutoConfiguration... [详细]
赞
踩
- a,b为对象BeanUtils.copyProperties(a,b);1,BeanUtils是org.springframework.beans.BeanUtils,a拷贝到b2,BeanUtils是org.apache.commons.... [详细]
赞
踩
- 可以通过store的$subscribe()方法查看状态及其变化。类似于Vuex的subscribe方法,订阅store的mutation。constunsubscribe=store.subscribe((mutation,state)=... [详细]
赞
踩
- 很久很久没有记录过debug了,今天有空就正好记录一下stm32F407的开发板程序运行到断点位置就会进入hardFault,如图所示师傅告诉我:这个地址是奇数有问题啊!字节对齐!STM32出现硬件错误可能有以下原因:(1)数组越界操作;(... [详细]
赞
踩
- flask+Python+Vue实现前后端分离的web项目并部署至云服务器_pythonflask加载vue项目pythonflask加载vue项目flask+Python+Vue实现前后端分离的web项目并部署至云服务器1后台+算法模型1... [详细]
赞
踩
- 概述:本文将通过组织自己的训练数据,使用Pytorch深度学习框架来训练自己的模型,最终实现自己的图像分类!本篇文章以识别阳台为例子,进行讲述。一.数据准备深度学习的基础就是数据,完成图像分类,当然数据也必不可少。先使用爬虫爬取阳台图片12... [详细]
赞
踩
- 一、题目描述略二、思路两个游标i、j,一个辅助变量id。 j用来记录元素要复制到的位置:也就是0、1、2、3…… i用来记录哪个元素要进行复制操作,id辅助这一过程。 j很好说,步长为1,直接for循环j++就可以了。 关键是i,关键是哪个... [详细]
赞
踩
- 在文件'D:\data\BooksDB.mdf'中、偏移量为0x0000011d10400的位置执行读取期间,操作系统已经向SQLServer返回了错误1117(由于I/O设备错误,无法运行此项请求)SQLServer错误日志和系统事件日志... [详细]
赞
踩
- 高并发解决方案1.高并发和大流量解决方案高并发解决方案案例 流量优化:防盗链处理 前端优化:减少HTTP请求,合并css或js,添加异步请求,启用浏览器缓存和文件压缩,CDN加速,建立独立图片服务器, 服务端优化:页面静态化,并发处理... [详细]
赞
踩
- 查找进程号top或则ps2.进去进程号启动目录cd/proc/PID(进程号)eg:cd/proc/11861exe指向就是启动文件注意恶意进程时top找不到可以在使用ps查一下确认是否自己开启的_centos7通过pid查找文件cento... [详细]
赞
踩
- 点击上方「嵌入式大杂烩」,选择「置顶公众号」第一时间查看嵌入式笔记!前言本次分享几个实用的、值得学习使用的嵌入式相关开源项目,下面列举的这些基本上都在本公众号分享过,详细介绍及使用可查看..._有什么有意思的开源嵌入式项目有什么有意思的开源... [详细]
赞
踩
- 2803x系列DSP有两个内部时钟源(INTOSC1和INTOSC2),可以不需要外部时钟。同时,也具有PLL时钟模块。如果不使用外部晶振作为时钟源,可以选择这种模式。时钟从外部时钟源的XCLKIN引脚输入生成。内部时钟源1(INTOSC1... [详细]
赞
踩
- yum更换源centos更换国内yum下载源centos更换国内yum下载源1.前提,可以ping通百度先下载wget工具,可能有点慢yuminstall-ywget12.备份原来的下载源sudomv/etc/yum.repos.d/Cen... [详细]
赞
踩
- 本文将模仿固件库文件system_stm32f10x.c的SetSysClockTo72()函数,编写一个可以改变系统时钟大小的函数。使用HSE配置系统时钟本文将模仿固件库文件system_stm32f10x.c的SetSysClockTo... [详细]
赞
踩
- 首先查看自启动的服务然后我们去找到自启动服务的路径cd/etc/rc.d/init.dlinux开机自启动的服务都存在这个文件夹下面,那么事情就简单了,开机的时候会自动去启动该文件下的服务,那么到这里事情就简单了,我们只需要把mysql的启... [详细]
赞
踩
- Vue使用一种基于HTML的模板语法,使我们能够声明式地将其组件实例的数据绑定到呈现的DOM上。所有的Vue模板都是语法层面合法的HTML,可以被符合规范的浏览器和HTML解析器解析。在底层机制中,Vue会将模板编译成高度优化的JavaSc... [详细]
赞
踩
- 力扣:删除有序数组中的重复项(简单)解题思路:1.nums[i]原数组nums[j]新数组2.两层for循环,固定第一个数,用第二个数和第一个数对比,相等则删除splice(),同时j--,不等则将第一个与第三个相比3.j--为新数组的长度... [详细]
赞
踩
- 龙蜥社区的AnolisOS8系列增加新成员啦!龙蜥操作系统(AnolisOS)8是龙蜥社区(OpenAnolis)发行的开源Linux发行版,支持多计算架构,提供稳定、高性能、安全、可靠的操作系统支持。AnolisOS8.6是AnolisO... [详细]
赞
踩

