
热门标签
热门文章
- 1人工神经网络原理及应用,神经网络的数学原理_人工神经网络走神是同步吗
- 2SpringBoot环境下JPA的使用_jpa springboot
- 3K8S动态PV
- 4【C/C++ 01】初级排序算法
- 5hsv量化后用颜色直方图进行图像相似度比对_为什么求直方图对比要变换到hsv空间
- 6TestFlight 提交提示“处理你的请求时出错。请稍后再试“下载提示“所请求的app不可以或者不存在“,报错422_testflight怎么发布处理你的请求时出错。请稍后再试。
- 7docker + docker-compose 配置安装、基础教程(Ubuntu 18.04 LTS)_docker-ce-18.04 装compos
- 8以太坊智能合约项目开发——Web3.py库安装及错误解决方案
- 9stm32f4 mpu6050与姿态解算(仅供自己学习使用,学习笔记)_mpu6050姿态解算
- 10vue sm2加密解密_vue使用sm2加解密
当前位置: article > 正文
写ros程序的时候话题订阅上了,但是callback不触发的问题,以及话题订阅发布不成功的原因_ros无法进入callback
作者:代码吟游诗人2 | 2024-01-30 22:34:25
赞
踩
ros无法进入callback
写ros程序的时候话题订阅上了,但是callback不触发的问题
是没有在线程的while循环中加入
ros::spinOnce();切记
如图:
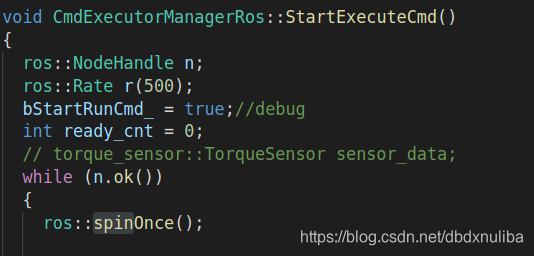
触发机制就是每执行一次ros::spinOnce();
如果有话题的话就会触发一次callback
订阅话题和发布话题的时候,
订阅和发布要弄成全局的,
如下所示

如果弄成
ros::Subscriber enabled_sub = node_handle_.subscribe<std_msgs::Bool>("/is_robot_enabled", 1,
这种函数内部的局部变量就订阅不上了,
订阅者的生命周期随着函数的退出就销毁了。切记
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/blog/article/detail/49942
推荐阅读
- 现在,你的Python文件已经被转换为EXE程序,并且在开机时会自动启动。请注意,添加到启动项中的程序将在用户登录时自动启动。创建一个新的Python脚本,用于将EXE程序添加到Windows的启动项中。运行新创建的Python脚本,将EX... [详细]
赞
踩
- 贪心算法的主要的解题目的思路是:860.柠檬水找零这道题算是生活中很常见的一道题,对于每一个顾客如果我们都有足够的零钱给他找零,那么就返回true,只要有一个顾客没有足够的零钱找给他就返回false。顾客只能有3种纸币,5元,10元,20元... [详细]
赞
踩
- 分页查询,就是将将过多的结果在有限的界面上分好多页来显示,这个是很多网站常用的功能,也是最基本的功能,今天简单总结一下。分页以前听人们说都是一项技术,但是我觉的不尽然。我认为分页是将数据库的数据,利用一些特殊的sql语句来进行查询,显示理所... [详细]
赞
踩
- Cortex-m的HardFault信息的本地保存_hardfault_argshardfault_args做项目的过程中难免会遇到各式各样的死机问题,KEIL提供了很多好用的方法,串口打印,debug调试等等。然而有时一些问题往往难以复现... [详细]
赞
踩
- 基于es聚合函数bucket_sort、terms和指标聚合cardinality实现。背景:elasticsearch聚合之后进行分页是非常常见的操作。最终实现分组分页排序功能。3、java获取结果。_elasticsearch分组查询e... [详细]
赞
踩
- Leetcode347.前K个高频元素1、问题分析2、问题解决3、总结1、问题分析题目链接:https://leetcode-cn.com/problems/top-k-frequent-elements/ 本质上就是一个 map使用的问... [详细]
赞
踩
- 获取鼠标点击图片时候的坐标,以及利用html中的useMap和area实现图片固定位置的点击事件。获取鼠标点击图片时候的坐标,以及利用html中的useMap和area实现图片固定位置的点击事件一编写原因 ... [详细]
赞
踩
- Vue.js是一个渐进式JavaScript框架,用于构建用户界面。Vue的核心库只关注视图层,不仅易于上手,也便于与第三方库或已有项目整合。Vue和React都是现代的前端框架,它们提供了丰富的特性和工具,帮助开发者构建复杂的用户界面。虽... [详细]
赞
踩
- 大家好,我是曹尼玛,刚从培训机构毕业,去一家单位上班一周了…这一周项目经理让我熟悉了项目业务,架构和设计,不算难,凭借我培训机构第一名的成绩,还是很顺溜。今天项目经理把同事们叫到一起,说线上438x6项目出现奇葩问题,但是开发环境初步测试没... [详细]
赞
踩
- 业务系统高并发(HighConcurrency)限流:鉴于只有少部分用户能够秒杀成功,所以要限制大部分流量,只允许少部分流量进入服务后端。分流:负载就是问题,高并发问题。均衡就是解决手段。削峰:对于秒杀系统瞬时会有大量用户涌入,所以在抢购一... [详细]
赞
踩
- 物理分页的方式由数据库提供,效率高,但是不同的数据库对于分页的实现各有差异,所以首先要看一下不同数据库对于分页的sql实现_数据库分页数据库分页 在日常的开发中,做数据分页是很常见的需求了,面对... [详细]
赞
踩
- HashMap的基本属性publicclassHashMap
赞
踩
- article
2022年山东省职业院校技能大赛 网络搭建与应用赛项 第二部分 网络搭建与安全部署&服务器配置及应用_rt1 串行链路、 rt2 串行链路、 fw1、ac1 之间分别运行 rip 和 ripng 协议,
某集团公司原在北京建立了总公司,后在成都建立了分公司,广东设立了办事处。集团设有产品、营销、法务、财务、人力5个部门,全网采用OSPF、RIP、ISIS、BGP路由协议进行互联互通。为了更好管理数据,提供服务,集团在北京建立两个数据中心,在... [详细]赞
踩
- CUDA踩坑查看CUDA版本想查看CUDA的版本时,突然出现以下的情况:这并不是因为系统没有安装CUDA,而是环境中没有罢了。注意:千万不要执行aptinstallnvidia-cuda-toolkit,否则就会重新安装一个版本。解决方法进... [详细]
赞
踩
- 1、堡垒机是什么?堡垒机,就是在一个特定的网络环境下,为了保障网络和数据不受来自外部和内部用户的入侵和破坏,采用各种技术手段监控和记录运维人员对网络内的服务器、网络设备、安全设备、数据库等..._堡垒机技术介绍堡垒机技术介绍1、堡垒机是什么... [详细]
赞
踩
 本博主将用CSDN记录软件开发求学之路上亲身所得与所学的心得与知识,有兴趣的小伙伴可以关注博主!也许一个人独行,可以走的很快,但是一群人结伴而行,才能走的更远!_mysql安装过程中“configtype”有几种类型?mysql安装过程中“... [详细]
本博主将用CSDN记录软件开发求学之路上亲身所得与所学的心得与知识,有兴趣的小伙伴可以关注博主!也许一个人独行,可以走的很快,但是一群人结伴而行,才能走的更远!_mysql安装过程中“configtype”有几种类型?mysql安装过程中“... [详细]赞
踩
- AcWing2.01背包问题AcWing3.完全背包问题AcWing4.多重背包问题AcWing5.多重背包问题AcWing9.分组背包问题_动态规划背包问题分析总结动态规划背包问题分析总结目录... [详细]
赞
踩
- 该文章是根据上面文章https://blog.csdn.net/Sun_of_Rainy/article/details/102523659搭建过程遇到问题的总结首先说明一下,我刚开始接触springboot,vue以前做项目看过别人写的改... [详细]
赞
踩
- 1.查看当前有那些表是打开的,In_use列表示有多少线程正在使用某张表,Name_locked表示表名是否被锁showOPENTABLESwhereIn_use>0;2.1.显示哪些线程正在运行:只列出前100条showprocessli... [详细]
赞
踩
- 首先,我们获取数组中的第一个字符串“leetcoder”,让它与其他字符串作比较,来判断“leetcoder”是否是对方的子串,那么遍历完其他字符串之后,发现,都不满足成为对方子串的条件,那么本次循环结束。在第二个解题思路中,依然是采用暴力... [详细]
赞
踩
相关标签

