
- 1棉秸秆热解的催化反应
- 2SpringBoot进行自然语言处理,利用Hanlp进行文本情感分析
- 3亚马逊云科技中国峰会:Amazon DeepRacer——载着 AI 梦想向前奔跑
- 4#13文献学习--边缘计算的计算卸载建模综述
- 5【腾讯云 HAI域探秘】StableDiffusionWebUI 让我找到了宫崎骏动漫里的夏天
- 6数据结构-二叉树(2)
- 7Python web实战之Django的文件上传和处理详解_django上传
- 8Android 13 - Media框架(4)- MediaPlayerService_android media
- 9【面经】2023年软件测试面试题大全(持续更新)附答案_测试工程师 面经
- 10[AI语音克隆] 5秒内克隆您的声音并生成任意语音内容_声音克隆
μC/OS-Ⅱ中的多任务_uscosii接收任务能创建2个队列错误
赞
踩
在学习单片机上使用uscos系统时,思考的一些问题和总结,自己也画了一些图来描述这些想法。本文主要分析问题和模型结构,不会过多涉及具体代码。
为什么需要多任务系统?
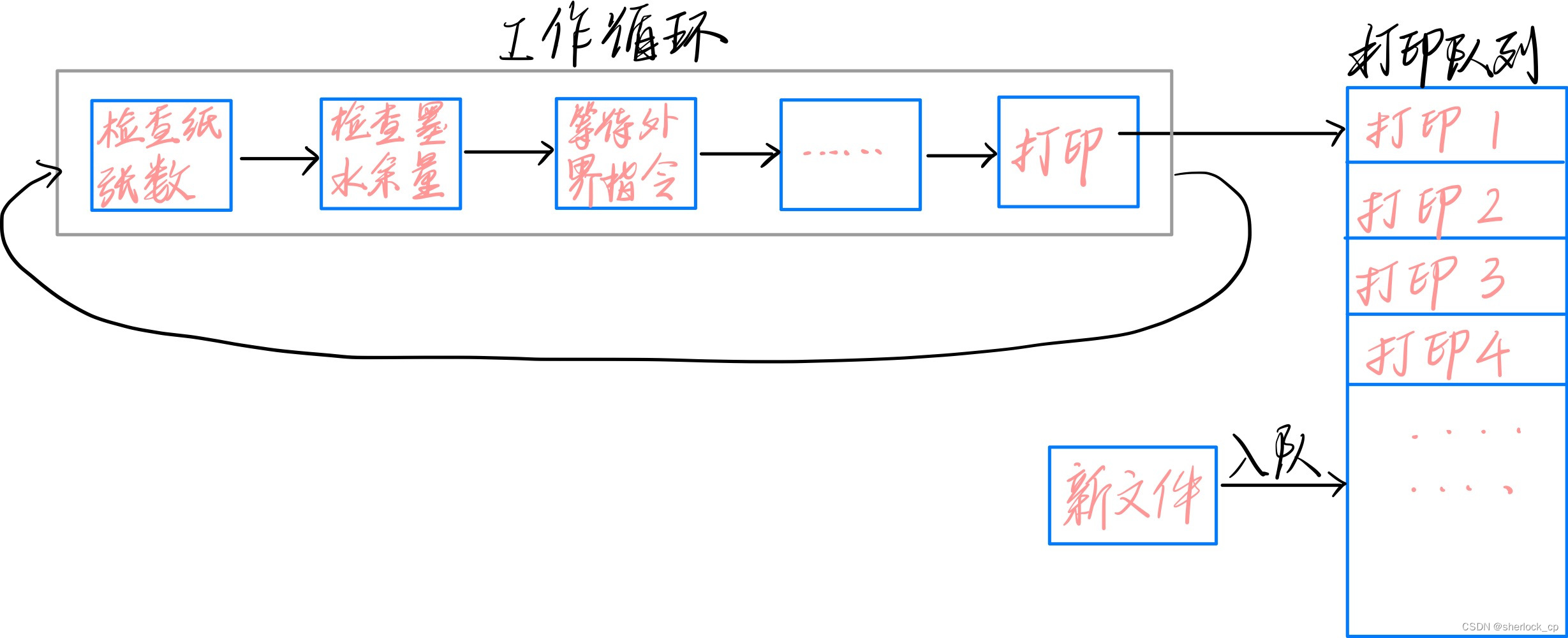
在思考这个问题之前,需要首先回答什么是实时操作系统,如今的嵌入式系统大多是实时操作系统,实时意味着系统必须及时并快速地响应外部事件,如中断等。想象一个打印系统,多份文件正在排队等待打印,此时有一个高优先级的资料进入打印队列,为了让这份资料优先打印,需要怎么设计该系统:
- 使用一个单任务系统,该系统循环工作,每次循环都会先执行检查工作,再打印一份文件,该系统维护了一个文件打印队列,每次有高优先级的资料进入,将插队到它该处的位置待打印(不会打断当前打印过程),系统会遍历打印队列中的文件。
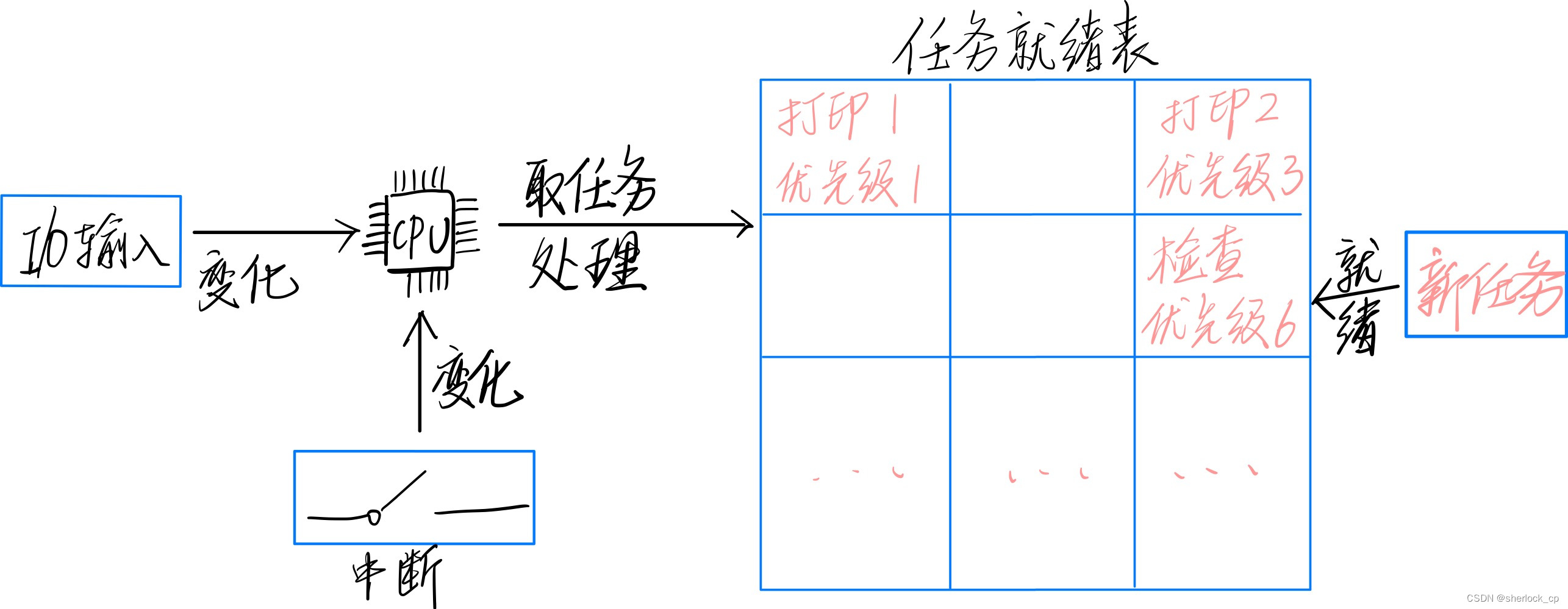
- 使用一个多任务系统,维护一个任务栈,所有的检查维护工作都是系统任务,需要打印的文件也划分到任务级,每个任务有自己的优先级和工作方式,将新进的高优先级任务进入就绪状态,系统会自动根据优先级顺序进行循环工作。
粗略一看,两种方案的核心思想都是一样的,都有根据优先级排队的意思,第一种方案实现还更简洁明了,但如果放到一个实际需求中去分析,就是另一种情况了。
此时我需要提前检查墨水和纸张含量,以保证后续的打印工作,因为我不想等到已经没墨没纸了,再去添加。在第一种方案下,我需要等待当前的打印工作完成,并进入到下一个循环的检查工作时,才能响应我的需求,如果该文件过大,或许要等半个小时才能结束!整个过程好像一个单线程的工作方式,一旦进入某个环节就必须完成它,对外界变化的响应时间是不确定的。而在第二种方案下,我可以提高“检查墨水和纸张工作”的优先级,将它作为整体的任务加入到任务栈中,系统可以在打印完当前页面后,进行任务调度,先进行我要求的任务,响应时间是基本固定且迅速的。
再比如,此时我需要打印的某份资料是彩色的,需要去增加彩色墨水盒。在第一种方案下,系统必须等待我加入彩色墨水盒的动作完成并确认,才能恢复整体工作。这一动作看上去没啥问题,但在添加墨水盒的过程中,打印机没有做任何事情,不能暂时跳过当前任务,去安排下一个黑白文件的打印,利用率是低下的。而第二种方案,在我加入墨水的过程中,系统可以安排很多其他的无关任务而不会停顿。
从上面两个例子可以总结出两种系统的优缺点:
- 循环系统是一个单线程的系统,工作非常稳定,系统相对简单,缺点是难以拓展,响应变化的时间不稳定,只有在特定场景才能发挥高效率(工作任务固定)。
- 多任务系统是一个多线程系统,缺点是需要相对复杂的同步方法来稳定工作秩序,且需要额外的开销来进行任务切换。
回到最开始的思考,现在可以知道,实时系统必须是一个多任务系统。
多任务长什么样?
在处理一个大而复杂的问题时,我们通常倾向于“分而治之”,即把一个大问题分解成多个相对简单、容易解决的小问题,这些小问题也可以叫做小任务,通过运行多个小任务,可以最终达到大任务的目的。μC/OS-Ⅱ就是一个能对这些小任务小问题进行管理和调度的多任务系统,如下图,每一个任务都有三部分组成:任务控制块、任务堆栈、任务程序代码。

其中,任务控制块记录了任务的各个属性,并存放了各种指针;任务堆栈用来保存任务的工作环境和数据;程序代码即任务的具体执行部分。
不同的任务通过各自的任务控制块相链接,形成一条任务控制块链。在μC/OS-Ⅱ中,最多能运行64个不同的任务,优先级从0~63,数字越小优先级越高,即任务控制块链的长度最多为64。且μC/OS-Ⅱ明确规定:不能定义优先级相同的任务,这样才能保证系统运行的稳定。这里面包括了系统任务和用户自定义的任务,其中系统任务只预定义了两个,这两个任务分别占据了最低的两个优先级(最低优先级或称任务数由用户自定义的OS_LOWEST_PRIO值决定):
- 空闲任务:系统在没有其他任务时会处于空闲状态,为了使其“有事可做”,创造了一个所谓的“空闲任务”。空闲任务是必须存在的,它可以使系统处于循环的工作状态中,以满足系统的工作机制(模式),而不需要额外创造规则去适应这个空闲状态(有点绕,思考一下)。
- 统计任务:统计CPU的利用率,每秒计算一次CPU在单位时间内被使用的时间,用户可以根据应用的需要来选择是否需要统计任务。
那么问题来了,任务控制块链是如何产生的呢?
实际上,μC/OS-Ⅱ中共有两条任务控制块链表,均为双向链表结构,一条是空任务控制块链表OSTCBFreeList,一条是实实在在的任务控制块链表OSTCBList。这里所说的空链表并不是指链表上没有元素,而是系统在调用OSInit()进行初始化时,会建立一条长度为OS_MAX_TASKS(用户自定义值)的链表,这上面的每一个元素都是空的任务控制块,仅有数据结构,没有数据,如图:
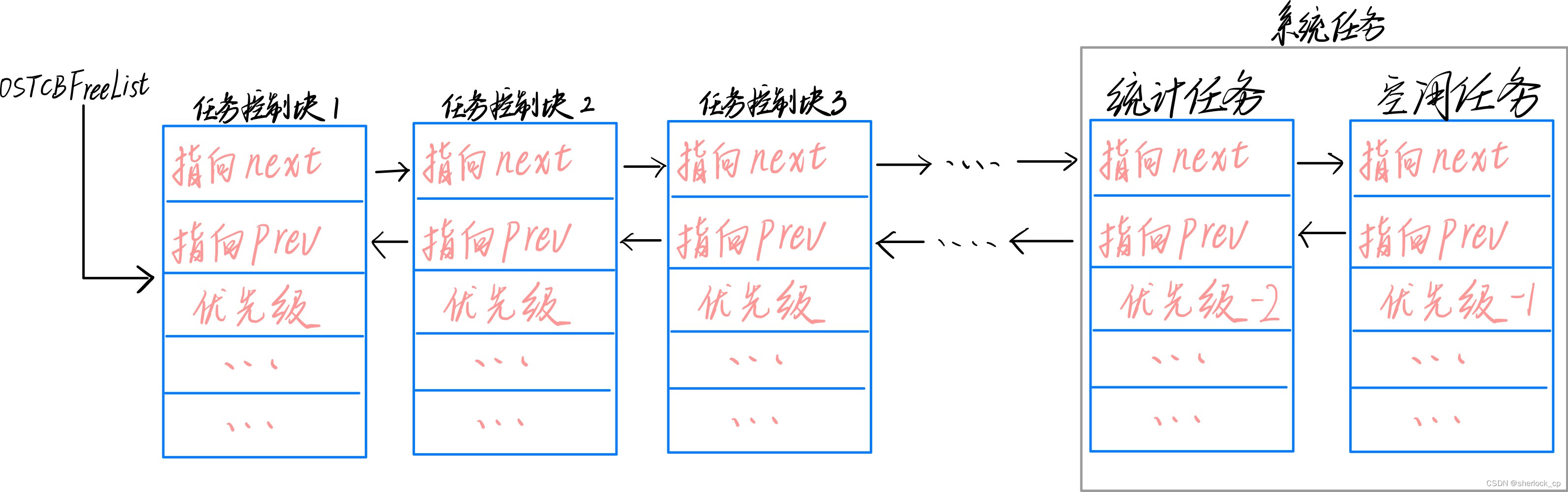
而另一条任务控制块链表在初始化时没有元素,会在创建任务的过程中向链表添加任务控制块元素。本质就是一个替换的过程,先在一个容器中预留足够的空盒子,每创建一个任务,就把该任务装进一个空盒子里,并取出该盒子放到另一个容器中,具体描述如下:
- 将空链表OSTCBFreeList的头指针指向的空任务控制块分配给新创建的任务;
- 利用新建任务的属性,对该空任务控制块的各成员进行赋值,使之成为该任务的唯一识别“身份证”;
- 使用另一条任务控制块链表OSTCBList的头指针将该任务控制块加入到链表头部位置,原来的空链表OSTCBFreeList头指针则指向下一个空任务控制块元素,完成任务控制块的转移。
除了任务控制块链表,系统还定义了一个任务优先级数组OSPrioTbl[ ]。该数组以按优先级顺序一次存放了各个任务控制块的指针,这样在访问某个任务的任务控制块时,就不必遍历整条任务控制块链表了(空间替换时间),上述的这些结构都可以用下图来表示。
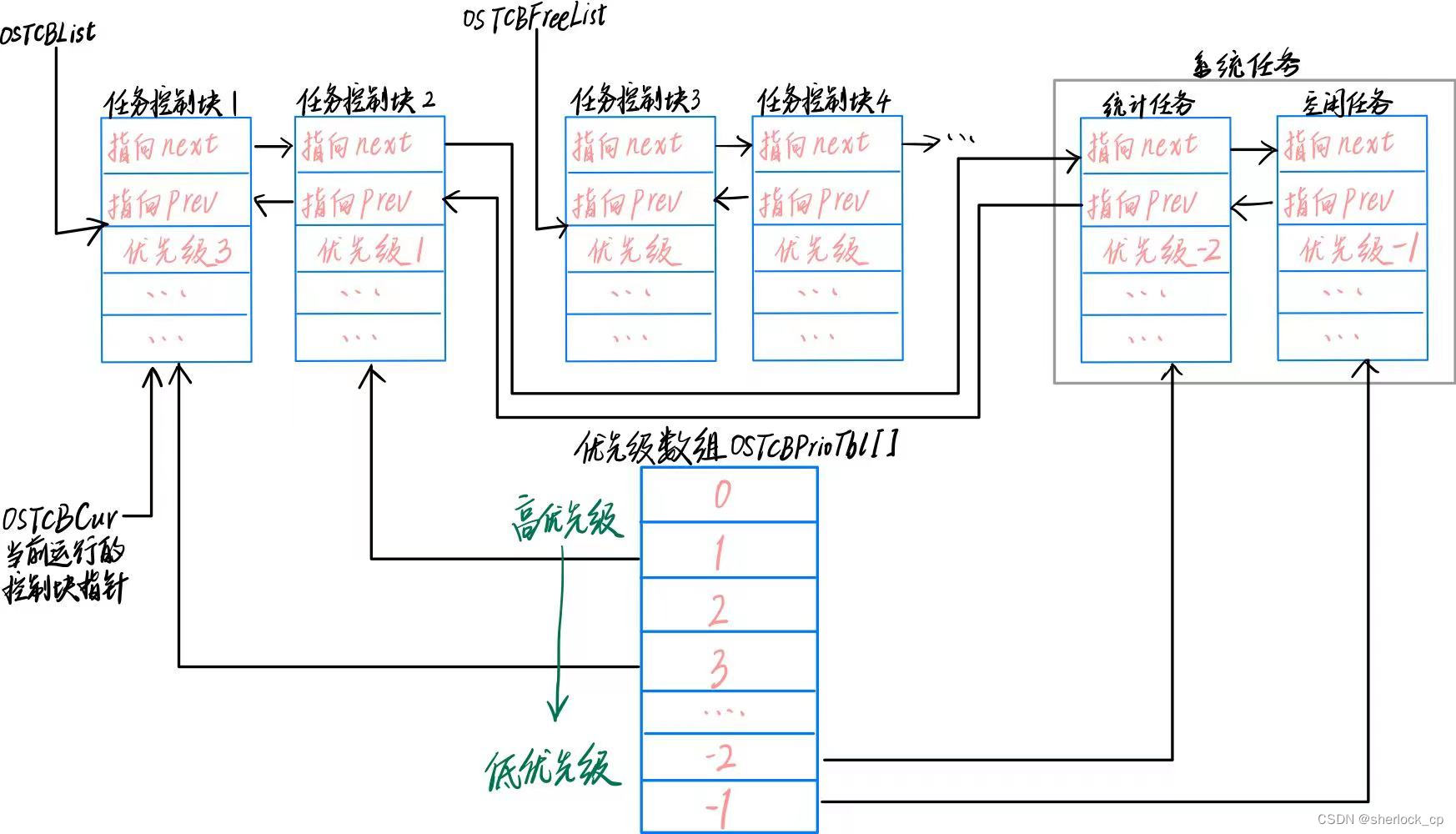
这也解释了为什么我们在对任务进行操作时,通常使用任务的优先级来进行索引,这种方式可以快速定位到该任务的任务控制块,再对控制块及其相连接的结构进行操作。
在此基础上,我们也可以很容易猜想到删除任务的原理,即:把任务控制块链表OSTCBList的某个任务控制块的数据还原为空,再逆向操作,将其归还到空任务控制块链表OSTCBFreeList中。这个过程相当于将任务控制器进行“吊销”,但任务本身还是存在于内存中的(未激活)。
由此可见,任务控制块结构是实现多任务管理的核心,任何针对任务的操作都离不开任务控制块,关于任务控制块内部的具体内容之后有时间可以继续分享。
多任务如何运行?
我们在第一个问题中已经了解,在系统的运行过程中,会不断地对就绪表中的任务进行获取和处理,这些任务自身就是个循环体,在不断地重复运行,确保系统不会停下来。在第二个问题中也提到,多个任务通过任务控制块相连,实现任务的快速定位和操作。那么,就绪表和任务控制块链表是什么关系?
先来看就绪表的结构:
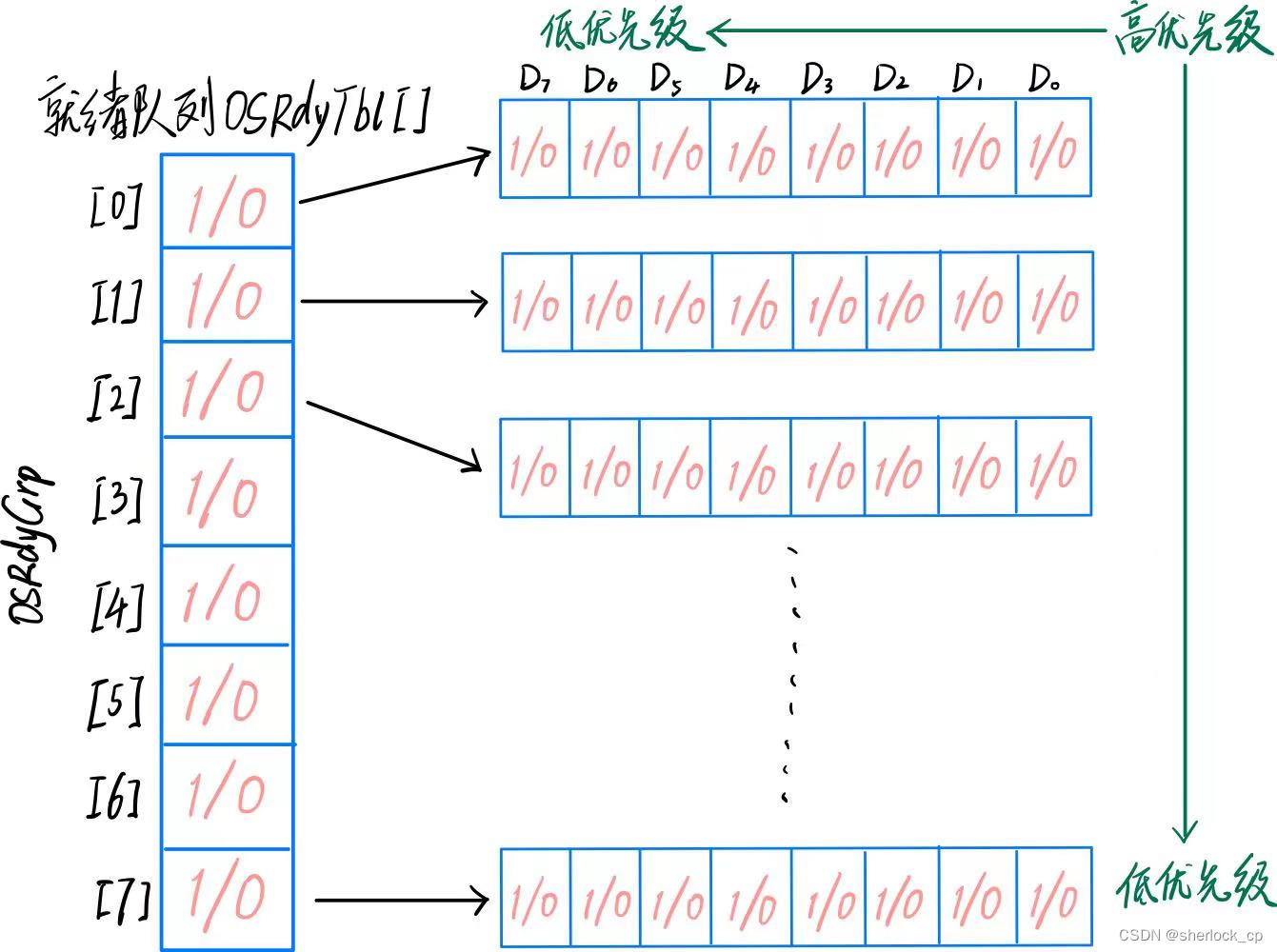
就绪表使用一个数组OSRdyTbl[ ]来表示,数组长度为8,表示8个优先级组,优先级按自然索引顺序依次减小。每一组都是一个INT8U类型的整数,可以表示成八个二进制位(1/0),即八个优先级,其中低位为高优先级,某一位置1表示该优先级的任务已经就绪,置0表示该优先级没有任务就绪。为了进一步知道哪一个优先级组中存在就绪任务,μC/OS-Ⅱ引入了一个INT8U类型的变量OSRdyGrp,如OSRdyGrp=10100101表示OSRdyTbl[0]、OSRdyTbl[2]、OSRdyTbl[5]、OSRdyTbl[7]优先级组中存在任务就绪,具体哪一个优先级有任务还得具体看看OSRdyTbl[ ]的值。
了解了就绪表的结构,进一步就要知道就绪表如何操作和运行。就绪表主要包括三个操作:登记、注销和查找(从就绪任务中找到最高优先级任务的标识,当然标识就是“优先级“):
- 登记。就是在就绪表中将该任务对应的优先级位置置1;
- 注销。同上,将任务对应的优先级位置置0;
- 查找。从上述的OSRdyGrp变量来获取优先组别,再拿该优先组去OSRdyTbl[ ]寻找最高的优先级任务,找到该优先级后返回给系统,系统会根据该优先级获取到相应的任务控制块(看第二节)。
不过要让多任务运转起来,还需要有任务切换的过程,即任务调度。这包含两个步骤,一是寻找当前的最高优先级就绪任务,二就是进行任务切换。在这里有个细节:发生任务调度的原因,不是因为任务彻底完成了(任务是一个无尽的循环),而是因为进入了延时、等待事件或中断等。当调度发生时,需要获取到下一个任务的任务控制块指针OSTCBHighRdy,和当前需要被中止的任务控制块指针OSTCBCur(第二节有提到过),这些经过之前的介绍已经可以做到,接下来使用任务切换宏OS_TASK_SW()进行任务切换,其底层是函数OSCtxSw(),主要做了这两件事:
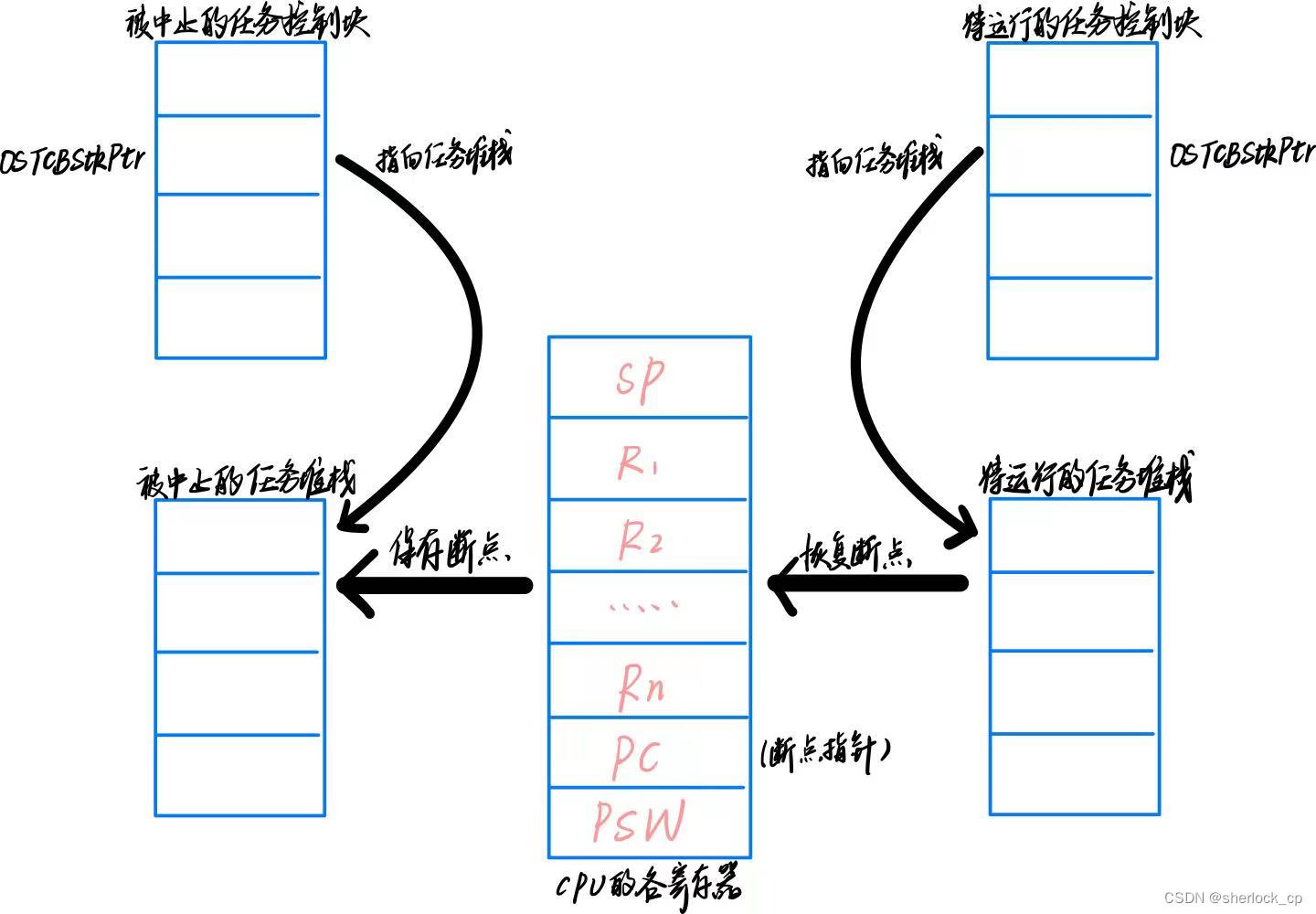
- 当前任务是被中止的,而不是被销毁,因此未来可能会重新登记,那么当该任务恢复运行时,必须在”断点“处以当时的”断点数据“作为初始值继续运行,才能实现”无缝衔接“。因此必须将任务被中止时的断点数据保存到任务堆栈中,这些断点数据包括被中止任务的断点指针(即运行到任务的具体代码位置)和CPU通用寄存器的值,并将任务堆栈的指针保存为任务控制块的OSTCBStkPtr成员;
- 待执行任务是被恢复的(包括初次执行),需要通过待运行任务的任务控制块找到其任务堆栈,将存储在任务堆栈中的通用寄存器值和断点指针恢复到CPU的各寄存器中,并继续运行。
这样就完成了就绪表和任务控制块的联动,也解释了μC/OS-Ⅱ系统多任务的运行流程。
总结上面的三大问题,多任务的运行流程就可以用这样的过程来描述:
- 创建任务,获得自己的任务控制块,并在就绪表上登记,在相应优先级位置置1;
- 系统按就绪表的优先级顺序取出已登记的优先级,以此去优先级数组找到对应的任务控制块,并处理任务;
- 处理任务的过程中,可能进入延时、等待事件或中断,此时系统会进入任务调度,重复上一个步骤,执行当前最高优先级任务,同时在就绪表将被中止的任务注销;
- 任务被挂起或者注销时,任务控制块被还原,任务虽然能保留在内存中,但已经与多任务系统没有关系了。
以上分享如有问题和错误,欢迎讨论和指正,关于任务之间的协调和通信,以后有机会继续分享。
- python使用pdfplumber读取dpf文本与图片_pdfplumber图片pdfplumber图片withpdfplumber.open('./1.pdf')aspdf: #获取第一页 first_page=pdf.pages[1]... [详细]
赞
踩
- CMOS电平和TTL电平:CMOS逻辑电平范围比较大,范围在3~15V,比如4000系列(4011与非门),当5V供电时,输出在4.6以上为高电平,输出在0.05V以下为低电平。输入在3.5V以上为高电平,输入在1.5V以下为低电平。而对于... [详细]
赞
踩
- 双冒号(::)作用域运算符起个全局作用代码如下#include"iostream"usingnamespacestd;intatk=200;voidatknumber(){intatk=100;//采用就近原则cout<<"没加双冒号的at... [详细]
赞
踩
- "::"在C++中表示作用域和所属关系。"::"是运算符中等级最高的,它分为三种,分别如下:一、作用域符号:作用域符号”::“的前面一般是类名称,后面一般是该类的成员名称,C++为例避免不同的类有名称相同的成员而采用作用域的方式进行区分。例... [详细]
赞
踩
- python222网站实战(SpringBoot+SpringSecurity+MybatisPlus+thymeleaf+layui)-ckeditor集成图片上传实现python222网站实战(SpringBoot+SpringSecu... [详细]
赞
踩
- 《二叉树》中等01——LeetCode114.二叉树展开为链表⭐算法入门⭐《二叉树》中等01——LeetCode114.二叉树展开为链表文章目录一、题目1、题目描述2、基础框架3、原题链接二、解题报告1、思路分析2、时间复杂度3、代码详解三... [详细]
赞
踩
- 重排链表对一个链表,先找到后半部门的链表将其反转,然后将后半部分插入到前前半部分中,隔一个插入一个。输入:head=[1,2,3,4]输出:[1,4,2,3]输入:head=[1,2,3,4,5]输出:[1,5,2,4,3](1)用双指针找... [详细]
赞
踩
- 免费分享一套Python俄罗斯方块源码PyQt5俄罗斯方块源码,太好玩了~免费分享一套Python俄罗斯方块源码PyQt5俄罗斯方块源码,太好玩了~大家好,我是java1234_小锋老师,看到一个不错的Python俄罗斯方块源码PyQt5俄... [详细]
赞
踩
- c++作用域运算符用法(全局变量和局部变量)通常情况下,如果有两个同名变量,一个是全局变量,另一个是局部变量,那么局部变量在其作用域内具有较高的优先权,它将屏蔽全局变量。作用域运算符#includeusingnamespacestd;int... [详细]
赞
踩
- Flask是一个用python编写的Web应用程序框架。ArminRonacher带领一个名为Pocco的国际Python爱好者团队开发了Flask。Flask基于WerkzeugWSGI工具包和Jinja2模板引擎。两者都是Pocco项目... [详细]
赞
踩
- 检查:1.数组越界2.内存溢出,访问越界3.堆栈溢出,程序跑飞4.中断处理错误_uscoshardfaultuscoshardfault检查: 1.数组越界2.内存溢出,访问越界3.堆栈溢出,程序跑飞4.中断处理错误... [详细]
赞
踩
- Flask是一个基于Python的Web框架。它是一个轻量级框架,非常适合小型项目和快速原型开发。Flask提供了一个简单的API,使得开发者可以快速构建Web应用。Flask的灵活性和可扩展性是它受欢迎的原因之一。我们介绍了Flask框架... [详细]
赞
踩
 解决dockernginx502错误connect()failed(111:Connectionrefused)whileconnectingtoupstream_dockernginx502dockernginx502 场景do... [详细]
解决dockernginx502错误connect()failed(111:Connectionrefused)whileconnectingtoupstream_dockernginx502dockernginx502 场景do... [详细]赞
踩
- 【代码】python之sm2加解密算法demo。_pythonsm2pythonsm2importosfromgmsslimportsm2importsysfromgmsslimportsm2frombase64importb64encod... [详细]
赞
踩
- 【代码】C++代码实现反转二叉树、对称二叉树后序遍历思想的应用。C++代码实现反转二叉树、对称二叉树后序遍历思想的应用//反转二叉树voidInvertTree(TreeNode*root){if(root==nullptr){return... [详细]
赞
踩
- 自从计算机发展开始,计算机软硬件相关技术的发展速度越来越快,在信息化高速发展的今天,计算机应用技术似乎已经应用到了各个领域。在餐饮行业,除了外卖以外就是到店里就餐,在店里就餐如果需要等待点餐的话,用户的体验度就会急剧下降,很多餐饮店也开始开... [详细]
赞
踩
- windows7&10使用任务计划程序设置程序开机自启全解(提供开机自启exe程序和后台自启java程序示例)windows7&10使用任务计划程序设置程序开机自启全解(提供开机自启exe程序和后台自启java程序示例)目录前言一、前置问题... [详细]
赞
踩
- insert慢 ... [详细]
赞
踩
- 在上一篇中,我们学习了关于前端框架与使用模板的一些知识,知道如何在模板中调用传入的参数以及如何继承模板以减少重复的代码,但是仅仅这些还是不太够的,有时候我们还需要对传入的参数进行一些判断与操作,所以这一篇我们来深入了解一下flask在渲染模... [详细]
赞
踩
- 1.管理网:服务器中的这个口是用来管理硬件的,如果电脑与此接口IP相通,在浏览器中输入IP可进入管理界面,将十几台服务器的这个口,连在一起,叫管理网2,业务网(????):用来登录系统的,将服务器后面的千兆以太网接口,调成在一个网络中,彼此... [详细]
赞
踩

