
- 1zabbix自动发现mysql端口并监控_discovery_mysql.sh
- 2mysql查询年龄大于18的女生_day06python数据库mysql之多表查询
- 3游戏SDK接入
- 4麒麟系统—— openKylin 安装 Maven
- 5Web3是什么?它可能带来哪些创业/财富机会?_web3是做什么的
- 6Zabbix 监控MySQL脚本(Python二次开发)_通过python zabbix数据推送 mysql
- 7Flink1.13中tableAPI对接数据源的source&sink_flink tableenv.connect已过时
- 8Python from import导包ModuleNotFoundError No module named,找不到模块问题_modulenotfounderror: no module named 'packaging
- 9【腾讯云云上实验室】用向量数据库融合AI技术:构建下一代智能客服平台
- 10Gartner:40%企业备份容灾方案亟需更替_gartner 云备份
ROS学习之路——第八章:tf坐标变换_rostf轨迹转换
赞
踩
translation:平移量 rotation:翻转量
一、静态坐标变换
1.概述
两个坐标系之间的相对位置是固定的,知道主体的坐标和雷达的坐标,通过雷达感知可以推算出主体距离障碍物的距离是多少
2.发布方发布
- #include "ros/ros.h"
- #include "tf2_ros/static_transform_broadcaster.h" //静态的依赖文件
- #include "geometry_msgs/TransformStamped.h" //用于实现坐标转换
- #include "tf2/LinearMath/Quaternion.h" //数据处理用的文件
- /*
- 发布两个坐标的相对关系
- */
-
- int main(int argc, char *argv[])
- {
- /* code */
- setlocale(LC_ALL,"");
- ros::init(argc, argv, "static_pub");
- ros::NodeHandle nh;
- //创建发布对象
- tf2_ros::StaticTransformBroadcaster pub;
- geometry_msgs::TransformStamped tfs;
- //stamp指时间戳,now可以获取当前时刻
- tfs.header.stamp = ros::Time::now();
- //frame指的是相对坐标系中被参考的那一个
- tfs.header.frame_id = "base";
- //child_frame表示雷达的坐标系
- tfs.child_frame_id="laser";
- //偏移量
- tfs.transform.translation.x=0.2;
- tfs.transform.translation.y=0.0;
- tfs.transform.translation.z=0.5;
- //四元数根据欧拉角来转换
- tf2::Quaternion qtn; //创建四元数对象
- //向该对象设置欧拉角
- qtn.setRPY(0,0,0); //单位是弧度!
- tfs.transform.rotation.x=qtn.getX();
- tfs.transform.rotation.y=qtn.getY();
- tfs.transform.rotation.z=qtn.getZ();
- tfs.transform.rotation.w=qtn.getW();
- //发布数据
- pub.sendTransform(tfs);
- ros::spin();
- return 0;
- }

3.订阅方订阅(tf算法实现坐标变换)
- #include "ros/ros.h"
- #include "tf2_ros/transform_listener.h" //创建订阅对象(监听)
- #include "tf2_ros/buffer.h" //将订阅到的数据存到buffer中
- #include "geometry_msgs/PointStamped.h" //组织一个坐标点数据
- #include "tf2_geometry_msgs/tf2_geometry_msgs.h" //tf自己封装的消息
-
- int main(int argc, char *argv[])
- {
- /* code */
- setlocale(LC_ALL,"");
- ros::init(argc, argv, "static_sub");
- ros::NodeHandle nh; //必须创建,内部函数需要用到
- //创建订阅对象(需要对象+缓存)
- //创建buffer缓存
- tf2_ros::Buffer buffer;
- //创建监听对象
- tf2_ros::TransformListener listener(buffer);
-
- //创建坐标点对象
- geometry_msgs::PointStamped ps;
- ps.header.frame_id = "laser";
- ps.header.stamp = ros::Time::now();
- ps.point.x=2.0;
- ps.point.y=3.0;
- ps.point.z=5.0;
-
- //添加休眠:以便坐标点被订阅方订阅(这个不加会报错!)
- ros::Duration(2).sleep();
-
- //转换算法,需要调用TF内置实现
- ros::Rate rate(10); //发布频率10Hz
- while(ros::ok())
- {
- //将ps转换为base(pub中)的坐标点
- geometry_msgs::PointStamped ps_out; //输出的坐标
- /*buffer.transform()
- 第一个参数为被转化的坐标,
- 第二个参数为视为参考点的名称
- 返回值是转化后的坐标
- */
- ps_out=buffer.transform(ps,"base");
- ROS_INFO("参考坐标系为:%s 转化后的坐标值:%.2f, %.2f, %.2f",
- ps_out.header.frame_id.c_str(),
- ps_out.point.x,
- ps_out.point.y,
- ps_out.point.z);
-
- rate.sleep();
- ros::spinOnce();
- }
- return 0;
- }
- //调用时必须包含头文件 tf2_geometry_msgs/tf2_geometry_msgs.h
-
4.可能会遇到的问题
(1)由于发布的坐标点不能马上被订阅方订阅到,所以在运行发布方后,可能会报错,因此我们需要再发布完坐标点后,让发布方休眠一段时间。
二、动态坐标变换
1.概述
获取动态的相对坐标
2.坐标发布方(同时需要订阅乌龟位姿信息)
- #include "ros/ros.h"
- #include "turtlesim/Pose.h"
- #include "tf2_ros/transform_broadcaster.h" //用于发布动态坐标消息
- #include "geometry_msgs/TransformStamped.h"
- #include "tf2/LinearMath/Quaternion.h" //欧拉角
-
- /*
- 订阅乌龟的位姿信息,转换成相对窗体的坐标
- 准备
- 话题:/turtle1/pose
- 消息:/turtlesim/Pose
- */
- void PoseCallback(const turtlesim::Pose::ConstPtr& pose)
- {
- //获取位姿信息,转化为坐标系相对关系并发布
- //创建TF发布对象
- static tf2_ros::TransformBroadcaster pub; //加static是为了防止每次进入回调函数都要重新定义一次
- //创建发布数据:从参数pose中进行转换
- geometry_msgs::TransformStamped ts;
-
- ts.header.frame_id="world"; //参考的坐标系(名字是固定的)
- ts.header.stamp=ros::Time::now();
- ts.child_frame_id="turtle1"; //相对的坐标系(名字是固定的)
- //坐标系平移量的设置
- ts.transform.translation.x = pose->x; //这些值都可以通过rosmsg info turtlesim/Pose来查看的
- ts.transform.translation.y = pose->y;
- ts.transform.translation.z = 0;
- //坐标系四元数
- //乌龟是2D的,因此没有翻滚和俯仰角,因此乌龟的欧拉角为0,0,theta
- tf2::Quaternion qtn;
- qtn.setRPY(0,0,pose->theta);
- //设置四元数
- ts.transform.rotation.x=qtn.getX();
- ts.transform.rotation.y=qtn.getY();
- ts.transform.rotation.z=qtn.getZ();
- ts.transform.rotation.w=qtn.getW();
- //发布
- pub.sendTransform(ts);
- }
-
- int main(int argc, char *argv[])
- {
- /* code */
- setlocale(LC_ALL,"");
- ros::init(argc, argv, "dynamic_pub");
- ros::NodeHandle nh;
- //参数一:话题名称 参数二:队列长度 参数三:回调函数
- ros::Subscriber sub=nh.subscribe("turtle1/pose",100,PoseCallback);
- ros::spin();
- return 0;
- }
3.坐标订阅方
- #include "ros/ros.h"
- #include "tf2_ros/transform_listener.h" //创建订阅对象(监听)
- #include "tf2_ros/buffer.h" //将订阅到的数据存到buffer中
- #include "geometry_msgs/PointStamped.h" //组织一个坐标点数据
- #include "tf2_geometry_msgs/tf2_geometry_msgs.h" //tf自己封装的消息
-
- int main(int argc, char *argv[])
- {
- /* code */
- setlocale(LC_ALL,"");
- ros::init(argc, argv, "static_sub");
- ros::NodeHandle nh; //必须创建,内部函数需要用到
- //创建订阅对象(需要对象+缓存)
- //创建buffer缓存
- tf2_ros::Buffer buffer;
- //创建监听对象
- tf2_ros::TransformListener listener(buffer);
-
- //创建坐标点对象
- geometry_msgs::PointStamped ps;
- //参考的坐标系
- ps.header.frame_id = "turtle1";
- //时间戳
- ps.header.stamp = ros::Time(0.0); //注意,发布动态消息时不可以发布实时的时间戳(不然会报错)
- ps.point.x=2.0;
- ps.point.y=3.0;
- ps.point.z=5.0;
-
- //添加休眠:以便坐标点被订阅方订阅(这个不加会报错!)
- ros::Duration(2).sleep();
-
- //转换算法,需要调用TF内置实现
- ros::Rate rate(10); //发布频率10Hz
- while(ros::ok())
- {
- //将ps转换为base(pub中)的坐标点
- geometry_msgs::PointStamped ps_out; //输出的坐标
- /*buffer.transform()
- 第一个参数为被转化的坐标,
- 第二个参数为视为参考点的名称
- 返回值是转化后的坐标
- */
- ps_out=buffer.transform(ps,"world");
- ROS_INFO("参考坐标系为:%s 转化后的坐标值:%.2f, %.2f, %.2f",
- ps_out.header.frame_id.c_str(),
- ps_out.point.x,
- ps_out.point.y,
- ps_out.point.z);
-
- rate.sleep();
- ros::spinOnce();
- }
- return 0;
- }
- //调用时必须包含头文件 tf2_geometry_msgs/tf2_geometry_msgs.h
-
4.可能会遇到的问题
(1)时间戳不可以实时发布
三、多坐标变换
1.概述
父级坐标world下,有两个子级坐标,已知两个子级坐标相对于world的相对坐标,求一个子级相对于另一个子级的坐标
2.发布方
我们采用.launch文件的形式,直接发布对象
- <launch>
- <!--发布son1相对于world 以及 son2相对于world的坐标关系-->
- <node pkg="tf2_ros" type="static_transform_publisher" name="son1" args="5 0 0 0 0 0 /world /son1" output="screen"/>
- <node pkg="tf2_ros" type="static_transform_publisher" name="son2" args="3 0 0 0 0 0 /world /son2" output="screen"/>
-
- </launch>
该情况下,我们发布的
son1坐标为(5,0,0),欧拉角为(0,0,0)
son2坐标为(3,0,0),欧拉角为(0,0,0)
使用时,直接启动laun文件即可
3.订阅方
- #include "ros/ros.h"
- #include "tf2_ros/transform_listener.h"
- #include "tf2_ros/buffer.h"
- #include "geometry_msgs/PoseStamped.h"
- #include "tf2_geometry_msgs/tf2_geometry_msgs.h"
- #include "geometry_msgs/TransformStamped.h"
-
- /*
- 1.计算son1与son2的相对关系 2.计算son1的某个坐标点在son2中的坐标值
- */
- int main(int argc, char *argv[])
- {
- /* code */
- setlocale(LC_ALL,"");
- ros::init(argc, argv, "turtles");
- ros::NodeHandle nh;
- //创建订阅对象
- tf2_ros::Buffer buffer;
- tf2_ros::TransformListener sub(buffer);
- //编写解析逻辑
- ros::Rate rate(10);
- //创建相对于son1的坐标点
- geometry_msgs::PointStamped psson1;
- psson1.header.stamp =ros::Time::now();
- psson1.header.frame_id="son1";
- psson1.point.x=1.0;
- psson1.point.y=2.0;
- psson1.point.z=3.0;
-
- while(ros::ok())
- {
- try //可以避免因为发布订阅不同步造成的报错
- {
- //计算son1与son2的相对关系
- /*buffer.lookupTransform()
- 参数1:根据该坐标系进行转化(父级)
- 参数2:原坐标系(子级)
- 参数3:何时的相对坐标
- 返回值:geometry_msgs::TransformStamped 子级相当于父级的相对坐标关系
- */
- geometry_msgs::TransformStamped son1toson2 = buffer.lookupTransform("son2","son1",ros::Time(0));
- ROS_INFO("son1 相对于 son2 的信息:父级%s 子级%s // 偏移量:%.2f, %.2f, %.2f",
- son1toson2.header.frame_id.c_str(),
- son1toson2.child_frame_id.c_str(),
- son1toson2.transform.translation.x,
- son1toson2.transform.translation.y,
- son1toson2.transform.translation.z);
- //计算son1中的某个坐标点在son2中的坐标值
- //创建相对于son2坐标点,然后将son1的转化为相对于son2的
- geometry_msgs::PointStamped psson2 = buffer.transform(psson1,"son2");
- ROS_INFO("son1坐标点在son2中的值: %.2f, %.2f, %.2f",
- psson2.point.x, psson2.point.y, psson2.point.z);
-
- }
- catch(const std::exception& e)
- {
- ROS_INFO("错误提示:%s",e.what());
- }
-
-
- rate.sleep();
- ros::spinOnce();
- }
- return 0;
- }
四、坐标系关系查看
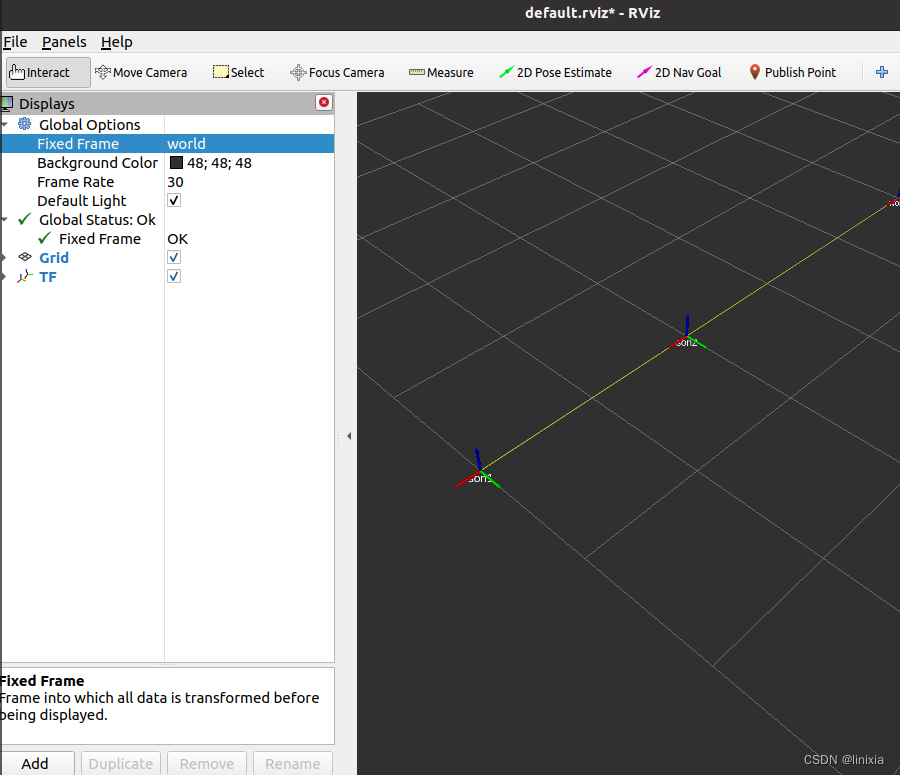
1.rviz图像化显示
![]()
可以得到如下界面
2.tf2_tools 功能包
(1)安装:
roslin@roslin-VirtualBox:~$ sudo apt install ros-noetic-tf2-tools
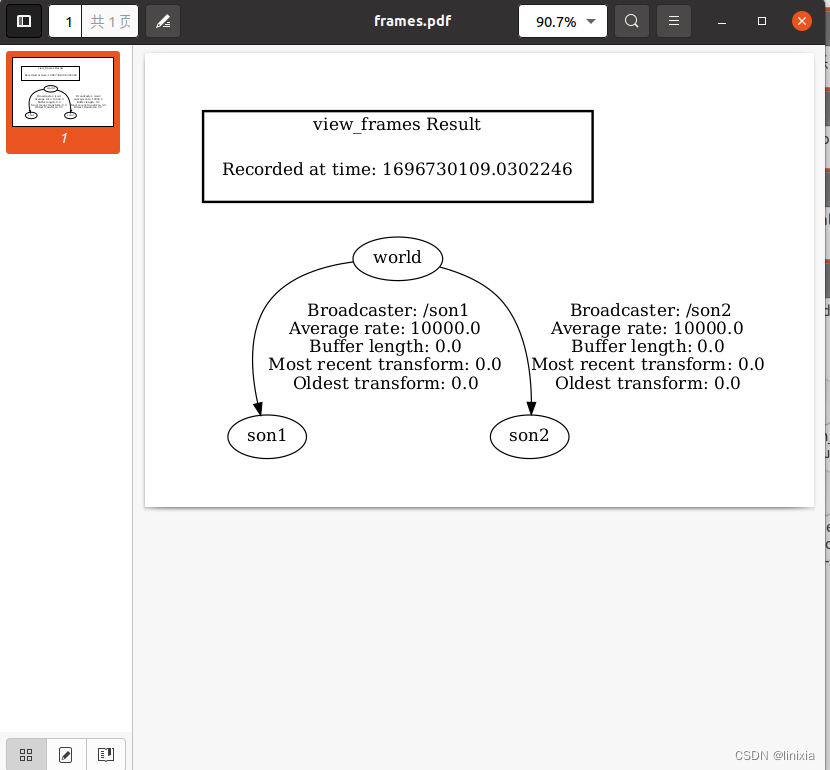
(2)启动完程序后生成pdf文件:
roslin@roslin-VirtualBox:~$ rosrun tf2_tools view_frames.py
(3)终端中打开pdf文件:
roslin@roslin-VirtualBox:~$ evince frames.pdf
得到如下界面:
五、TF坐标变换实操
1.概述:
实时将动态的相对坐标信息发送给观察者,观察者根据实时更新的坐标信息,匹配到相对应的速度信息,进而实现有效跟随。
2.生成一只新的乌龟:
- #include "ros/ros.h"
- #include "turtlesim/Spawn.h"
-
- int main(int argc, char *argv[])
- {
- /* code */
- ros::init(argc,argv,"newturtle");
- ros::NodeHandle nh;
- ros::service::waitForService("/spawn"); //等待发现/spawn服务
- ros::ServiceClient add_turtle = nh.serviceClient<turtlesim::Spawn>("/spawn");
-
- turtlesim::Spawn srv;
- srv.request.x=2.0;
- srv.request.y=2.0;
- srv.request.name="turtle2";
- //请求服务调用
- ROS_INFO("Call service to spawn turtle[x:%0.6f, y:%0.6f, name:%s]",
- srv.request.x, srv.request.y, srv.request.name);
-
- add_turtle.call(srv);
-
- //显示服务调用结果
- ROS_INFO("Spawn turtle successfully [name:%s]",srv.response.name.c_str());
-
- return 0;
- }
3.发布方(发布两只乌龟的坐标信息)
- #include "ros/ros.h"
- #include "turtlesim/Pose.h"
- #include "tf2_ros/transform_broadcaster.h" //用于发布动态坐标消息
- #include "geometry_msgs/TransformStamped.h"
- #include "tf2/LinearMath/Quaternion.h" //欧拉角
-
- /*
- 订阅乌龟的位姿信息,转换成相对窗体的坐标
- 准备
- 话题:/turtle1/pose
- 消息:/turtlesim/Pose
- */
-
- //声明变量,接收传递的参数
- std::string turtle_name;
-
- void PoseCallback(const turtlesim::Pose::ConstPtr& pose)
- {
- //获取位姿信息,转化为坐标系相对关系并发布
- //创建TF发布对象
- static tf2_ros::TransformBroadcaster pub; //加static是为了防止每次进入回调函数都要重新定义一次
- //创建发布数据:从参数pose中进行转换
- geometry_msgs::TransformStamped ts;
-
- ts.header.frame_id="world"; //参考的坐标系(名字是固定的)
- ts.header.stamp=ros::Time::now();
- //=====turtle1和turtle2是动态传入的====
- ts.child_frame_id=turtle_name; //相对的坐标系(名字是固定的)
- //坐标系平移量的设置
- ts.transform.translation.x = pose->x; //这些值都可以通过rosmsg info turtlesim/Pose来查看的
- ts.transform.translation.y = pose->y;
- ts.transform.translation.z = 0;
- //坐标系四元数
- //乌龟是2D的,因此没有翻滚和俯仰角,因此乌龟的欧拉角为0,0,theta
- tf2::Quaternion qtn;
- qtn.setRPY(0,0,pose->theta);
- //设置四元数
- ts.transform.rotation.x=qtn.getX();
- ts.transform.rotation.y=qtn.getY();
- ts.transform.rotation.z=qtn.getZ();
- ts.transform.rotation.w=qtn.getW();
- //发布
- pub.sendTransform(ts);
- }
-
- int main(int argc, char *argv[])
- {
- setlocale(LC_ALL,"");
- ros::init(argc, argv, "dynamic_pub");
- ros::NodeHandle nh;
-
- /*
- 要想动态传入turtle1和turtle2,需要解析launch文件
- */
- if(argc !=2 )
- {
- ROS_ERROR("请传入一个参数");
- return 1;
- }
- else
- {
- turtle_name = argv[1];
- }
- //创建订阅对象
- //====turtle1和turtle2是动态传入的====
- //参数一:话题名称 参数二:队列长度 参数三:回调函数
- //注意:动态传入话题时,pose前要加/ !!!
- ros::Subscriber sub=nh.subscribe(turtle_name+"/pose",100,PoseCallback);
- ros::spin();
- return 0;
- }
4.控制乌龟跟随
- #include "ros/ros.h"
- #include "tf2_ros/transform_listener.h"
- #include "tf2_ros/buffer.h"
- #include "geometry_msgs/PoseStamped.h"
- #include "tf2_geometry_msgs/tf2_geometry_msgs.h"
- #include "geometry_msgs/TransformStamped.h"
- #include "geometry_msgs/Twist.h"
-
- /*
- 1.换算turtle1相对于turtle2的关系 2.计算角速度和线速度并发布
- */
- int main(int argc, char *argv[])
- {
- /* code */
- setlocale(LC_ALL,"");
- ros::init(argc, argv, "turtles");
- ros::NodeHandle nh;
- //创建订阅对象
- tf2_ros::Buffer buffer;
- tf2_ros::TransformListener sub(buffer);
-
- //创建发布对象
- ros::Publisher pub = nh.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel",100);
- //编写解析逻辑
- ros::Rate rate(10);
-
- while(ros::ok())
- {
- try //可以避免因为发布订阅不同步造成的报错
- {
- //计算son1与son2的相对关系
- /*buffer.lookupTransform()
- 参数1:根据该坐标系进行转化(父级)
- 参数2:原坐标系(子级)
- 参数3:何时的相对坐标
- 返回值:geometry_msgs::TransformStamped 子级相当于父级的相对坐标关系
- */
- geometry_msgs::TransformStamped son1toson2 = buffer.lookupTransform("turtle2","turtle1",ros::Time(0));
- ROS_INFO("turtle1 相对于 turtle2 的信息:父级%s 子级%s // 偏移量:%.2f, %.2f, %.2f",
- son1toson2.header.frame_id.c_str(),
- son1toson2.child_frame_id.c_str(),
- son1toson2.transform.translation.x,
- son1toson2.transform.translation.y,
- son1toson2.transform.translation.z);
-
- //根据相对坐标计算并组织速度消息
- geometry_msgs::Twist twist;
- /*
- twist.linear.x = 系数*开二次方(x^2+y^2)
- twist.angular.z = 系数*反正切(对边/邻边)
- */
- twist.linear.x = 0.5 * sqrt(pow(son1toson2.transform.translation.x,2)+pow(son1toson2.transform.translation.y,2));
- twist.angular.z = 4*atan2(son1toson2.transform.translation.y,son1toson2.transform.translation.x);
-
- //发布
- pub.publish(twist);
-
- }
- catch(const std::exception& e)
- {
- ROS_INFO("错误提示:%s",e.what());
- }
-
-
- rate.sleep();
- ros::spinOnce();
- }
- return 0;
- }
- 全国大学生智能汽车竞赛是以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程的实践活动,是教育部倡导的大学生A类科技竞赛之一。竞赛以立足培养,重在参与,鼓励探索,追求卓越为指导思想,培养大学生的创意性科技竞赛能力。本次... [详细]
赞
踩
- ubuntu下python代码开机自启动_ubuntu16.04python代码自启动和可执行文件自启动ubuntu16.04python代码自启动和可执行文件自启动1python代码自启动参考https://blog.csdn.net/q... [详细]
赞
踩
- ros_jestonjeston一.准备安装Ubuntu系统(在vmware上安装)#方便后面的调试首先,需要我们去官网下载镜像文件,但是由于官方的服务器搭建在境外,因此我们更倾向于使用国内镜像进行下载,比如清华大学镜像,一般来说,比较常用... [详细]
赞
踩
- 本教程基于JetsonxavierNx开发套件本教程参考Nvidia官方刷机教程制作启动盘在官方下载中心下载SD卡镜像并解压下载SDMemoryCardFormatter(需要划到页面最下方,点击【Accept】后方可开始下载)下载官方推荐... [详细]
赞
踩
- 因为大家算法能力还没到,细扣很难的算法,会把自己绕进去,就算别人给解释,只会激发出更多的问题和疑惑。所以大家先了解大体过程,知道这么回事,等自己有算法基础和思维了,在看多看几遍视频,慢慢就理解了。因为KMP算法很难,大家别奢求一次就把kmp... [详细]
赞
踩
- #include
usingnamespacestd;classA{public:intk;virtualvoidaa(){};};classB:publicA{public:intj;virtualvoidbb... [详细] 赞
踩
- 也就是说,前一行把中断打开,这一行打开定时器时钟,马上进了一次中断,然后就崩了...正常运行没问题,但是一旦用gdb来debug,开场很快就进hardfault。中断处理里面还在比较CCMR什么的寄存器呢,这些东西还没有被初始化。再往前推,... [详细]
赞
踩
- 通过JetsonTX2NX的GPIO接口控制继电器非常简单。只需要连接继电器模块到正确的GPIO引脚上,安装JetsonGPIO库,编写Python脚本并运行即可。这个技巧可以帮助实现各种下位机控制应用。_agxxavier支持gpio吗a... [详细]
赞
踩
- 原因:发现有一个设备正常,另一个设备通过TFTP下发web网页偶尔正常。打印排查下,发现读网页大小不对(估计用W25Q16弄的文件系统哪里bug,记录下,等以后处理)原因:浏览器下发命令,STM32上传web数据帧,网页数据比较大,有10K... [详细]
赞
踩
- 保存并关闭编辑器,crontab会自动加载更改并按照设定的计划运行myscript.sh脚本。请确保/path/to/myscript.sh是你脚本的实际绝对路径,并且脚本有执行权限。这个表达式的意思是,每隔5分钟(每小时的第0、5、10、... [详细]
赞
踩
- python轻松生成pdf文档_python生成pdfpython生成pdf前言python对办公一族来说,是个提高办公效率的得力利器。熟练使用它,可以轻松完成很多繁杂的事情。(文末送读者福利)它可以轻松地操作Word、Excel、PDF这... [详细]
赞
踩
- 以创建图片数据集为例,创建dataset的核心在于将图片文件夹转换为list类型,每个图片都是列表中的一个元素,因为转换为list类型,方便取值操作。本笔记是根据b站up“小土堆”的pytorch教程所作,笔记是根据自身的理解做的,并没有完... [详细]
赞
踩
- Windows系统搭建好Python的环境后,进入Python的安装目录,大家会发现目录中有python.exe和pythonw.exe两个程序它们到底有什么区别和联系呢?概括说明一下:python.exe在运行程序的时候,会弹出一个黑色的... [详细]
赞
踩
- 许多企业和机构选择将重要文件,如合同、报告等,保存为PDF格式以进行存储和管理。有时候,我们需要读取这些文档中的内容,包括文字和图片等,以便进一步分析文档内容、提取关键信息或将其集成到其他系统中。这篇文章将探讨如何通过Python实现PDF... [详细]
赞
踩
- 有人也许和我一样比较心急,想尽快知道如何去写一个具体的驱动程序,这里,假设您对驱动程序已经有比较好的了解,告诉大家一个快速上路的方法。当然,如果您有足够的时间我建议在动手之前还是深入了解一下CE整个系统架构。在CE中,最简单的一个驱动程序莫... [详细]
赞
踩
- 损失函数可以使用距离、规约方法和正则化方法来进行定制化。在下面的图表中,miner在批量中找到难训练的样本对的索引,这些索引被索引到距离矩阵。pytorch-metric-learning度量学习工具官方文档翻译基于Pytorch实现的度量... [详细]
赞
踩
- 使用pdfplumber、pdfminer、fitz/pymupdf三个库实现从PDF中提取文本,对比分析三个库的提取效率_python爬取pdf指定内容python爬取pdf指定内容目录前言一、pdfplumber二、pdfminer三、... [详细]
赞
踩
- c++的作用域局部域,类域,名字命名空间,文件域_c++作用域c++作用域这里写目录标题局部域类域类修饰指针由类限制修饰指向变量的指针由类修饰指向函数的指针命名空间背景:文件域c++支持四个域:局部域,类域,名字空间域,文件域局部域函数域这... [详细]
赞
踩
- 水下目标检测与传统路面目标检测有许多不同,具体体现在数据集较少,噪声影响大以及小目标较多等。首先是水下目标的数据集获取相对困难,而且杂乱无章。一般水下的图像获取方式采用的是声纳而非照相机,使得样本数据集少,而且不同海域生物种类差异很大,使得... [详细]
赞
踩
- python脚本自启动_python脚本开机自启动python脚本开机自启动step1:按ctrl+r打开终端,输入 shell:startup进入到程序启动目录step2:建立xxx.bat文件,内容如下:@echooffif"... [详细]
赞
踩

