
热门标签
热门文章
- 1代码+视频,手把手教你R语言ggrcs包绘制限制立方样条图+阈值效应分析_r语言限制立方样条如何找阈值
- 2软考高级之信息系统案例分析七重奏-《1》
- 32021-05-21 对比GO的Web框架Gin和Beego_beego gin
- 4WEB安全基础入门—操作系统命令注入(shell 注入)_文件参数 shell 命令注入
- 5剑指offer--面试题11
- 6《硬件设计指南-从器件认知到手机基带设计》正式上市!
- 7使用go来制作windows GUI图形界面 — Walk_golang walk教程
- 8Scrapy和Selenium整合(一文搞定)_scrapy selenium
- 9mysql查询语句实例 复杂mysql查询_mysql查询年龄在20到23的学生
- 10git一键清除不需要的本地分支_vscode 删除本地分支
当前位置: article > 正文
ros2配合yolov8具体实现
作者:算法设计者 | 2024-01-31 20:16:47
赞
踩
ros2配合yolov8具体实现
效果图
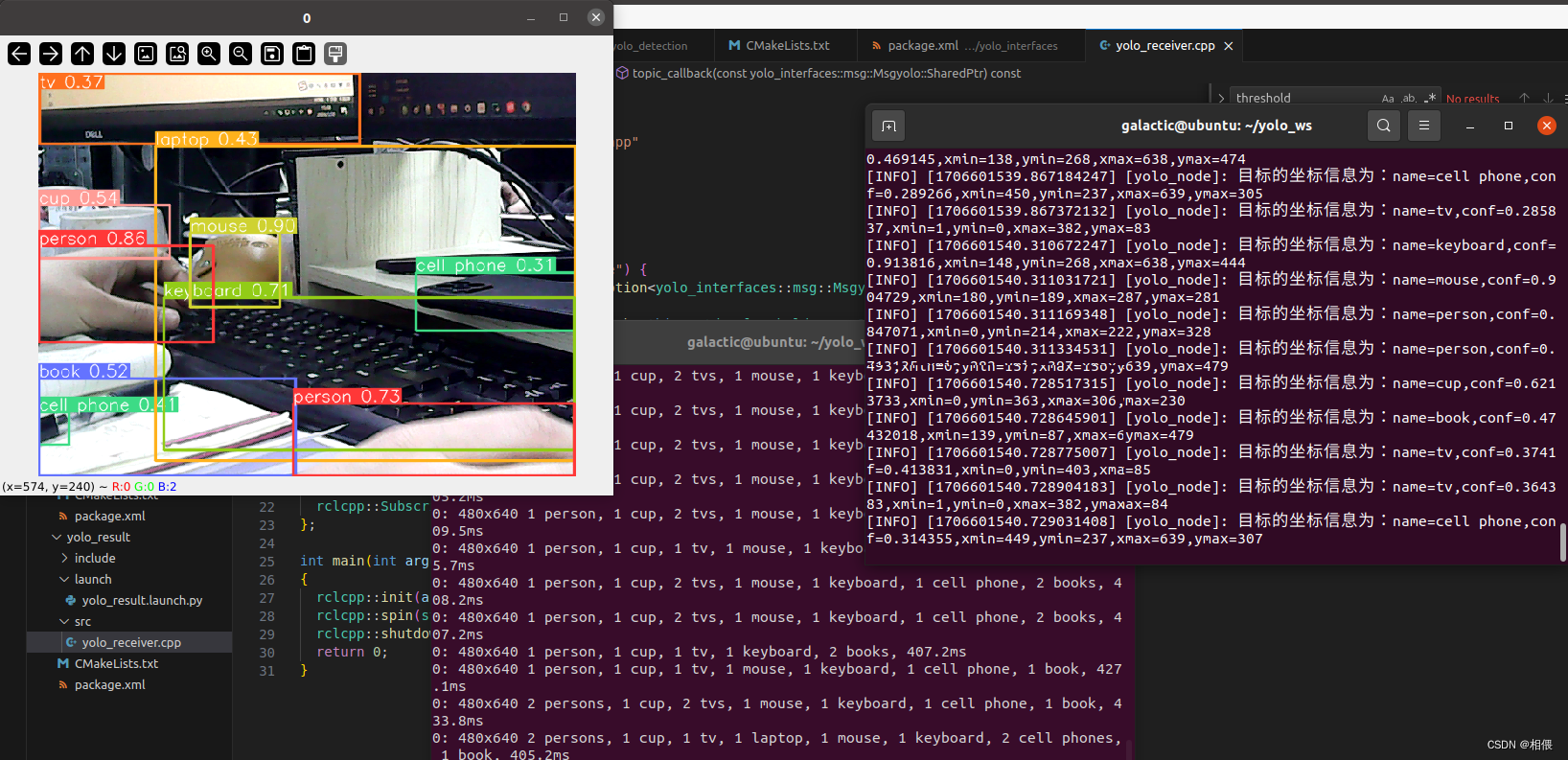
- 用yolov8实时检测物体,包括物体的类别,置信度和坐标
- 通过ros2发布出去
自定义消息
int64 xmin
int64 ymin
int64 xmax
int64 ymax
float32 conf
string name
- 1
- 2
- 3
- 4
- 5
- 6
发布端代码
from ultralytics import YOLO
import cv2
import rclpy
from yolo_interfaces.msg import Msgyolo
def main(args=None):
rclpy.init(args=args)
node = rclpy.create_node('yolo_pub')
pub = node.create_publisher(Msgyolo, 'msgyolo', 10)
model = YOLO("/home/galactic/yolo_ws/src/yolo_detection/resource/yolov8m.pt")
while rclpy.ok():
results = model.predict(source=0, show=True, stream=True)
for r in results:
preds = r.boxes.xyxy.cpu().numpy().astype('uint32')
for index, pred in enumerate(preds):
cl = int(r.boxes.cls[index].item())
# print('......', int(pred[0]), int(pred[1]), int(pred[2]), int(pred[3]))# 坐标位置
# print('name = ', r.names[cl])# 分类名称
# print('conf = ', r.boxes.conf[index])# 置信度
msg = Msgyolo()
msg.xmin = int(pred[0])
msg.ymin = int(pred[1])
msg.xmax = int(pred[2])
msg.ymax = int(pred[3])
msg.conf = float(r.boxes.conf[index])
msg.name = r.names[cl]
pub.publish(msg)
rclpy.spin_once(node)
rclpy.shutdown()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
订阅端代码
#include <rclcpp/rclcpp.hpp>
#include "yolo_interfaces/msg/msgyolo.hpp"
using namespace std::chrono_literals;
class YoloNode : public rclcpp::Node
{
public:
explicit YoloNode() : Node("yolo_node") {
subscriber_ = this->create_subscription<yolo_interfaces::msg::Msgyolo>(
"msgyolo", 10,
std::bind(&YoloNode::topic_callback, this, std::placeholders::_1));
}
private:
void topic_callback(const yolo_interfaces::msg::Msgyolo::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "目标的坐标信息为:name=%s,conf=%f,xmin=%d,ymin=%d,xmax=%d,ymax=%d",
msg->name.c_str(), msg->conf, msg->xmin, msg->ymin, msg->xmax, msg->ymax);
}
rclcpp::Subscription<yolo_interfaces::msg::Msgyolo>::SharedPtr subscriber_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<YoloNode>());
rclcpp::shutdown();
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/blog/article/detail/51995
推荐阅读
- YOLOv8是一种物体检测算法,是YOLO系列算法的最新版本。YOLO(YouOnlyLookOnce)是一种实时物体检测算法,其优势在于快速且准确的检测结果。YOLOv8在之前的版本基础上进行了一系列改进和优化,提高了检测速度和准确性。Y... [详细]
赞
踩
- 全球麦穗检测是植物表型分析领域的一个挑战,主要目标是检测图像中的小麦麦穗。这种检测在农业领域具有重要意义,可以帮助农民评估作物的健康状况和成熟度。然而,由于小麦麦穗在视觉上具有挑战性,准确检测它们是一项艰巨的任务。全球麦穗检测的挑战在于准确... [详细]
赞
踩
- article
Jetson Xavier NX 下 yolov8 tensorrt模型部署(Jetpack5.1.2、CUDA11.4、Cudnn8.6.0、Tensorrt8.5.2)_yolov8在jetson上部署
JetsonXavierNX下yolov8tensorrt模型部署流程记录及问题处理,本文使用的是TensorRT-Alpha封装库,基于tensorrt+cuda,实现模型的gpu加速。_yolov8在jetson上部署yolov8在je... [详细]赞
踩
- 1)iAFF加入Neck替代Concat;2)Conv替换为GhostConv;3)加入C3Ghost;YOLOv8-Seg改进:特征融合系列篇|多尺度特征融合iAFF,提升小目标检测能力|轻量级创新高效结合GhostConv... [详细]
赞
踩
- article
YOLOv8/YOLOv7/YOLOv5/YOLOv4/Faster-rcnn系列算法改进【NO.77】引入百度最新提出RT-DETR模型中AIFI模块_yolov8、v5、 fasterrcnn 改进插件rt-detr
引入百度最新提出RT-DETR模型中AIFI模块_yolov8、v5、fasterrcnn改进插件rt-detryolov8、v5、fasterrcnn改进插件rt-detr 前言作为当前先进的深度学习目标检测算法YOLOv8,已... [详细]赞
踩
- yolov8的环境搭建,和自定义训练集如何训练_yolov8训练自己的数据集yolov8训练自己的数据集记录一下yolov8的环境搭建,后续会更新v8模型的代码详解以及涨点改进策略。conda环境直接去yolov8官网:... [详细]
赞
踩
- YOLOv8是Ultralytics最新的基于YOLO的目标检测模型系列,提供最先进的性能。_yolov8训练自己的数据集yolov8训练自己的数据集本文实现了俩种环境的设置,一种是windows的CPU版本,还有服务器上的GPU版本。CP... [详细]
赞
踩
- YOLOv8是一种基于深度神经网络的目标检测算法,它是YOLO(YouOnlyLookOnce)系列目标检测算法的最新版本。YOLOv8的主要改进包括:更高的检测精度:通过引入更深的卷积神经网络和更多的特征层,YOLOv8可以在保持实时性的... [详细]
赞
踩
- 至此,整个训练预测阶段完成。此过程同样可以在linux系统上进行,在数据准备过程中需要仔细,保证最后得到的数据准确,最好是用显卡进行训练。有问题评论区见!_yolov8训练自己的数据集yolov8训练自己的数据集目录0、引言1、环境准备2、... [详细]
赞
踩
- 准备一份YOLO系列的数据集,这里就不演示voc转txt了,自己准备一个现成的就好。如果玩过YOLOv5的,数据集直接可以拿来用。数据集放在YOLOv8的大目录下data.yaml文件放在如图目录下yaml的格式可以仿照YOLOv8里的co... [详细]
赞
踩
- 图1.1:YOLOv8初始测试YOLOv8????于2023年1月10日由Ultralytics发布。它在计算机视觉方面提供了进展,带来了对我们感知、分析和理解视觉世界的巨大创新。它将为各个领域带来前所未有的可能性。在速度、准确性和架构方面... [详细]
赞
踩
 基于opencvC++推理yolov8模型(onnx),完整代码_yolov8c++yolov8c++TensorRT系列之Windows10下yolov8tensorrt模型加速部署TensorRT系列之Linux下yolov8tenso... [详细]
基于opencvC++推理yolov8模型(onnx),完整代码_yolov8c++yolov8c++TensorRT系列之Windows10下yolov8tensorrt模型加速部署TensorRT系列之Linux下yolov8tenso... [详细]赞
踩
- TensorRT通过优化深度学习模型来提高推理速度,减少延迟。这对于实时处理应用(如视频分析、机器人导航等)至关重要。:TensorRT优化了模型以在GPU上高效运行,这意味着更低的内存占用和更高的吞吐量。对于资源受限的环境或在多任务并行处... [详细]
赞
踩
- 该文主要是对yolov8的检测、分类、分割、姿态应用使用c++进行dll封装,并进行调用测试。_c++部署分类c++部署分类该文主要是对yolov8的检测、分类、分割、姿态应用使用c++进行dll封装,并进行调用测试。0.模型准备openv... [详细]
赞
踩
- article
【Yolov8 Opencv C++系列保姆教程】Yolov8 opencv c++ 版本保姆教程,Yolov8训练自己的数据集,实现红绿灯识别及红绿灯故障检测 ,红绿灯故障识别。_用c++ 调用 yolov8
Yolov8OpencvC++系列保姆教程,通过一个红绿灯识别的案例,实现了Yolov8的应用全流程的过程,整个算法最终只依赖了opencv,部署会更加方便、易用。基于Yolov8训练自己的数据集,实现红绿灯识别及红绿灯故障检测,红绿灯故障... [详细]赞
踩
- 但是我read模型的时候报错:ERRORduringprocessingnodewith2inputsand1outputs:[Reshape]:(/model.22/dfl/Reshape_output_0)fromdomain='ai.... [详细]
赞
踩
- YOLOV8C++opecv_dnn模块部署。opencv编译需时间久,GPU版本可实时,有问题私信留言。yolov8opencv废话不多说:opencv>=4.7.0opencv编译不做解释,需要的话翻看别的博主的编译教程代码饱含V... [详细]
赞
踩
- yolov8opencvdnn部署自己的模型yolov8opencvdnn部署自己的模型源码地址本人使用的opencvc++github代码,代码作者非本人使用github源码结合自己导出的onnx模型推理自己的视频推理条件windows1... [详细]
赞
踩
- YOLOv8一条龙安装教程,跟着此教程配置,都可以正常使用,如有问题,评论区提问_yolov8下载yolov8下载最近需要使用YOLOv8,百度了一下现在网上大多数教程都是比较早期的教程,很多文件已经大不相同,于是我根据官方readme文档... [详细]
赞
踩
- YOLOv8更换SEResNeXtBottleneck头检测头篇|原创自研|YOLOv8更换SEResNeXtBottleneck头|附详细结构图左图:ResNet的一个模块。右图:复杂度大致相同的ResNeXt模块,基数(cardinal... [详细]
赞
踩
相关标签

