
- 1RT-Thread: 移植RT-Thread,基于 STM32CubeMX 生成的 KEIL 工程_cubemx 移植rtthread
- 2Mysql一行记录存储过程
- 3基于TensorFlow和Keras的图像识别
- 4ROS系统——roslaunch发布4个realsense相机的4种方法_realsense ros topic 多个相机
- 5BASIC-24 VIP试题 龟兔赛跑预测_c++basic-24 龟兔赛跑预测
- 6Mac版微信3.0.0变身刷朋友圈(摸鱼)神器,教你如何下载_mac微信 朋友圈 摸鱼
- 7Android SharedPreference使用及原理分析
- 8深度学习介绍
- 951单片机矩阵键盘_51单片机lcd和矩阵按键
- 10Docker 安装 MinIO_docker 链接minio看看启动是否正常
双目+IMU标定详细流程、相关文件格式说明分析【T265为例】_怎样将bag包中的双目相机话题sensor_msgs/image转换成stereo/right/im
赞
踩
最近做一个无人机避障的项目,无人机上面安装了机载电脑,通过笔记本电脑进入机载电脑的桌面,使用提前写好地脚本运行VIO、路径规划、飞控和相机启动,在RVIZ中观察建图、定位和航迹点,并通过鼠标在地图上设置目标点,无人机即可自主前往。
本文主要描述一下机载传感器T265的远程标定流程,供日后参考:
1、录制并标定imu(realsense的launch文件已经修改好,环境也都配置好了)
一、基本情况
1)注意:本文是只是提纲式的描述了关键步骤和代码,我还写了一个D455远程标定的文章,感兴趣的话可以看看:D455远程标定详细步骤,使用kalibr、imu_utils两个开源工具_全日制学生混的博客-CSDN博客
2)笔记本电脑和机载电脑通过外置天线互联,通过ifconfig可以查找到地址
3)可以使用ssh或Nomachine进入机载电脑,这里为了可视化,我使用了后者
4)基本思路是:无人机录制bag,然后用无线传输把bag传到主机中运行标定程序,将标定结果再放到机载电脑的程序里(这样确实繁琐,但是在此项目中,考虑到批量部署和网络原因,这是目前我能找到的最好方法)
5)一些基本命令:april_6x6.yaml
- sudo apt install net-tools //网络工具
- ifconfig //找到飞机的ip地址
- ssh a@192.168.168.165 //查看远程命令窗口
- ping 192.168.168.165 //查看延迟
- scp a@192.168.168.165:/home/a/Downloads/autoFlight-master.zip . //拷贝文件到当前文件夹
- rs-enumerate-devices -c //查看相机出厂标定参数
6)标定板文件格式:
- #example for aprilgrid
- target_type: 'aprilgrid' #gridtype
- tagCols: 6 #number of apriltags
- tagRows: 6 #number of apriltags
- tagSize: 0.088 #size of apriltag, edge to edge [m]
- tagSpacing: 0.3 #ratio of space between tags to tagSize
- #example: tagSize=2m, spacing=0.5m --> tagSpacing=0.25[-]
-
- #example for checkerboard
- # targetType: 'checkerboard' #gridtype
- # targetCols: 6 #number of internal chessboard corners
- # targetRows: 7 #number of internal chessboard corners
- # rowsMetricSize: 0.06 #size of one chessboard square [m]
- # colsMetricSize: 0.06 #size of one chessboard square [m]
-
7) rs_t265.launch文件(更改发布话题、时间戳合并后)
- <!--
- Important Notice: For wheeled robots, odometer input is a requirement for robust
- and accurate tracking. The relevant APIs will be added to librealsense and
- ROS/realsense in upcoming releases. Currently, the API is available in the
- https://github.com/IntelRealSense/librealsense/blob/master/third-party/libtm/libtm/include/TrackingDevice.h#L508-L515.
- -->
- <launch>
- <arg name="serial_no" default=""/>
- <arg name="usb_port_id" default=""/>
- <arg name="device_type" default="t265"/>
- <arg name="json_file_path" default=""/>
- <arg name="camera" default="camera"/>
- <arg name="tf_prefix" default="$(arg camera)"/>
-
- <arg name="fisheye_width" default="848"/>
- <arg name="fisheye_height" default="800"/>
- <arg name="enable_fisheye1" default="true"/>
- <arg name="enable_fisheye2" default="true"/>
-
- <arg name="fisheye_fps" default="-1"/>
-
- <arg name="gyro_fps" default="-1"/>
- <arg name="accel_fps" default="-1"/>
- <arg name="enable_gyro" default="true"/>
- <arg name="enable_accel" default="true"/>
- <arg name="enable_pose" default="true"/>
-
- <arg name="enable_sync" default="true"/>
-
- <arg name="linear_accel_cov" default="0.01"/>
- <arg name="initial_reset" default="false"/>
- <arg name="reconnect_timeout" default="6.0"/>
- <arg name="unite_imu_method" default="linear_interpolation"/>
-
- <arg name="publish_odom_tf" default="true"/>
-
- <group ns="$(arg camera)">
- <include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
- <arg name="tf_prefix" value="$(arg tf_prefix)"/>
- <arg name="serial_no" value="$(arg serial_no)"/>
- <arg name="usb_port_id" value="$(arg usb_port_id)"/>
- <arg name="device_type" value="$(arg device_type)"/>
- <arg name="json_file_path" value="$(arg json_file_path)"/>
-
- <arg name="enable_sync" value="$(arg enable_sync)"/>
-
- <arg name="fisheye_width" value="$(arg fisheye_width)"/>
- <arg name="fisheye_height" value="$(arg fisheye_height)"/>
- <arg name="enable_fisheye1" value="$(arg enable_fisheye1)"/>
- <arg name="enable_fisheye2" value="$(arg enable_fisheye2)"/>
-
- <arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
- <arg name="gyro_fps" value="$(arg gyro_fps)"/>
- <arg name="accel_fps" value="$(arg accel_fps)"/>
- <arg name="enable_gyro" value="$(arg enable_gyro)"/>
- <arg name="enable_accel" value="$(arg enable_accel)"/>
- <arg name="enable_pose" value="$(arg enable_pose)"/>
-
- <arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/>
- <arg name="initial_reset" value="$(arg initial_reset)"/>
- <arg name="reconnect_timeout" value="$(arg reconnect_timeout)"/>
- <arg name="unite_imu_method" value="$(arg unite_imu_method)"/>
-
- <arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/>
- </include>
- </group>
- </launch>

二、具体操作
1、录制并标定imu(realsense的launch文件已经修改好,环境也都配置好了)
注意,在标定imu时,播放bag是可以加速的,不要傻乎乎的在机载电脑上录2h,然后再在笔记本电脑上再播放两个小时。加速的倍数根据你的电脑配置做调整,我的笔记本(拯救者r9000p)播放到1000倍速都没问题的。
- //录制
- rosbag record /imu/data -o imu_uav.bag –duration=2h
- scp a@192.168.168.165:/home/a/imu_uav.bag . 拷贝bag到主机
-
- //启动标定程序
- roslaunch imu_utils t265_imu.launch
- rosbag play -r 100 imu_uav.bag 一百倍速度播放
-
- //参考链接
- https://blog.csdn.net/CGJustDoIT/article/details/108081840
2、录制双目与联合标定所需bag
需要提前改好rs_t265.launch 主要更改:鱼眼相机话题发布、imu_unit => copy(imu标定的时候是linear..),把同步打开 <arg name="enable_sync" default="true"/>
录制bag的时候加了一个duration参数,因为我一个人标定,点鼠标之后再拿起无人机标定,然后再放下无人机点退出录制有些手忙脚乱,所以就直接限定了录制时间,然后在kalibr做标定的时候,只需要使用 “--bag-from-to 10 95” 掐头去尾即可。
- // 修改发布频率和话题名称:
- rosrun topic_tools throttle messages /camera/fisheye1/image_raw 20.0 /fisheye1
- rosrun topic_tools throttle messages /camera/fisheye2/image_raw 20.0 /fisheye2
- rosrun topic_tools throttle messages /camera/imu 200.0 /imu
-
- //录制
- rosbag record -O imu_cameras_calibration /fisheye1 /fisheye2 /imu -duration=100
-
- //拷贝过来
- scp a@192.168.168.165:/home/a/workspace/uav_ws/imu_cameras_calibration.bag .
-
- //至此就没有机载电脑什么事了,标定程序就在笔记本电脑上启动了
- //到时候只需要把标定结果放到机载电脑里就行
3、kalibr做双目标定
下面这行命令处理最基本的语句,还加了修饰:显示提取过程、增加对于不同步时间戳的容忍程度;关于这个容忍程度,加它的原因是,我们的双目相机两帧图像不是完全对齐的,所以要加一个,如果你的相机不加就能对齐那就不加,即使加了,你也不要把这个容忍程度改的太宽,否则会导致相隔几帧的左右目图像匹配到一起,轻则误差大,重则标定不收敛。
rosrun kalibr kalibr_calibrate_cameras --target ./april_6x6.yaml --bag ./imu_cameras_calibration.bag --bag-from-to 10 95 --models omni-radtan omni-radtan --topics /fisheye1 /fisheye2 --approx-sync 0.04 -show-extraction4、kalibr做联合标定
单独标定了IMU和双目后,接下来就是标定一下二者之间的外参,这一步需要把之前的标定结果放到这一步的执行目录中。需要注意的是,相机的标定输出结果(那个.yaml文件)可以直接拿来用,而IMU的标定由于用的是imu_utils,需要把结果整理成kalibr能够识别的格式。
rosrun kalibr kalibr_calibrate_imu_camera --target ./april_6x6.yaml --cam ./imu_cameras_calibration-camchain.yaml --imu ./imu.yaml --bag ./imu_cameras_calibration.bag --bag-from-to 10 95 --show-extraction5、标定完成
标定结束后,就可以得到IMU、双目和联合的参数
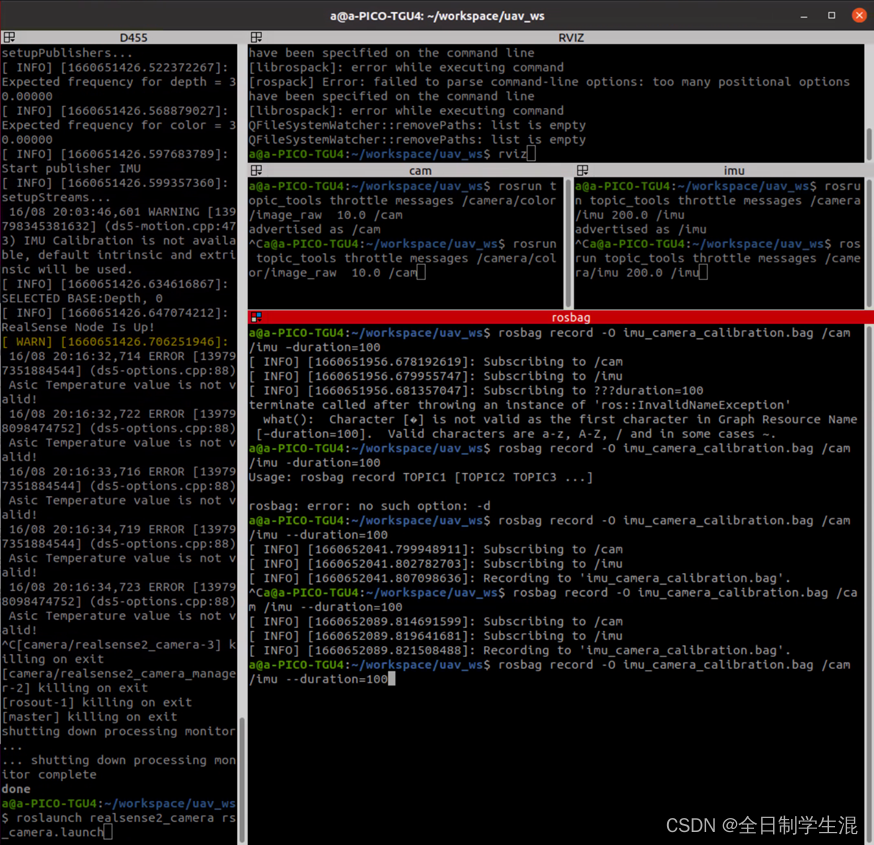
图 标定时的界面
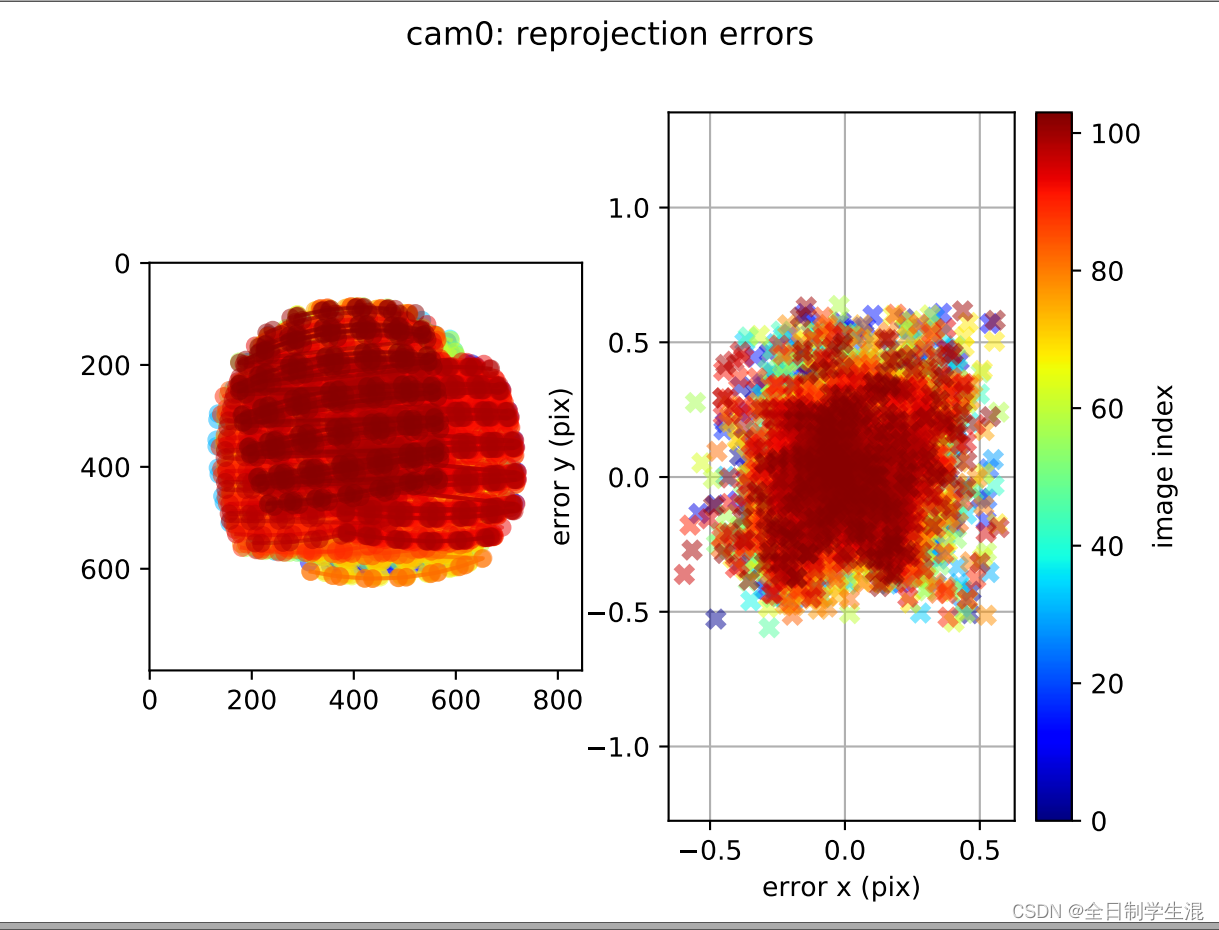
图 相机标定结果
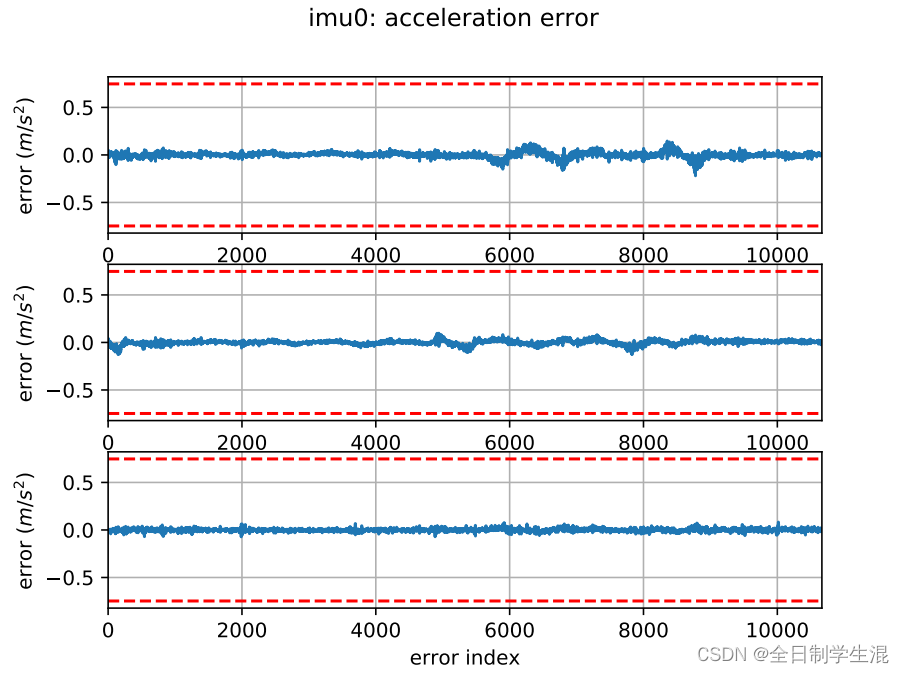
图IMU标定结果
6、参考文章
1:https://www.jianshu.com/p/194d6c9ef9a4
2:bmi055 标定_Ubuntu16.04+RealsenseT265跑通VINS-Fusion_之死的博客-CSDN博客
3:Kalibr 之 Camera-IMU 标定 (总结)_晨光ABC的博客-CSDN博客_kalibr标定
4:双目相机与IMU联合标定_合工大机器人实验室的博客-CSDN博客_双目相机和imu联合标定
- 论文原文地址:Cvae-gan:fine-grainedimagegenerationthroughasymmetrictraining_cvae-gan全称cvae-gan全称论文原文地址:CVAE-GAN:fine-grainedima... [详细]
赞
踩
- 1.检测模型将既不与原图相关也不与目标图相关的视觉概念看作是与伪造相关的视觉概念,性能良好的检测模型应该基于源/目标-无关的视觉概念来判断真伪。2.在标签的监督下,伪造-原图-目标图匹配可以帮助丢弃伪造无关视觉特征,隐式学习伪造相关的视觉概... [详细]
赞
踩
- 提到多进程渲染,通常会想到Chrome浏览器的多进程架构,其每个页面tab、插件都是运行在独立进程,并且有一个单独的GPU进程,这里最明显的好处是可以隔离各模块之间的耦合,即使某个进程卡顿、crash也不会影响到其它进程,从而提升系统整体的... [详细]
赞
踩
- nvidia-docker是一个可以使用GPU的docker,nvidia-docker是在docker上做了一层封装,通过nvidia-docker-plugin,然后调用到docker上,其最终实现的还是在docker的启动命令上携带一... [详细]
赞
踩
- 1.检查环境条件安装的先决条件要满足:GNU/Linuxx86_64withkernelversion>3.10Docker>=1.12NVIDIAGPUwithArchitecture>Fermi(2.1)NVIDIAdrivers~=3... [详细]
赞
踩
- imageProjection.cpp(激光雷达图像处理进程)主函数初始化ROS节点,创建一个图像进程类,以处理激光点云。开辟一个三线程的spinner以供三个订阅者使用,防止线程占用导致数据丢失。intmain(intargc,char*... [详细]
赞
踩
- 问题描述:在win10下用paddlepaddle运行pp-yolo系列模型,训练时报错:ppdet.data.source.cocoWARNING:Illegalimagefile:D:\xxx\xxx\...\xxx.png,andit... [详细]
赞
踩
- 本文使用两步微调训练了一个专门的图像标题生成器,并使用它重新生成了训练数据集的标题,以此改善文本到图像模型的提示跟随能力。基于此,构建了DALL-E3。_improvingimagegenerationwithbettercaptionsi... [详细]
赞
踩
- 文生图算法的文本理解能力,对于稍微复杂的文本,生成的图像往往会容易忽略部分文本描述,甚至无法生成文本所描述的图像,主要是训练数据集的caption不够准确,1.图像常规的文本描述过于简单(coco),大部分只描述图像中的主体而忽略图像中的其... [详细]
赞
踩
- OpenAI是推动大模型创新的领头羊,最近发布的DALLE3凭借着远超市面上其他图片生成模型的表现,再次火出圈。最近OpenAI官方发布了DALLE3的技术报告《ImprovingImageGenerationwithBetterCapti... [详细]
赞
踩
- 我们表明,通过对高度描述性生成的图像字幕进行训练,可以显著提高文本到图像模型的提示跟随能力。现有的文本到图像模型很难遵循详细的图像描述,并且经常忽略单词或混淆提示的含义。我们假设这个问题源于训练数据集中有噪声和不准确的图像字幕。我们通过训练... [详细]
赞
踩
- 整理了一些关于imagecaptioning的经典论文_fashioncaptioning:towardsgeneratingaccuratedescriptionswithsemanticrfashioncaptioning:toward... [详细]
赞
踩
- 本文将介绍3种技术,通过Maven把SpringBoot应用构建成Docker镜像。(1)使用spring-boot-maven-plugin内置的build-image.(2)使用Google的jib-maven-plugin。(3)使用... [详细]
赞
踩
- 硬件机载端:树莓派4B4/8G、T265、RPLIDAR-A2配套开发环境:树莓派系统Ubuntu20.04.3LTSRealSenseSDK2.0ROS系统版本:noetic+realsense-ros多平台远程登陆软件:nomachin... [详细]
赞
踩
- realsenset265和D435iROS版的驱动安装教程_ros2t265ros2t265安装librealsencehttps://blog.csdn.net/qq_43412584/article/details/108357706... [详细]
赞
踩
- article
Ubuntu 20.04+intel realense t265 (安装Realsense SDK和Realsense-ros)_ubuntu20.04 anzhuang realsense
这个安装的的是最新版本的librealsense。v2.54.1之后已经不能读取t265了所以安装第一个安装包。打开话题发布关掉realsense-viewer。传入ubuntu并改名为librealsense。安装realsensesdk... [详细]赞
踩
- 1.硬件飞控:Pixhawk6C机载电脑:Jetsonnano4GBB01视觉定位模块:IntelRealSenseT2652.软件操作系统:Ubantu18.04控制平台:ROS1melodic,MAVROS,realsense-ros。... [详细]
赞
踩
- T265安装全教程_t265t265参考文章:1、D435i-----Ubuntu18.04下D435i使用(SDK安装与测试)_d435i使用手册_杰尼君的博客-CSDN博客VIO视觉无人机室内定点自主飞行(T265+PX4+Mavros... [详细]
赞
踩
- 树莓派4B(4G/8G)安装Ubuntu18.04桌面版+ROS(Melodic)+RealsenseSDK(T265+D400系列)文章目录树莓派4B(4G/8G)安装Ubuntu18.04桌面版+ROS(Melodic)+Realsen... [详细]
赞
踩
- 背景本人最因工作原因接触到各种电路板,传感器,而自己又是一个小白,随意在其他朋友的推荐下决定从树莓派开始玩传感器;本例子为树莓派控制红外避障传感器材料1、树莓派4b2、红外避障模块3、导线操作1、通过xshell工具来连接树莓派4B,输入命... [详细]
赞
踩

