
- 1【FFmpeg】ffplay 命令行参数 ⑤ ( 设置音频滤镜 -af 参数 | 设置统计信息 -stats 参数 | 设置同步时钟类型 -sync 参数 )
- 2新版onenet平台安全鉴权的确定与使用_新版onenet没有鉴权
- 3Unity创建 .asset配置文件的方式_unity c# asset 配置
- 4openfeign实现远程调用_openfeign远程调用
- 5mysql数据同步及备份:解析mysqldump命令
- 6ZooKeeper源码分析之EventThread线程_zookeeper中eventthread线程 java.lang.thread.state: wa
- 7深入浅出CChart 每日一课——快乐高四第五十课 新石器时代,轻装上阵之EasyX窗口绘图_easyx和cchart
- 8Java设计模式——策略模式(Strategy Pattern)_java strategy pattern. describe the problem it is
- 9UE虚幻引擎云渲染支持8K方案_ue5 vr能播放8k 1.5g的视频吗
- 10蓝桥杯试题 算法训练 拿金币(C语言)_有一个n x n的方格,每一个格子都有一些金币,只要站在格子里就能拿到里面的金币。你站在最左上角的格
Ubuntu20.04安装realsense-viewer以及realsense-ros-development_ubuntu20.04 realsense
赞
踩
一、realsense-viewer
首先从源码处下载对应压缩包并解压
mirrors / intelrealsense / librealsense · GitCode
进入解压后的空间下,执行如下代码:
- sudo apt-get install librealsense2-dkms
- sudo apt-get install librealsense2-utils
-
- sudo apt-get install librealsense2-dev
- sudo apt-get install librealsense2-dbg
其实完成这一段,即使提示无法定位软件包dkms,也可以打开realsense-viewer了,如果打不开再进行后续的步骤。
- sudo apt-get install libudev-dev pkg-config libgtk-3-dev
- sudo apt-get install libusb-1.0-0-dev pkg-config
- sudo apt-get install libglfw3-dev
- sudo apt-get install libssl-dev
-
- sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
- sudo udevadm control --reload-rules && udevadm trigger
- mkdir build
- cd build
- cmake ../ -DBUILD_EXAMPLES=true
- make
- sudo make install
完成后即可启动realsense-viewer。
二、realsense-ros-development
安装realsense-ros-development的源码网址如下:
mirrors / intelrealsense / realsense-ros · GitCode
编译命令如下:
- cd ~/realsense_ws
- catkin_make clean
- catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
- catkin_make install
- echo "source ~/realsense_ws/devel/setup.bash" >> ~/.bashrc
- source ~/.bashrc
编译过程中可能会出现报错如下:

只需要将该功能包git下来以后放在realsense_ws/src下,重新进行编译工作即可。该功能包的调用命令如下:
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
编译安装完成后,运行launch文件会出现如下错误:
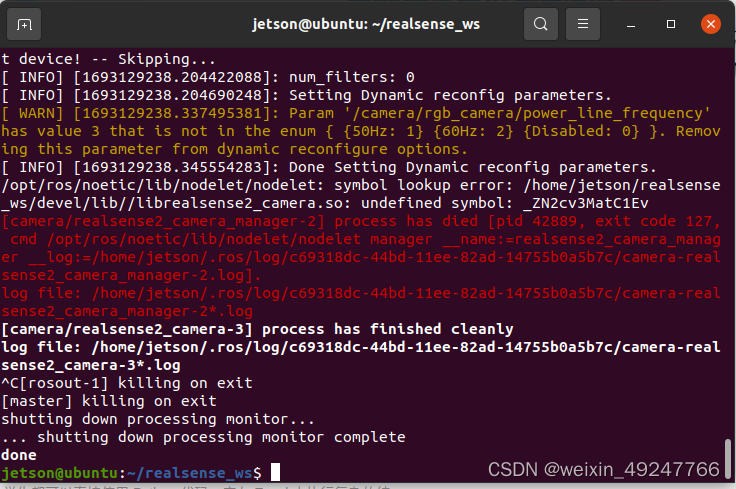
只需要修改以下realsense2_camera功能包下的Cmakelist文件即可。
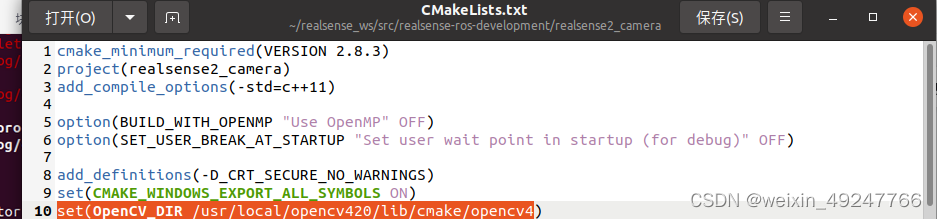
还需要修改CMakelist文件中如下两个地方,这两个地方是与路径无关的。
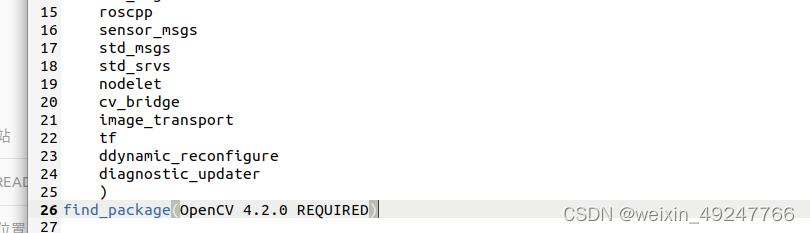

修改这三个地方后,重新编译运行即可。
可以使用locate命令对部分的文件所在位置进行定位。
如果没有locate命令,可以进行如下操作:
首先
sudo apt-get install locate
其次
sudo updatedb最后,使用locate
locate OpenCVConfig-version- https://my.oschina.net/zhenggao/blog/4338422Ubuntu20.04安装wxWidgets-3.1.3原SummerGao发布于07/0710:33字数397阅读278收藏0点赞0评论0mesaam... [详细]
赞
踩
 针对ubuntu20.04缺少网卡驱动和显卡驱动的问题,给出解决方案和坑点提示。_ubuntu显卡驱动wifiubuntu显卡驱动wifi前言: 2023年7月入职,ubuntu的小白,公司新配的电脑,里面都是旧版Ubuntu不能... [详细]
针对ubuntu20.04缺少网卡驱动和显卡驱动的问题,给出解决方案和坑点提示。_ubuntu显卡驱动wifiubuntu显卡驱动wifi前言: 2023年7月入职,ubuntu的小白,公司新配的电脑,里面都是旧版Ubuntu不能... [详细]赞
踩
- ubuntu20.04安装完没法连wifi,可能有如下两种原因,因为年这两种原因都排除了后成功获得联网功能,所以安安也不清楚具体是那个原因:1.启动了安全模式。2.没有安装网卡驱动。_ubuntu20.04没有连接wifi选项ubuntu2... [详细]
赞
踩
- 最近对一台联想的笔记本进行安装Ubuntu系统,本以为很顺利。没想到后面出现的很多的状况,本篇就来记录下遇到的坑及如何爬出坑完美运行。以下为本次的环境及硬件:1.环境:Ubuntu20.04(内核5.15.0-75-generic)+Win... [详细]
赞
踩
- article
win10 ubuntu20.04 双系统 装机指南 显卡驱动 输入法 wifi pytorch安装 和 vscode json设置_ubuntu20.04安装哪个版本的linux firmware
笔记本配置:联想拯救者2020-y7000p显卡:RTX2060建议直接安装ubuntu20.04版本,若装18.04版本或者19.0419.10,显卡驱动较难安装,本人在这四个版本中来回折腾,发现还是20.04版本好。其他驱动都选最新版本... [详细]赞
踩
- 解压压缩包后将其中的iwlwifi-ty-a0-gf-a0-59.ucode复制到这个新文件夹中。下载Intel®Wi-Fi6AX210160MHz。在backport-iwlwifi下新建一个文件夹。从英特尔官网下载固件。_ax211驱动... [详细]
赞
踩
- 纯净的ubuntu是没有gcc和make的,所以如果没有有线网,一定要先连上网络,否则离线安装这些库,依赖处理会很麻烦。我这里是用一台能无线上网的笔记本(Windows系统)用网线把网络共享给台式机。_ubuntu20.04安装无线网卡驱动... [详细]
赞
踩
- ubuntu20.04网卡驱动安装_wifi-6eax211160mhzubuntu20.04wifi-6eax211160mhzubuntu20.04文章目录前言一、问题描述二、有线网卡驱动安装1.确认电脑网卡型号,到[官网](https... [详细]
赞
踩
- ubuntu20.04双系统安装流程_ubuntu20.04双系统ubuntu20.04双系统文章目录ubuntu20.04双系统安装流程下载Ubuntu20.04制作U盘启动盘磁盘分盘进入BIOS页面ubuntu系统设置启动Ubuntu系... [详细]
赞
踩
- 如何使用docker+nvidia-docker搭建一个GPU共享服务器,主要讲解了笔者的操作环境,稍许的安装步骤,主要是docker的安装,以及nvidia-docker的安装,以及调用gpu超时的一个处理。_ubuntu20.04共享n... [详细]
赞
踩
- 1、显卡驱动安装。先确保你已经安装了NVIDIA的显卡驱动。你可以通过运行nvidia-smi命令来检查驱动是否已经安装。如果驱动已经安装,这个命令会显示你的GPU的详细信息。2、安装docker。确保docker已经正确安装。_ubunt... [详细]
赞
踩
- 如果nvidia-docker安装成功,命令将启动一个包含NVIDIAGPU的容器并运行nvidia-smi命令,该命令可以显示有关GPU状态的信息。输出结果将显示GPU型号、显存大小、温度等信息。如果命令成功运行并显示了有关GPU的信息,... [详细]
赞
踩
- 最近需要对JetsonOrin进行操作,在它的上面测试目标识别的程序。Orin采用的是通过镜像刻录的。在远程计算机用NoMachine输入IP地址连接Nano机器,就可以连接成功并进行远程操作。在一个局域网的情况下,Orin上成功安装NoM... [详细]
赞
踩
- UBUNTU安装CUDAtoolkit.cudnn_gtx1060支持cuda11.8吗gtx1060支持cuda11.8吗注意:不要采用之前安装在UBUNT18.04时所用的sudoubuntu-driversautoinstall命令自... [详细]
赞
踩
- 在一些AI项目中,往往通过接口对外提供服务,常用Docker来部署。在一些需要CUDA的场景,尽管有nvidia-docker容器可以使用,但配置过程相当繁琐。可替换的方案(前提是已安装nvidia驱动、cuda+cudnn、conda并创... [详细]
赞
踩
- Ubuntu20.04安装pytorch(包括安装Anaconda和虚拟环境配置以及安装包spikingjelly)_ubuntu安装pytorchubuntu安装pytorch为了防止自己遗忘安装过程,同时能对需要的人提供帮助,故写该教程... [详细]
赞
踩
- 执行如下命令:sudocurl-sSLhttps://raw.githubusercontent.com/ros/rosdistro/master/ros.key-o/usr/share/keyrings/ros-archive-keyri... [详细]
赞
踩
- 记录一下折磨了一周的ros2配置qaq以及踩的无数坑_ros2安装教程unbuntu20.04ros2安装教程unbuntu20.04记录一下折磨了一周的ros2配置qaq以及踩的无数坑第一次按照一个教程安装后,命令行输入sudoapt-u... [详细]
赞
踩
- 在编辑器中,你会看到当前的软件源列表。请根据你的Ubuntu版本进行相应的更改。保存文件并退出编辑器。_ubuntujammyzhongkedaubuntujammyzhongkeda打开软件源配置文件以编辑:sudonano/etc/ap... [详细]
赞
踩
- ubuntu20.04国内镜像源_ubuntu163源ubuntu163源Ubuntu20.04是Ubuntu的第8个LTS版本,其重大更新和改进将在2030年前终止,计划于2020年4月23日发布。国内有很多Ubuntu的镜像源,有阿里的... [详细]
赞
踩

