
- 1云计算——虚拟化层架构_虚拟化架构
- 2波折的2023年_联通数科面试通过一直不谈薪
- 3从腾讯外包到正式员工,我只用了一年时间。。。_外包进腾讯一般能做多久
- 4【MySQL | TCP】宝塔面板结合内网穿透实现公网远程访问
- 5111个Python数据分析实战项目,代码已跑通,数据可下载_python数据分析项目案例
- 6web3:区块链共识机制系列-POS(Proof of Stake)股权证明算法
- 72023年总结的web前端学习路线分享(学习导读)
- 8探索AIGC未来:CPU源码优化、多GPU编程与中国算力瓶颈与发展
- 9【Python】pyecharts 模块 ② ( 命令行安装 pyecharts 模块 | PyCharm 安装 pyecharts 模块 )
- 10【JAVA杂货铺】一文带你走进面向对象编程|继承|重载|重写|期末复习系列 | (中4)
【Unity】Unity 几何知识、弧度、三角函数、向量运算、点乘、叉乘_unity 计算角度
赞
踩
基础几何知识
角的度量方式
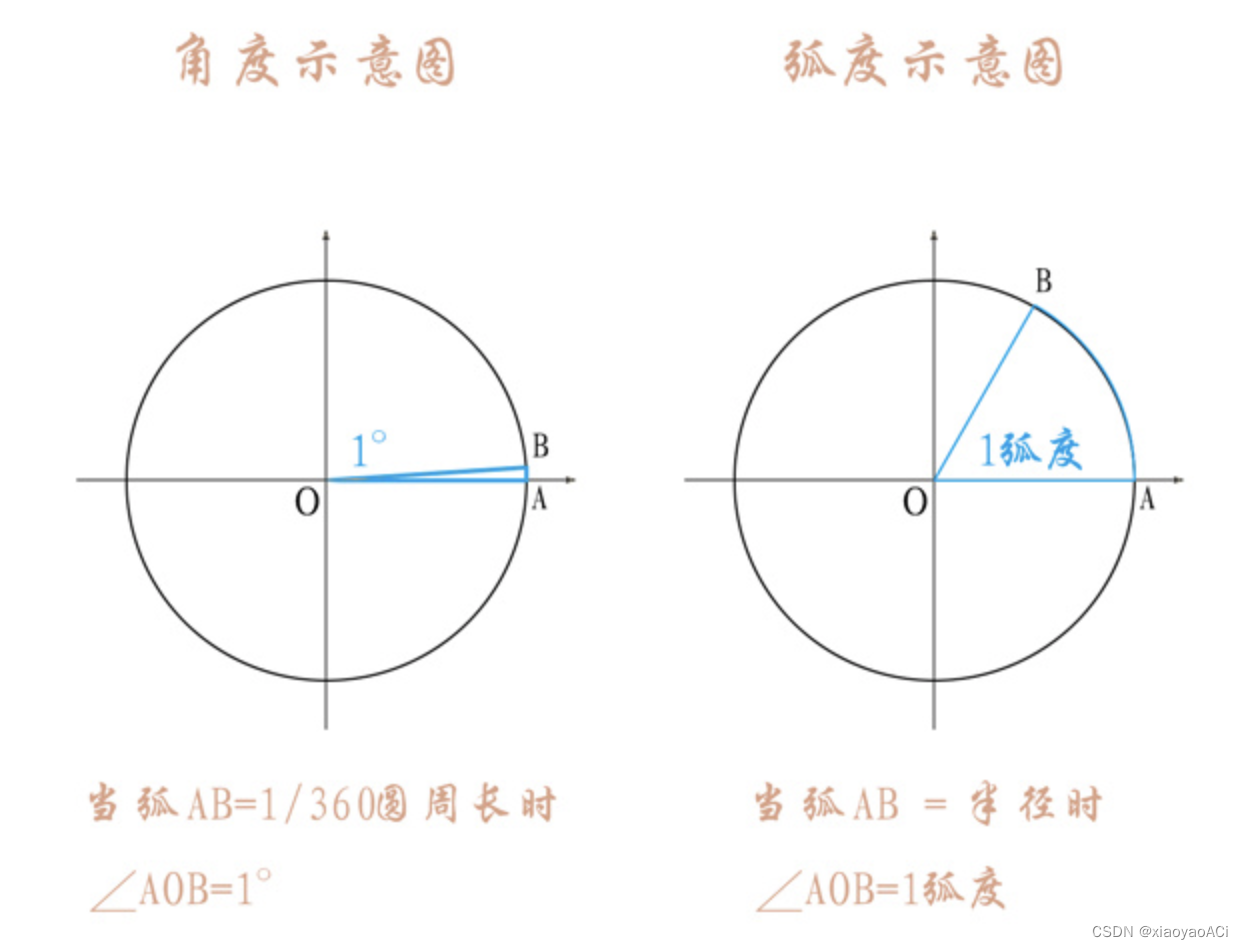
角的度量方式分为角度(Degree)和弧度(Radian)两种。角度就是将一个圆形切成360份,每一份就是1度角。弧度是当弧长等于圆的半径时即为1弧度。
如图所示:
角度弧度转换
常用换算:
π
=
180
度
\ \pi = 180度
π=180度
1
弧
度
=
180
度
/
π
\ 1弧度 = 180度 / \pi
1弧度=180度/π
1
角
度
=
π
/
180
度
\ 1角度 = \pi / 180度
1角度=π/180度
角度转弧度:
- 转换公式: 弧 度 = 角 度 数 ∗ π / 180 \ 弧度 = 角度数 * \pi / 180 弧度=角度数∗π/180
- Unity代码:radian = x * Mathf.Deg2Rad;
弧度转角度:
- 转换公式: 角 度 = 弧 度 数 ∗ 180 / π \ 角度 = 弧度数 * 180 / \pi 角度=弧度数∗180/π
- Unity代码:degree = x * Mathf.Rad2Deg;
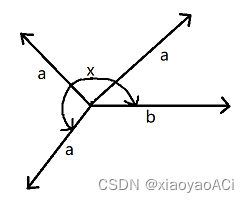
三角函数
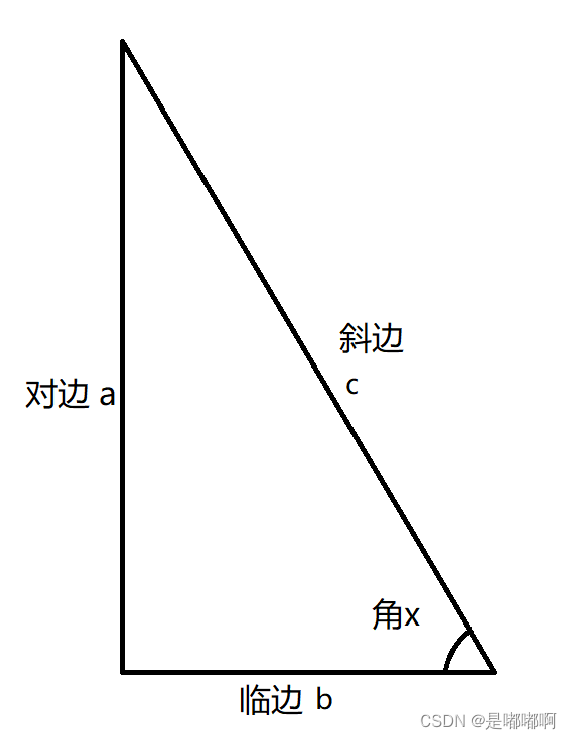
在直角三角形中(下图为例),如果 a 、 b 、 c 、 x \ a、b、c、x a、b、c、x中的两个变量已知则能计算出另外两个变量的值。
计算公式
正弦:
s
i
n
(
x
)
=
a
/
c
\ sin(x) = a / c
sin(x)=a/c (对比斜)
余弦:
c
o
s
(
x
)
=
b
/
c
\ cos(x) = b / c
cos(x)=b/c (临比斜)
正切:
t
a
n
(
x
)
=
a
/
b
\ tan(x) = a / b
tan(x)=a/b (对比临)
余切:
c
o
t
(
x
)
=
b
/
a
\ cot(x) = b / a
cot(x)=b/a
正割:
s
e
c
(
x
)
=
c
/
b
\ sec(x) = c / b
sec(x)=c/b
余割:
c
s
c
(
x
)
=
c
/
a
\ csc(x) = c / a
csc(x)=c/a
反正弦:
a
r
c
s
i
n
(
a
/
c
)
=
x
\ arcsin(a / c) = x
arcsin(a/c)=x
反余弦:
a
r
c
c
o
s
(
b
/
c
)
=
x
\ arccos(b / c) = x
arccos(b/c)=x
反正切:
a
r
c
t
a
n
(
a
/
b
)
=
x
\ arctan(a / b) = x
arctan(a/b)=x
已知一角和一边,求另外两边,用sin、cos、tan。
已知两边,求角,用arcsin、arccos、arctan。
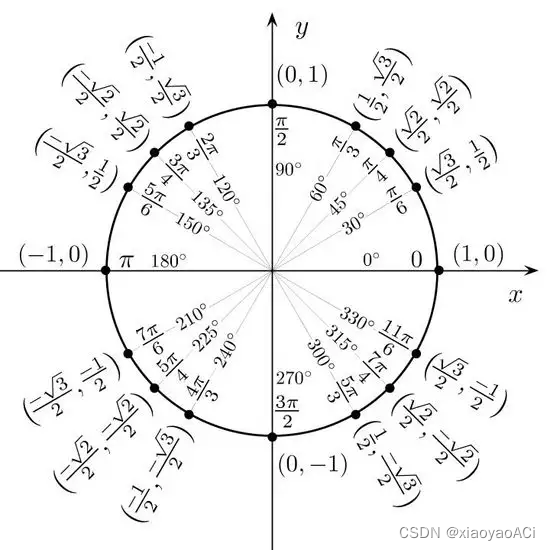
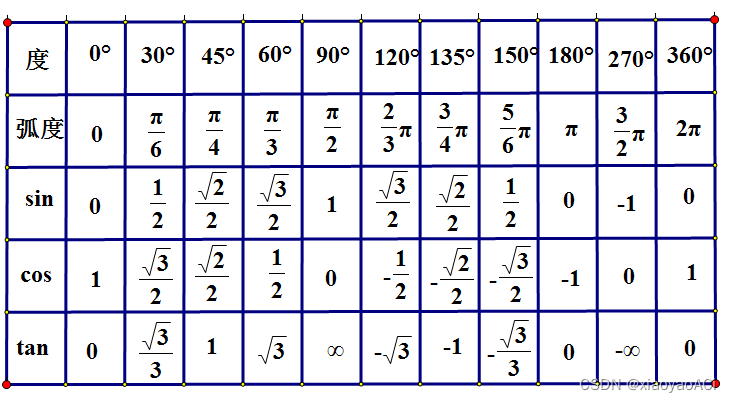
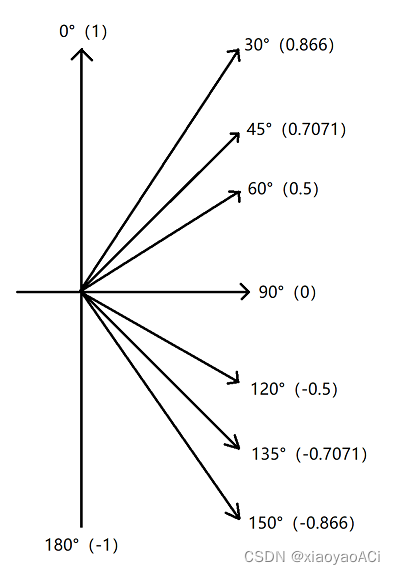
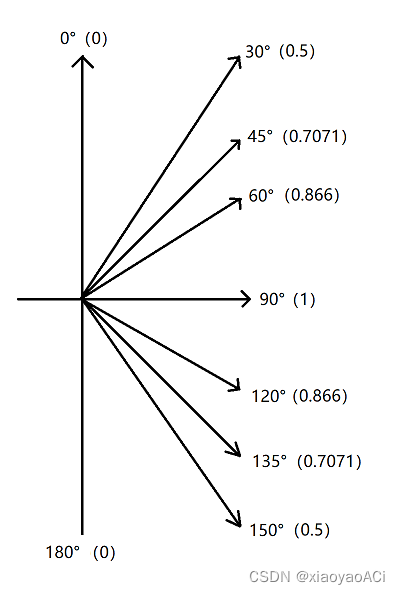
常用三角函数值
使用方法
已知一个角和一条边,用
s
i
n
、
c
o
s
、
t
a
n
\ sin、cos、tan
sin、cos、tan 。
已知两条边求角度,用
A
r
c
S
i
n
、
A
r
c
C
o
s
、
A
r
c
T
a
n
\ ArcSin、ArcCos、ArcTan
ArcSin、ArcCos、ArcTan 。
Unity应用
在代码中调用Mathf.Sin等三角函数方法时传入的参数并不是角度,而是弧度。
比如如果我们想要获取sin30度的值不能这样写:Mathf.Sin(30)。这样是错的。
正确的写法应该是Mathf.Sin(30 * Mathf.Deg2Rad),将角度转为弧度再传参,得到的结果就是0.5了。
下图为官方API的描述。

要求输入的角度是以弧度为单位的,所以要用这些方法时经常要用到角度和弧度的转换。
向量
向量是一个数字列表,表示各个维度上的有向位移。它是一个有大小有方向的物理量。大小就是方向的模长,方向描述了空间中向量的指向。向量可以用来表示物体的位置和方向。
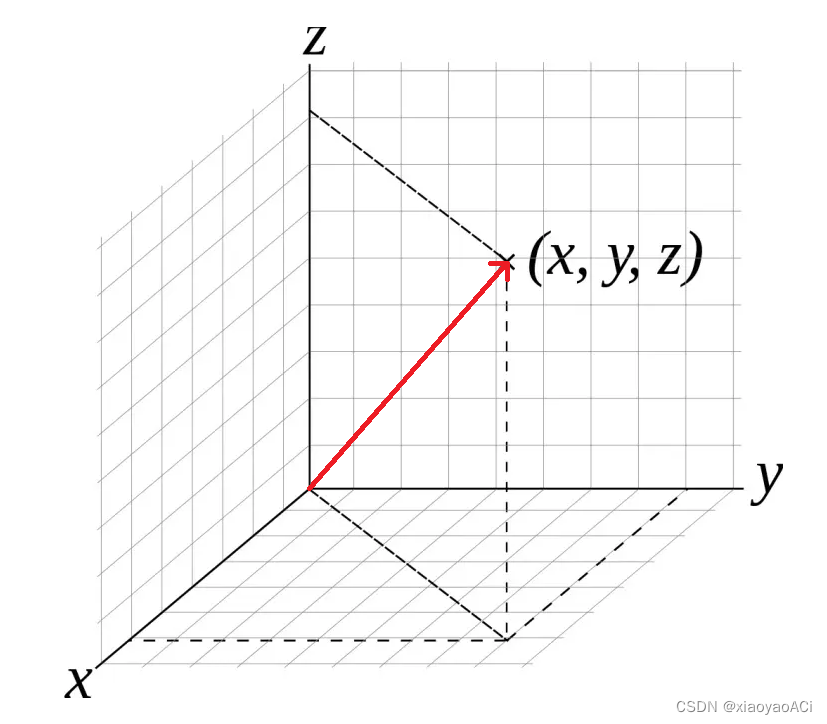
向量的大小:也就是向量的长度(一般称作为 模),向量a的模记为 ∣ a ⃗ ∣ \ | \vec a | ∣a ∣ ,若 a ⃗ = ( x , y , z ) \ \vec a = (x, y, z) a =(x,y,z) 则 ∣ a ⃗ ∣ = x 2 + y 2 + z 2 \ | \vec a | = \sqrt {x^2 + y^2 + z^2} ∣a ∣=x2+y2+z2 。代码中使用myVector.magnitude来获取向量的大小。
单位向量:即模为1的向量,在Unity中单位向量也就代表了向量的方向。可以记作 a ^ \widehat{a} a 。一个向量的单位向量,可以通过除以它模得到,即 a ^ = a ⃗ ∣ a ⃗ ∣ \widehat{a} = \frac {\vec a} {| \vec a |} a =∣a ∣a 。代码中使用myVector.normalized来获取向量的单位向量,也就是向量的方向。
零向量:即模为0的向量,零向量的方向是任意的。
相反向量:长度相等方向相反的向量, a ⃗ \ \vec a a 的相反向量为 − a ⃗ \ -\vec a −a 。
平行(共线)向量:方向相同或相反的非零向量,记作 a ⃗ / / b ⃗ \ \vec a // \vec b a //b 。
向量加减法
向量的加减就是向量对应分量的加减,类似于物理学中力的正交分解。
向量相减
向量相减等于各分量相减。
[ x 1 , y 1 , z 1 ] − [ x 2 , y 2 , z 2 ] = [ x 1 − x 2 , y 1 − y 2 , z 1 − z 2 ] \ [x1,y1,z1] - [x2,y2,z2] = [x1-x2 , y1-y2 , z1-z2] [x1,y1,z1]−[x2,y2,z2]=[x1−x2,y1−y2,z1−z2]
几何意义:向量a与向量b相减,结果理解为以b的终点为起点,以a的终点为终点的向量。方向由b指向a。
注意:我们可以把向量相减理解为a、b终点的连接,但实际上该向量准确起始位置应该是坐标原点。
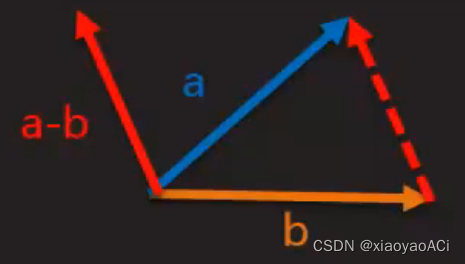
实际应用:计算两点之间的距离和相对方向。
向量相加
向量相加等于各分量相加。
[ x 1 , y 1 , z 1 ] + [ x 2 , y 2 , z 2 ] = [ x 1 + x 2 , y 1 + y 2 , z 1 + z 2 ] \ [x1,y1,z1] + [x2,y2,z2] = [x1+x2 , y1+y2 , z1+z2] [x1,y1,z1]+[x2,y2,z2]=[x1+x2,y1+y2,z1+z2]
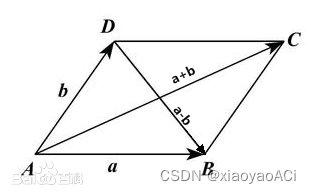
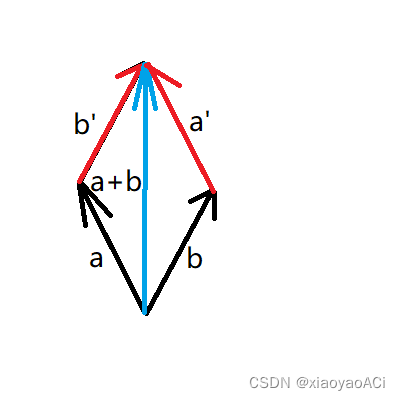
几何意义:如下图,假设空间中有两个向量a和b,a与a’平行且长度相等,b与b’平行且长度相等。a+b就相当于a,b,a’,b’所围成的平行四边形的对角线。
也可以这么说,由向量a的起点出发,沿着a的方向走a的长度,然后沿着b的方向走b的长度,达到的点相当于从a的起点沿着a+b的方向走a+b的长度。
实际应用:物体的移动。
向量与标量的乘除
乘法:该向量的各分量与标量相乘
k
[
x
,
y
,
z
]
=
[
x
k
,
y
k
,
z
k
]
\ k[x, y, z] = [xk, yk, zk]
k[x,y,z]=[xk,yk,zk] 。
除法:该向量的各分量与标量相除
[
x
,
y
,
z
]
/
k
=
[
x
/
k
,
y
/
k
,
z
/
k
]
\ [x, y, z]/k = [x/k , y/k , z/k]
[x,y,z]/k=[x/k,y/k,z/k] 。
几何意义:缩放向量长度。
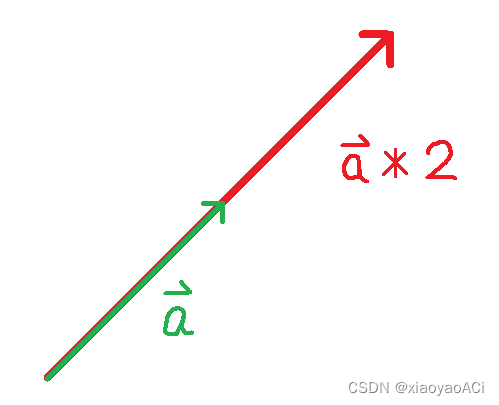
实际应用:加速、减速、放大、缩小。
点乘
点乘又称点积或内积。表示为各分量的乘积和。
[ x 1 , y 1 , z 1 ] ⋅ [ x 2 , y 2 , z 2 ] = x 1 x 2 + y 1 y 2 + z 1 z 2 \ [x1,y1,z1] \cdot [x2,y2,z2] = x1x2+y1y2+z1z2 [x1,y1,z1]⋅[x2,y2,z2]=x1x2+y1y2+z1z2
注意结果不是一个向量,而是一个标量(Scalar),可以是负数。
几何意义: a ⋅ b = ∣ a ∣ ∣ b ∣ cos ( a , b ) \ a \cdot b = |a||b|\cos(a, b) a⋅b=∣a∣∣b∣cos(a,b) 当a、b的模为1时,ab的点乘值为∠ab的cos值,再通过反余弦就可以获得角度。
// 计算点乘值
float dot = Vector3.Dot(a.position.normalized, b.position.normalized);
// 计算夹角
float angle = Mathf.Acos(dot) * Mathf.Rad2Deg;
- 1
- 2
- 3
- 4
第一步计算点乘值,第二步计算夹角。
实际应用:计算两向量的夹角。
点乘常用结果:对于标准化后的向量,方向相同,则点乘为1;方向相反,则点乘为-1;互相垂直,则点乘为0。
总结:点乘可以用于计算向量夹角,但只能用于计算内夹角,也就是小于180°的夹角。若想超过180°,则需要与叉乘结合。点乘的结果为单个数值。
叉乘
叉乘又称 “叉积” 或 “外积” ,与点乘结果不同,叉乘结果是一个向量,一个垂直于两个向量所组成平面的向量。模长为两向量模长乘积再乘夹角的正弦值。
公式: [ x 1 , y 1 , z 1 ] × [ x 2 , y 2 , z 2 ] = [ y 1 ∗ z 1 − z 1 ∗ y 2 , z 1 ∗ x 2 − x 1 ∗ z 2 , x 1 ∗ y 2 − y 1 ∗ x 2 ] \ [x1,y1,z1] \times [x2,y2,z2] = [y1*z1 - z1*y2 , z1*x2 - x1*z2 , x1*y2 - y1*x2] [x1,y1,z1]×[x2,y2,z2]=[y1∗z1−z1∗y2,z1∗x2−x1∗z2,x1∗y2−y1∗x2]
代码:Vector3 cross = Vector3.Cross(a.position, b.position);
注意:叉乘不需要加normalized,加不加都不会影响结果。
应用:
- 创建垂直于平面的向量;
- 判断两条向量的相对位置。
叉乘获得垂直向量
-
当 a 到 b 顺时针,则 a x b 朝上。
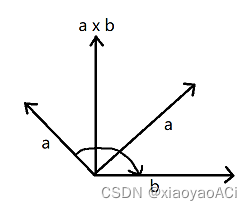
-
当 a 到 b 逆时针,则 a x b 朝下。
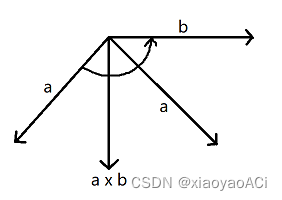
也可以这样理解:当a、b顺时针夹角小于180时, a x b 朝上;当a、b顺时针夹角大于180时, a x b 朝下。
代码判断:叉乘结果 y > 0 ,则朝上,则小于180°;叉乘结果 y < 0 ,则朝下,则大于180°;
左手规则
a、b向量叉乘获得的垂直向量遵循左手规则,以下图为例:
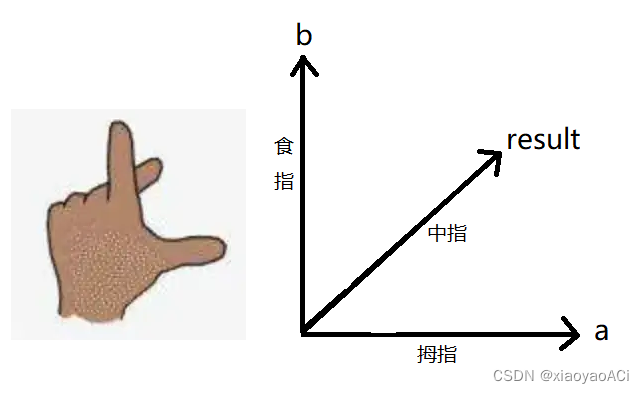
以上图手势为标准,垂直于拇指a和食指b形成的平面的向量result就是a、b叉乘的结果。
叉乘计算角度
叉乘也可以用来计算角度,但只能计算0° ~ 90°。
// 计算叉乘结果,叉乘不需要加normalized,但加了也不会有影响
Vector3 cross = Vector3.Cross(a.position, b.position);
// 用叉乘结果换算角度
float angle = Mathf.Asin(cross.magnitude) * Mathf.Rad2Deg;
- 1
- 2
- 3
- 4
- 5
叉乘常用结果:
计算360°以内的角(点乘结合叉乘)
点乘结合叉乘,可以计算出360°以内的角。
// 先用点乘计算角度(180°以内)
float dot = Vector3.Dot(a.position.normalized, b.position.normalized);
float angleX = Mathf.Acos(dot) * Mathf.Rad2Deg;
// 再用叉乘后的y值确定方向
Vector3 cross = Vector3.Cross(a.position, b.position);
if (cross.y < 0)
{
angleX = 360 - angleX;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
先用点乘计算角度(180°以内),再用叉乘后的 y 值确定方向,得数 angleX 为 a 顺时针到 b 的角度。
Vector3
Unity中通常用Vector3类来表示向量,该类的使用方法可以参考我的另外一篇文章:【Unity】Unity常用类:向量Vector3、四元数Quaternion
更多内容请查看总目录【Unity】Unity学习笔记目录整理
- Billboard一般应用于:单位顶部的血条,名字等树,草3D中场景中的2D人物(如:《饥荒》)粒子特效ReferencesUnityShader实例10:广告牌(Billboard)材质HeatDistortionShaderTutori... [详细]
赞
踩
- 当我们向List中添加元素时,如果当前的内部数组容量不足以容纳新的元素,Unity会自动分配更大的内存块,并将旧的元素复制到新的内存中,这个过程被称为扩容。综上所述,List作为动态数组的实现,在处理元素的添加、删除和随机访问时具有显著的优... [详细]
赞
踩
- 需求:数组中按顺序每次取5个,到最后,如果取不到,从头开始取intk=0;//5个5个一取privateList
赞
踩
- Unity工具类,自己整理的一些游戏开发可能用到的模块,单独独立使用,方便游戏开发。这里简单的介绍讯飞大模型的封装和使用,进行聊天。“讯飞星火认知大模型”是科大讯飞发布的产品,具有7大核心能力,即文本生成、语言理解、知识问答、逻辑推理、数学... [详细]
赞
踩
- ShaderGraph是Unity中的一个可视化工具,用于创建和编辑图形着色器。其意义在于简化编写复杂着色器的过程,减少对具体编程语言的依赖,使艺术家和设计师可以更方便地创建各种美术效果。使用ShaderGraph可以通过图形界面设置着色器... [详细]
赞
踩
- 自行创建pico安卓应用的全流程,包含手柄操作视角移动旋转等_picounityintegrationsdk开发picounityintegrationsdk开发文章目录版本说明环境搭建导出及相关设置手柄控制移动和旋转按右手柄B、A键设定位... [详细]
赞
踩
 GUILayout类是UnityGUI的接口,并且具有自动布局功能。固定布局模式和自动布局模式。不必使用一种布局模式来替代另一种布局模式,可在同一OnGUI()函数中同时使用这两种模式。当有预先设计好的界面可供使用时,采用固定布局比较合理。... [详细]
GUILayout类是UnityGUI的接口,并且具有自动布局功能。固定布局模式和自动布局模式。不必使用一种布局模式来替代另一种布局模式,可在同一OnGUI()函数中同时使用这两种模式。当有预先设计好的界面可供使用时,采用固定布局比较合理。... [详细]赞
踩
 专门用于编辑器界面的GUI类,提供了Unity内置类或结构体的控件函数,比如Color类、Vector3类等定义的控件。为编辑器在Inspector和EditorWindow中扩展提供了很大的方便。_editorguilayout.curv... [详细]
专门用于编辑器界面的GUI类,提供了Unity内置类或结构体的控件函数,比如Color类、Vector3类等定义的控件。为编辑器在Inspector和EditorWindow中扩展提供了很大的方便。_editorguilayout.curv... [详细]赞
踩
- 本文参自:http://mp.weixin.qq.com/s/Y5Rn5Y-5o-SB73z7Kc5f_Q本文为本人学习上连接的笔记有改动,请点击以上链接查看原文,尊重楼主知识产权。自定义Inspector属性面板官方连接:http://w... [详细]
赞
踩
- 经过学习,发现GUILayout类,EditorGUILayout类在混合使用。并且这两个类有很多的控件并不知到如何使用。下面决定深入学习。GUILayout控件列表 Button 按钮 Label 创建一个自动布局标签。 S... [详细]
赞
踩
- 本文参自:http://mp.weixin.qq.com/s/tMSAIND4Pq0farn2jY8rwg本文为本人学习上连接的笔记有改动,请点击以上链接查看原文,尊重楼主知识产权。UnityEditor自定义窗口目标:1.了解一些属性的使... [详细]
赞
踩
- EditorGUILayout:提供了一些Unity内置类或结构体的布局组件,比如为Color类型、Vector3类型等定义的组件,为编辑器在Inspcctor和EditorWindow中的扩展提供了很大的方便;EditorGUILayou... [详细]
赞
踩
- Unity编辑器拓展,创建自定义窗口,对窗口进行UI布局_unityguilayoutunityguilayoutUnity脚本API中文版链接:https://docs.unity3d.com/cn/2019.4/ScriptRefere... [详细]
赞
踩
- 3DGaussianSplatting最近真的是太热了,想看看重建出来是什么样子的,于是就参考网络上各位大神给的教程进行复现。我先在Ubuntu20.04系统上进行复现,环境配置安装成功,也可以进行训练,就是在编译可视化界面时一直cmake... [详细]
赞
踩
- article
【Unity】无法正常启动项目—>All compiler errors have to be fixed before entering playmode_all compiler errors have to be fixed before you ca
 打开项目后启动项目无法启动报错。_allcompilererrorshavetobefixedbeforeyoucanenterplaymode!unityediallcompilererrorshavetobefixedbeforeyou... [详细]
打开项目后启动项目无法启动报错。_allcompilererrorshavetobefixedbeforeyoucanenterplaymode!unityediallcompilererrorshavetobefixedbeforeyou... [详细]赞
踩
- Allcomplier(编译器)errorshavetobefixedbeforeyoucanenterplaymode。Console窗口报错:errorCS1002:;expected_allconpilererrorshaveallc... [详细]
赞
踩
- Unity已解决(compilererror)问题描述:导入karting时无法按下play键,会在game页面中央提示编译问题,注意到数种可能:和第一次勾选情况不同:第一次基本全部勾选,这里勾选项比较少,但是不能手动点,可能不是加载项的问... [详细]
赞
踩
- 简述在使用Unity2018以上的版本时,在ImportPackage,不再有官方的资源包了,变成了只有一个自定义包的选项,那我们应该怎么使用官方的标准资源包呢?简述在使用Unity2018以上的版本时,在ImportPackage,不再有... [详细]
赞
踩
- 类上面添加一行[CreateAssetMenu(fileName="Bullet",menuName="NewBullet",order=1)]作用在Assets文件夹下,鼠标右键,菜单栏中添加一个按钮项,菜单名为menuName,并执行生... [详细]
赞
踩
- 先上代码usingSystem.Collections.Generic;usingUnityEngine;[CreateAssetMenu(menuName="FPS/FootstepAudioData")]//配置右键菜单栏publicc... [详细]
赞
踩

