
- 1【pytorch】深度学习模型调参策略(四):鉴别并解决训练中的不收敛及不稳定的情况_grad_norm越来越大
- 2微信公众号运营推广基础入门知识_微信公众号运营推广需要了解什么
- 3Node.js基础入门_node build
- 4机器学习笔记(4)—逻辑回归(Logistic Regression)
- 5openpyxl——多表合并以及数据汇总_openpyxl合并单元格并写入数据
- 6阿里P8架构师得意弟子,应聘华为Java岗居然一面就失败了?_阿里p8 去华为 面试经历
- 7玩一玩小批量随机梯度下降(Mini Batch SGD)
- 8Python实现文件搜索_python查找文件
- 9使用frp进行内网穿透,让本地HTTP网站公开访问_frp toml
- 10springboot中Excel文件导出_springboot excel导出
算法-分枝限界法:广度优先搜索(0-1背包问题&迷宫问题)_优先队列式分支限界法求解0-1背包问题的時間複雜度
赞
踩
目录
如果看完觉得这篇文章对你有帮助的话,请点个赞支持一下~
1 设计思想
1.1 定义
- 以广度优先方式搜索解空间树,并结合限界函数提高搜索效率。
- 求解目标:找出满足约束条件的一个解,或在满足约束条件的解中选取某种意义上的最优解。
1.2 策略
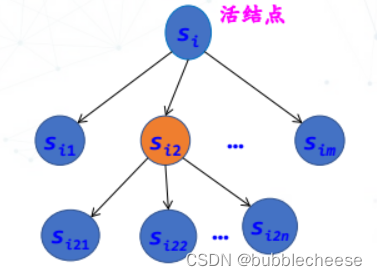
采用广度优先的策略,依次生成所有子节点。
① 设计一个限界函数,计算各节点的值,把符合限界条件的节点放入活节点表HT中。使用队列或优先队列,先进先出。
当可行解不止一个时,为衡量这些可行解的优劣,需要通过目标函数来进行评价。
② 对于待处理的节点,根据限界函数估算目标函数的可能取值,从中选取使目标函数取得极值(极大或极小)的节点进行广度优先搜索。
也就是说,每次都选择“最有利”的一个子节点作为优先扩展节点,一次性将这个节点的子节点全部展开,然后继续根据步骤①②对新展开的子节点进行选取。
③ 使搜索朝着解空间树上有最优解的方向前进,由此尽快找到问题的解。
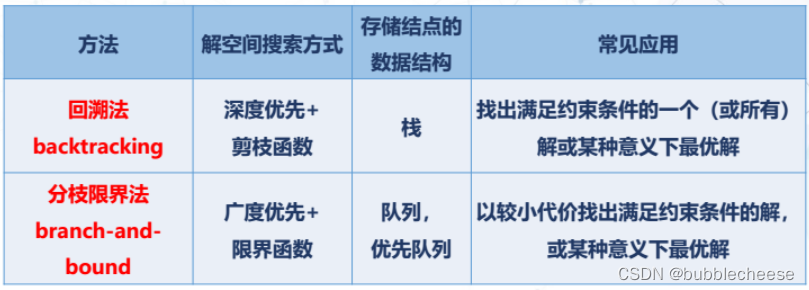
1.3 分枝限界法与回溯法的异同
- 相同点:都在问题的解空间树中搜索问题的解
- 不同点:
2 设计步骤
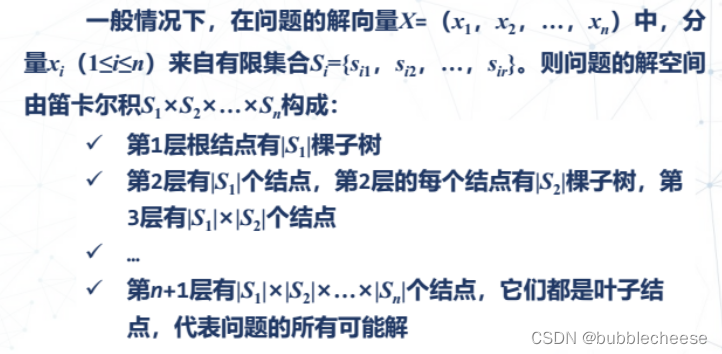
- 确定解空间结构:定义问题的解空间,确定易于搜索的解空间结构。
- 设计限界函数:确定目标函数值的估算方法。(关键)
- 广度优先搜索:根据限界函数,以广度优先方式搜索解空间树,避免无效搜索,从而得到最优解。
2.1 关键问题解决
- 设计合适的限界函数:
① 估算目标函数值,选取“最有利”的一个子节点作为扩展节点并删除不必要的子节点,简化搜索。要求计算简单、保证最优解在搜索空间中、在搜索早期对不合条件的进行剪枝。
② 方法:具体分析
a.目标函数求最大值:设计估算目标函数上界的限界函数。通常根节点的ub≥最优解的ub。若
是
的父节点,则
。
得到一个可行解的后,将所有小于
b.目标函数求最小值:设计估算目标函数下界的限界函数。通常根节点的lb≥最优解的lb。若
。
得到一个可行解的后,将所有大于
- 组织活节点表:
用于存放满足限界条件的节点。不同组织方式对应不同搜索方式。
① 队列式:将活节点表组织成队列,按照先进先出原则取下一个扩展节点。
② 优先队列式:将活节点表组织成优先队列,按优先队列排序后的优先级选取下一个扩展节点。可选择小根堆or大根堆。- 确定最优解向量:
因为节点处理是跳跃式的,因此搜索到某个叶子节点且对应一个最优解,采用以下两种方式求最优解的各个分量:
① 对每个扩展结点保存从根节点到该节点的路径:比较浪费空间,但实现简单,较常用。
② 在搜索过程中构建搜索经过的树结构:需要给每个节点增加一个指向父节点的指针,当找到最优值时,通过该指针找到对应的最优解向量。
Q:学习过程中的疑惑:为什么广度优先搜索之后的结果就是最优解?
因为广度优先搜索是每搜索到一个节点就扩展它的全部子节点,也就是说,广度优先搜索方法是一层一层依次搜索的。这样的话,只要到达叶子节点,搜索结束,所得到的层数就是最小的,即路径是最短的。
换句话说,如果在搜索过程中已经找到了终点,那么此时的路径一定是从起点开始的最优路径。因为如果路径不是最优路径,那么一定有其他路径更早到达叶子节点,也就比此时已经搜索到的路径更短。
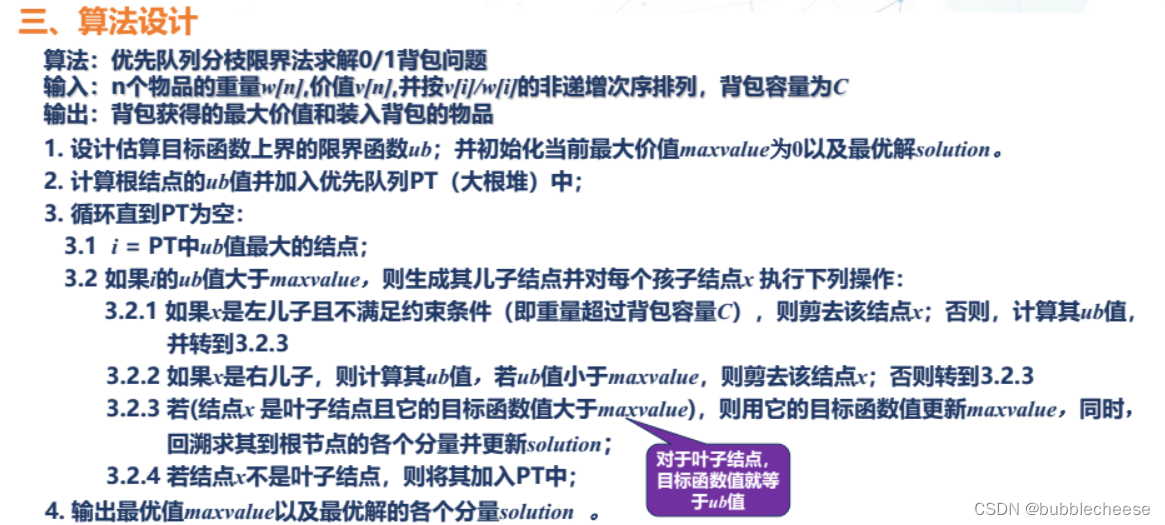
2.2 求目标函数最大值问题的算法描述

3 时空性能分析
3.1 时间性能
- 最坏情况下,时间复杂度是指数级。
- 采用限界函数,大范围剪枝,同时根据限界函数不断调整搜索方向,加快了问题的求解速度。
3.2 空间性能
- 为了得到最优解,每个扩展节点保存该节点到根的路径,或构建搜索树,因此需要额外存储空间。
- 需要维护待处理节点表HT(通常为优先队列)。
- 最坏情况下,空间复杂度是指数级。
4 应用
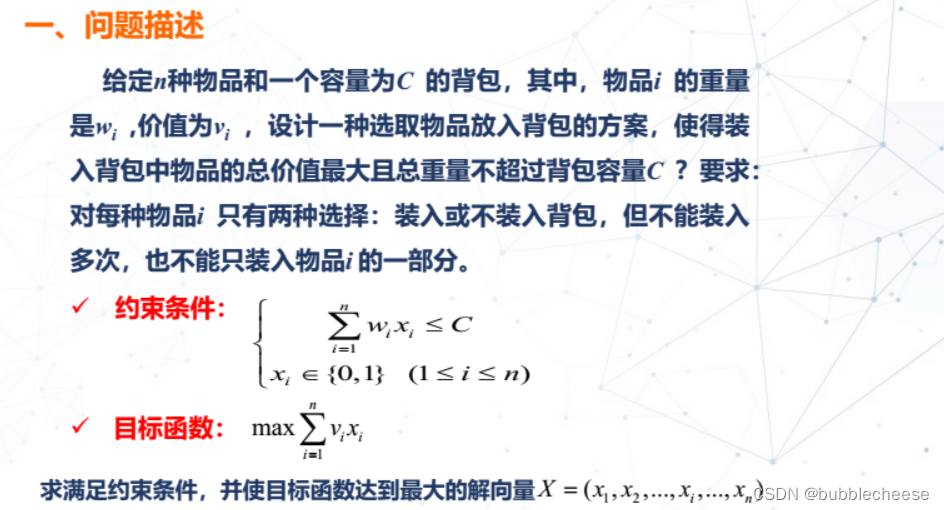
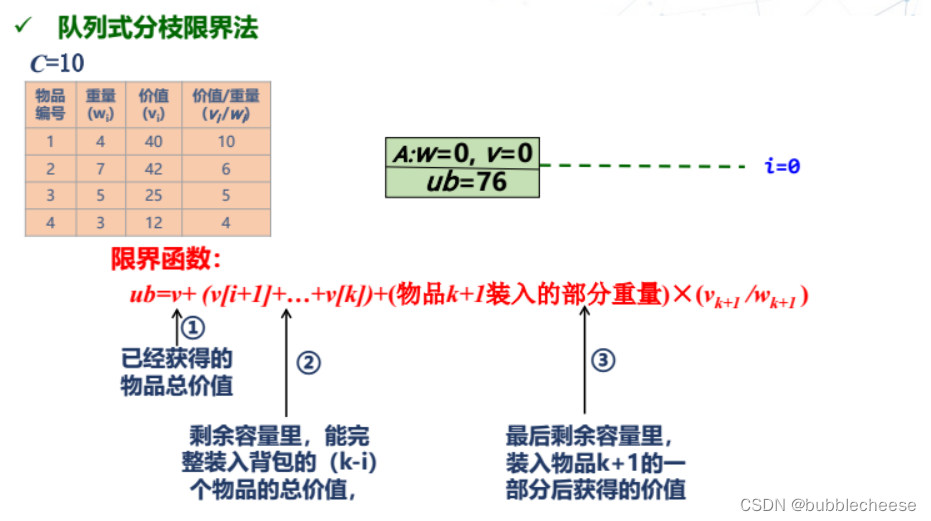
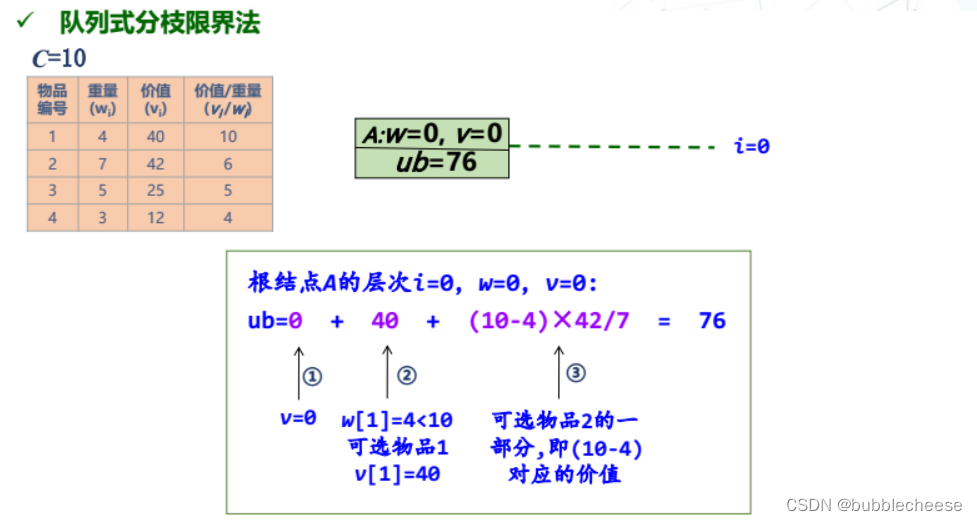
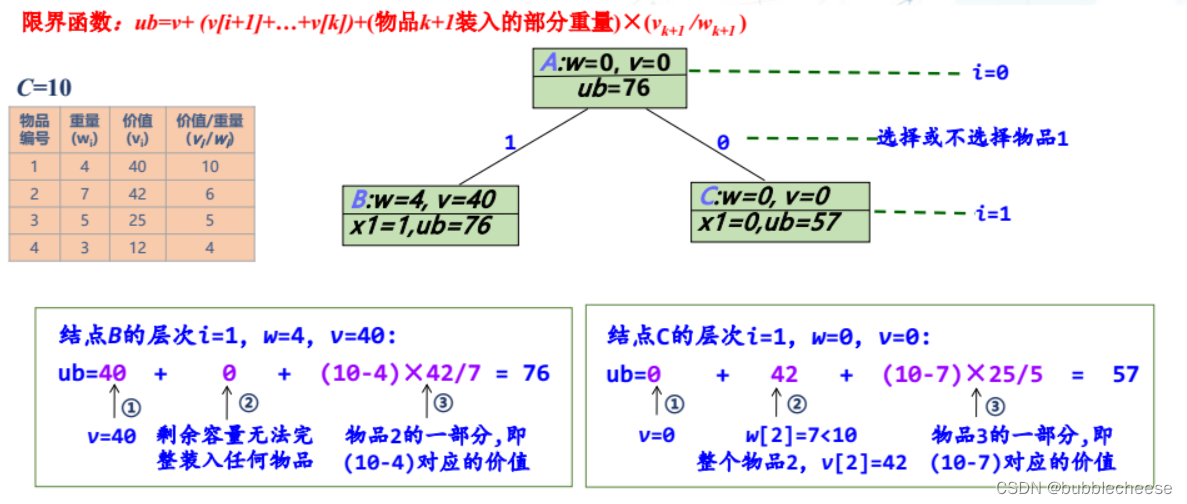
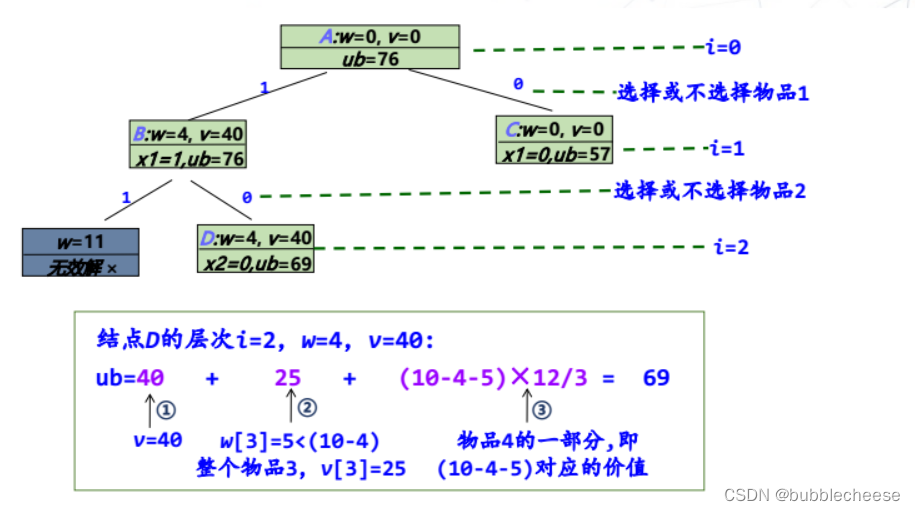
4.1 (0-1)背包问题
(内容来源于课堂课件)




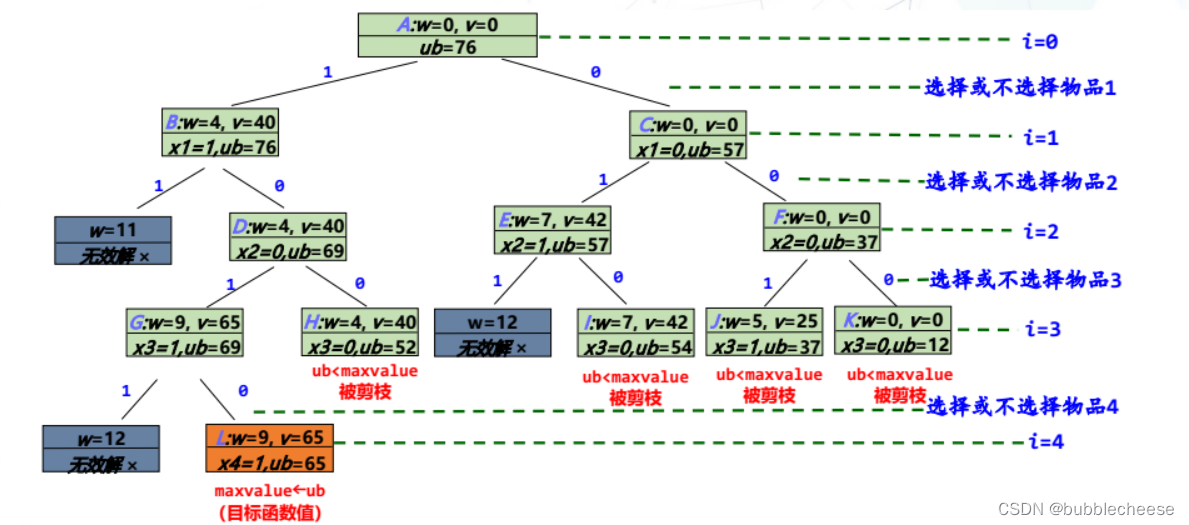
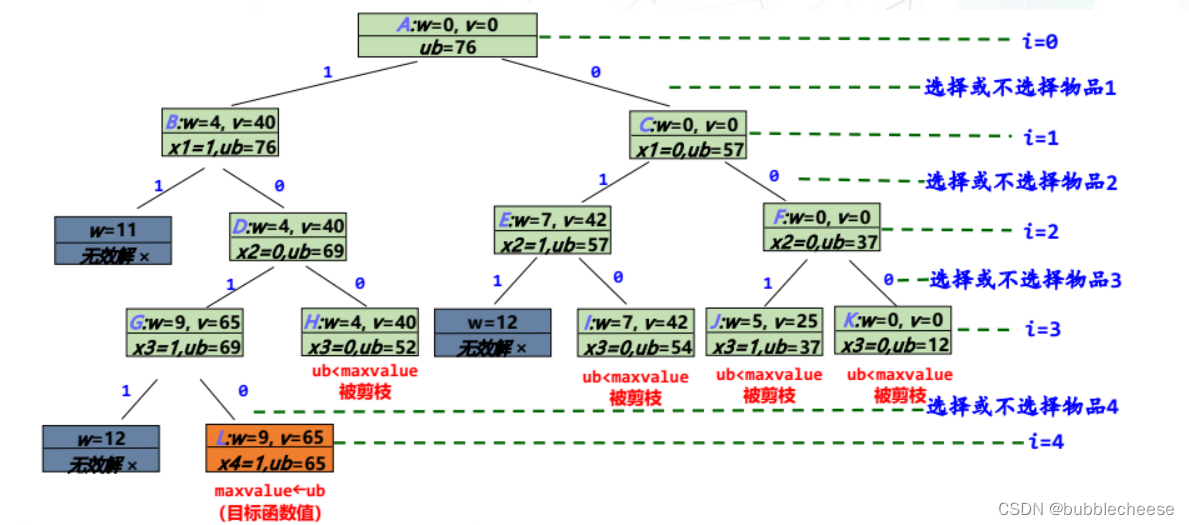
1. 队列式分枝限界法
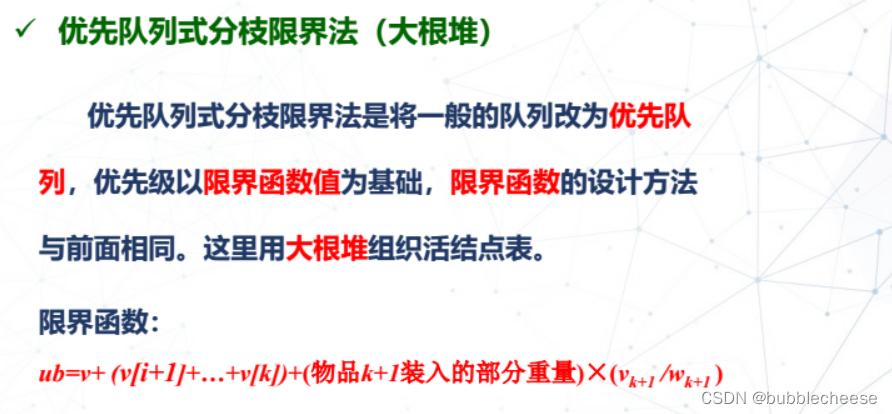
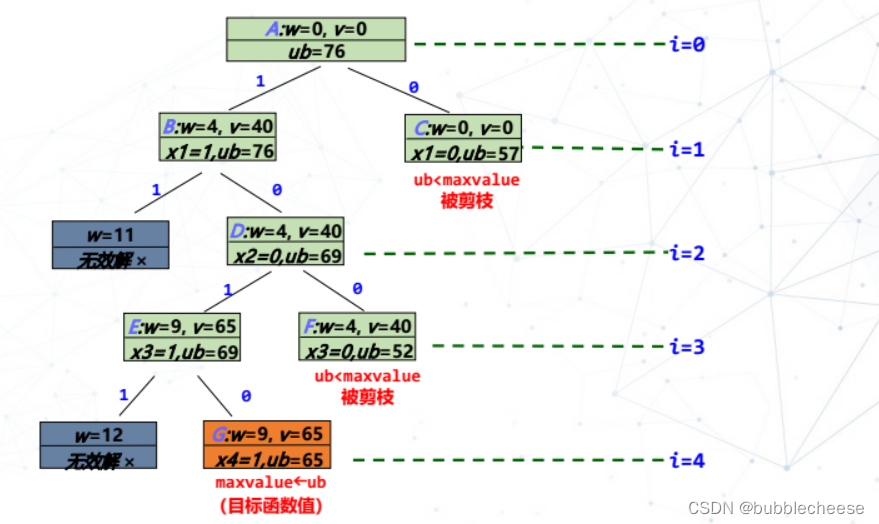
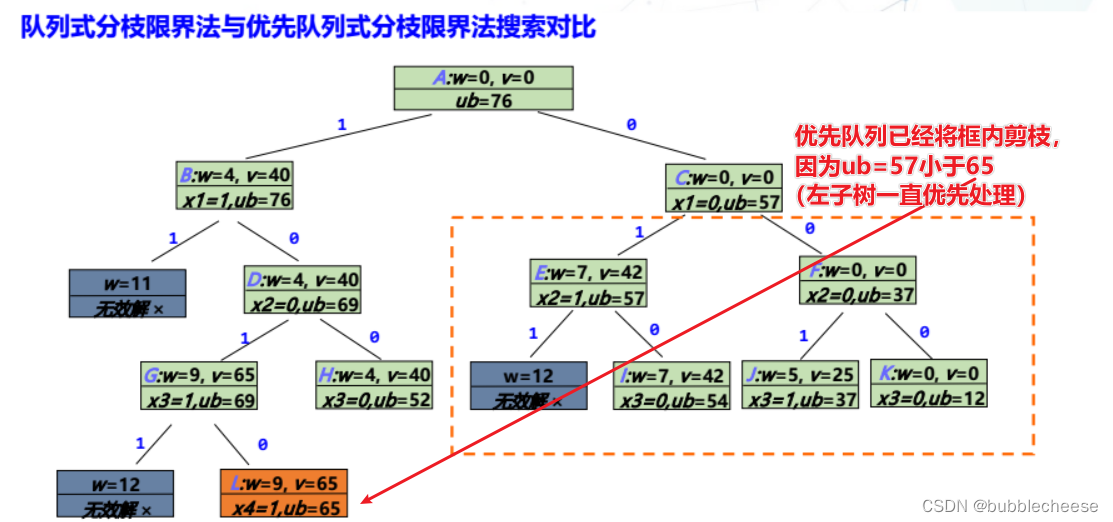
2. 优先队列式分枝限界法
3. 对比
*** 算法伪代码描述及优化 ***

4. 算法分析

4.2 迷宫问题
1.问题描述
定义一个二维数组,例如:
int maze[5][5] = {
0, 1, 0, 0, 0,
0, 1, 0, 1, 0,
0, 0, 0, 0, 0,
0, 1, 1, 1, 0,
0, 0, 0, 1, 0,
};
它表示一个迷宫,其中的1表示墙壁,0表示可以走的路,只能横着走或竖着走,不能斜着走,要求编程序找出从左上角到右下角的最短路线。输入格式:
一个5 × 5的二维数组,表示一个迷宫。数据保证有唯一最短路径。输出格式:
左上角到右下角的最短路径,格式如样例所示。输入样例:
0 1 0 0 0
0 1 0 1 0
0 0 0 0 0
0 1 1 1 0
0 0 0 1 0输出样例:
(0,0) (1,0) (2,0) (2,1) (2,2) (2,3) (2,4) (3,4) (4,4)
2.实现步骤:
(1)从入口开始,判断它的上下左右的邻边元素是否满足条件,如果满足条件就引入队列。此处用了一个 R[4][2]的二维数组,用途是可以直接在四次代码循环内,完成用父节点的x,y计算上下左右四个节点的下标,而不用多次写重复的判断代码。用循环代替了分支结构,使代码更加简洁清晰。
(2)取队首元素并将这个元素出队。寻找其相邻且未被访问的元素(用visited数组标记),满足条件的,将其进入队列并标记元素的前驱节点为队首元素。
(3)重复步骤(2),直到队列为空(没有找到可行路径)或者找到了终点。最后从终点开始,根据节点的前驱节点找出一条最短的可行路径。
其中,前驱节点使用类指针标记,最后通过终点的地址一步步往前追溯,得到完整的路径。
参考代码:
- using namespace std;
- #include <iostream>
- #include <queue>
- #include <stack>
- #define MAX 10
- int maze[MAX][MAX];
- bool visited[MAX][MAX]; //记录节点是否被访问过
-
-
- class Point {
- public:
- int x;//行
- int y;//列
- int t; //到这个点所花费的总路程
- Point* before; //指向父状态,用于逆向寻找路径
- };
- int R[4][2] = {
- -1,0,
- 1,0,
- 0,-1,
- 0,1
- };//用于状态扩展(上下左右)
-
- Point* BFS() { //返回终点状态
- queue<Point*> q;
- int x = 0, y = 0, t = 0;
- Point* start = new Point(); //函数内部定义的对象,要用new运算符分配空间
- 起点初始化
- start->x = 0;
- start->y = 0;
- start->t = 0;
- start->before = NULL;//起点没有父状态
- q.push(start); //起点入队
- while (!q.empty()) {
- Point* tmp = q.front(); //【新建指针指向队头】
- q.pop(); //取出一个节点进行扩展
- for (int i = 0; i < 4; i++) {//遍历四种状态(上下左右)
- x = tmp->x + R[i][0];
- y = tmp->y + R[i][1];
- 【skip三连!不满足条件的全部杀杀杀】
- if (x < 0 || x > 4 || y < 0 || y > 4) continue; //数组越界,跳过
- if (visited[x][y]) continue; //访问过,跳过
- if (maze[x][y] == 1) continue; //是墙,跳过
- 【可行的,新建节点并入队】
- Point* newtmp = new Point();
- newtmp->x = x;
- newtmp->y = y;
- newtmp->t = tmp->t + 1; //路程为父节点+1
- newtmp->before = tmp; //父节点为tmp
- if (x == 4 && y == 4) return newtmp;//到达终点,则返回终点节点指针
- q.push(newtmp); //新节点入队
- visited[x][y] = true;
- }
- //【结束一轮循环后,一个节点的上下左右都扩展完毕,继续检索子节点】
- }
- return start;
- }
- int main()
- {
- for (int i = 0; i < 5; i++) {
- for (int j = 0; j < 5; j++) {
- cin >> maze[i][j];
- visited[i][j] = false;
- }
- }
- Point* p = BFS();
- stack<Point*> s;
- //将节点从终点开始入栈,然后按出栈顺序输出,则可得到正序的路径
- while (p != NULL) {
- s.push(p);
- p = p->before;
- }
- while (!s.empty()) {
- Point* tmp = s.top();
- s.pop(); //得到节点信息,并出栈
- cout << "(" << tmp->x << "," << tmp->y << ")" << endl;
- }
- }

如果看完觉得这篇文章对你有帮助的话,请点个赞支持一下~

