
- 1Pandas时间序列处理
- 2蓝桥杯:十六进制转十进制(C++)_c++蓝桥杯十六进制转十进制
- 3【机器学习】进阶学习:详细解析Sklearn中的MinMaxScaler---原理、应用、源码与注意事项
- 42023年天梯赛真题谁管谁叫爹C语言_《咱俩谁管谁叫爹》是网上一首搞笑饶舌歌曲,来源于东北酒桌上的助兴游戏。现在我
- 5如何确保电子商务安全交易_以实际在线交易为例,如何做好安全电子商务
- 6mac 系统命令行查询本机 ip_mac命令行查ip
- 7uni-app (安卓、微信小程序)接口封装 token失效自动获取新的token_uniapp 微信小程序token
- 8mysql事务_读提交怎么实现
- 9【我的Android进阶之旅】Android Studio 使用 ASM Bytecode Outline 插件来研究Java字节码_toasttransformer
- 10HarmonyOS鸿蒙ArkTS/ArkUI项目,封装http网络请求,封装公共API以及调用请求的过程实现。_arkts api类
【2023.7.19】安装dreamfusion代码和环境_dmtet
赞
踩
总结:首先pytorch语法还存在不熟悉的问题,计划先1-2天补齐。目前dream-fusion代码结构主要分为如下几个部分:NeRF、Ray marching、Stable diffusion、Classifier-guidance、SDS-Loss、CLIP-measurement、Dmtet。预估各自需要2-3天的时间将代码和算法对应。
1.DMtet
隐式表达训练合适的SDF描述模型,显式表达用网格直接描述。结合了隐式表示和显式表示的优点,DMtet构建了可变形的四面体网格和一个可微的行进四面体层。可变形的四面体网格用于编码一个离散化的SDF。可微的行进四面体层将隐式表示转化为显式表示。前者使得模型能够被整体地优化。后者使得模型能够利用reconstruction loss, adversial loss生成模型的显式表达。
2.Ray marching & Ray casting & Ray tracing
Ray casting:当光线第一次击打到物体表面,光线就停止。不包含反射和折射。
ray tracing:符合物理世界中光线被反射、折射的性质。光线从相机出发到场景,在多个物体间弹射后,再停止。
path tracing:是一种避免ray tracing中部分光线重复传播的优化方法。使用蒙特卡洛方法,使每个光子随机选择,而不是不断地分割光线。
ray marching:使用sdf事先判断安全距离加速ray tracing的优化方法。
3.linux 常用 语句
Pwd: print working directory
Mkdir foldername: create new folder
Ls: print folder content
Cd foldername: go to next level
Ctrl+c: terminate the command
nvidia-smi -l check gpu usage
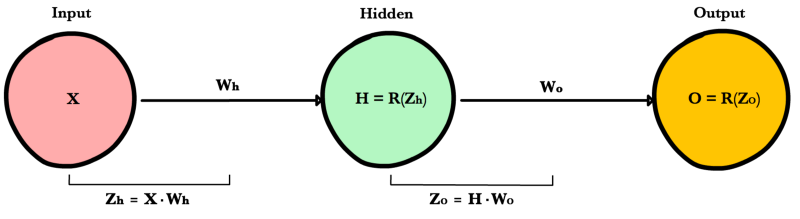
4.backprobagation
1)假设每个结点只有一个子节点
首先注意一共有至少三层函数:
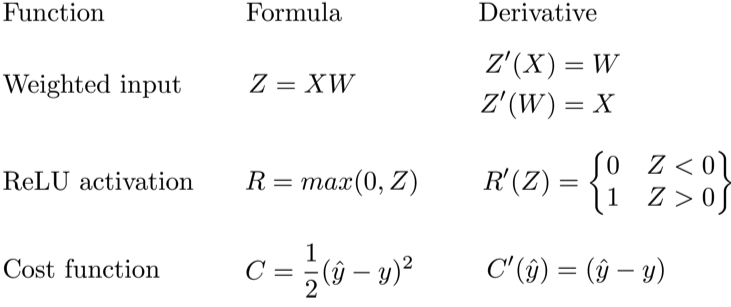
由于函数的链式法则原理,每层的梯度必然含有与上一层梯度公共的部分。
即例如C'(W1)=C'(Z1)Z1'(W1);与C‘(W0)=C'(Z1)Z1'(W0)两者共有C'(Z1)。
唯一的差别只在于Z1'(W1)=H0;Z1'(W0)=Z1'(H0)H0'(W0)=W1*R'(X) X.

所以可以构造dynamic computation graph这种东西来储存每个结点的梯度、值等用于更新。在正向传播过程时,计算图被构建,计算结点值。计算vector-Jacobian products。逆向过程时,由输出层到输入层的梯度逐渐被更新。
2)多节点情况时
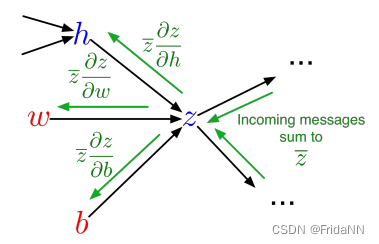
3)DCG属性
Data:结点的tensor值(tensor是一种能够有效利用GPU资源,数值计算功能类似numpy的类型)
requires_grad:如果结点该属性为真,则记录历史操作、记录后向传播图。
grad:梯度,如果requires_grad==False,则值为None.即使值为真,在其他结点a调用a.backward()时,grad值才会被更新,被更新为
is_leaf:结点为叶节点的情况如下:requires_grad==True;结点是由其他结点调用.detach()才生成;
------------------
1.signed distance function (SDF):仅用一个函数定义三维空间中的边和顶点,函数返回当前点到模型的最近点的距离。如果距离为负,则表示当前点位于模型内部。

