
热门标签
热门文章
- 1嵌入式学习之Linux基础——Shell命令_linux shell pwd
- 2百度飞桨BML平台机器学习模型部署_飞浆平台部署
- 3mysql登录报错:ERROR 1045 (28000): Access denied for user ‘root‘@‘localhost‘。配置登录时跳过权限检查,修改密码,远程授权_error 1045 (28000): access denied for user 'root'@
- 4使用AudioCraft(MusicGen)生成音乐_audiocraft是一个pytorch库,用于音频生成的深度学习研究。audiocraft包含两个
- 52024年PMP备考学习资料整合汇总!!_pmp学习资料
- 6一文详解算力_算力算法标准
- 72022重氮化工艺上岗证题目及在线模拟考试_重氮工艺证
- 8Auto.js安卓脚本自动化app的代码语句大全_autojs脚本代码大全
- 92024年,开源AI潜力更大?
- 10Groovy脚本基础全攻略_groovy脚本语法
当前位置: article > 正文
【HAL库】STM32F407----CAN通信----中断详解_can发送中断和接收中断
作者:小桥流水78 | 2024-07-14 22:23:23
赞
踩
can发送中断和接收中断
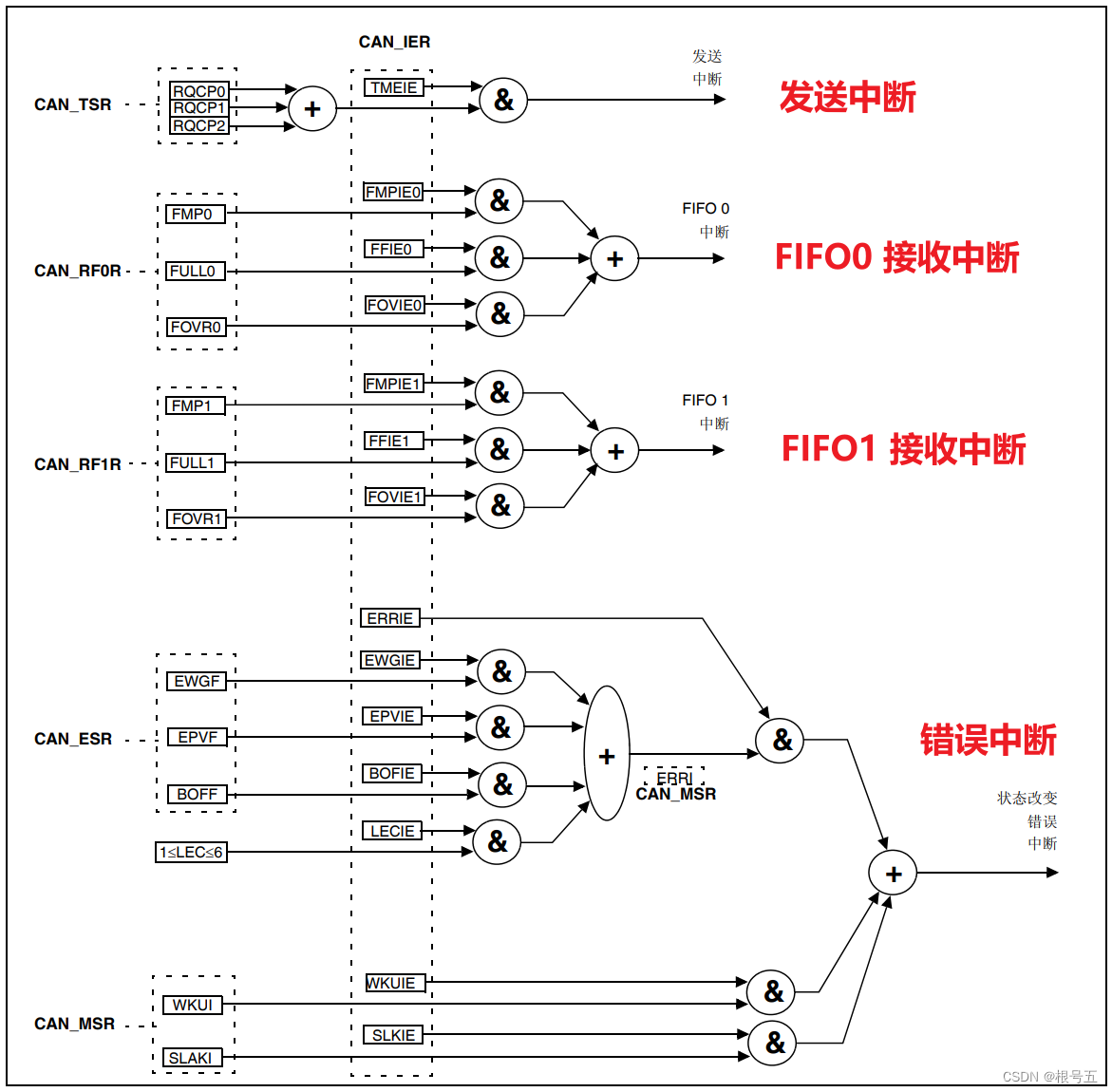
一、CAN通信----中断简介
STM32F407的CAN通信一共有四个专用中断,分别是:
- 发送中断
- FIFO0 接收中断
- FIFO1 接收中断
- 错误中断
具体如下图所示:
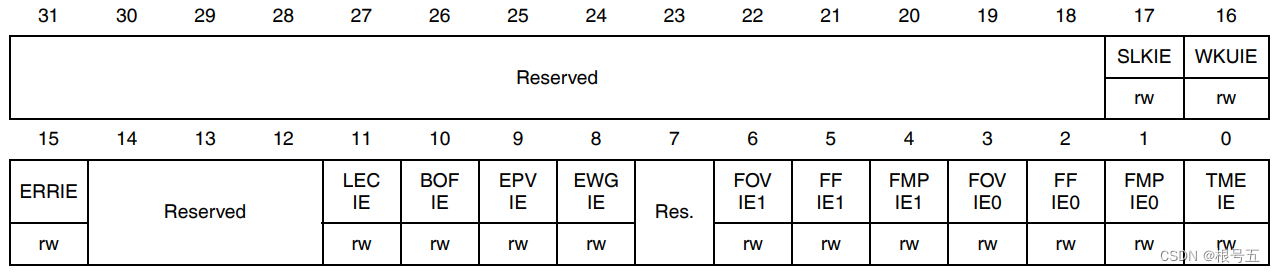
二、CAN通信----中断寄存器
CAN中断使能寄存器(CAN_IER)
偏移地址:0x14
复位值:0x000000000
| 寄存器位 | 说明 |
|---|---|
| 位31:18 | 保留位,必须保持复位值 |
| 位17 | SLKIE: 睡眠中断使能 0: 当SLAKI位被置1时,没有中断产生; 1: 当SLAKI位被置1时,产生中断。 |
| 位16 | WKUIE: 睡眠唤醒中断使能 0: 当WKUI位被置1时,没有中断产生; 1: 当WKUI位被置1时,产生中断。 |
| 位15 | ERRIE: 错误中断使能 0: 当CAN_ESR寄存器有错误挂号时,没有中断产生; 1: 当CAN_ESR寄存器有错误挂号时,产生中断。 |
| 位14:12 | 保留位,硬件强制为0。 |
| 位11 | LECIE: 上次错误号中断使能 0: 当检测到错误从而硬件对LEC[2:0]写入非0值时,不会对ERRI位置1; 1: 当检测到错误从而硬件对LEC[2:0]写入非0值时,对ERRI位置1。 |
| 位10 | BOFIE: 离线中断使能 0: 当BOFF位被置1时,不会对ERRI位置1; 1: 当BOFF位被置1时,对ERRI位置1。 |
| 位9 | EOVIE:错误被动中断使能 0: 当EPVF位被置1时,不会对ERRI位置1; 1: 当EPVF位被置1时,对ERRI位置1。 |
| 位8 | EWGIE: 错误警告中断使能 0: 当EWGF位被置1时,不会对ERRI位置1; 1: 当EWGF位被置1时,对ERRI位置1。 |
| 位7 | 保留位,硬件强制为0 |
| 位6 | FOVIE1: FIFO1溢出中断使能 0: 当FIFO1的FOVR位被置1时,没有中断产生; 1: 当FIFO1的FOVR位被置1时,产生中断。 |
| 位5 | FFIE1: FIFO1满中断使能 0: 当FIFO1的FULL位被置1时,没有中断产生; 1: 当FIFO1的FULL位被置1时,产生中断。 |
| 位4 | FMPIE1: FIFO1消息挂起中断使能 0: 当FIFO1的FMP[1:0]位被写入非0值时,没有中断产生; 1: 当FIFO1的FMP[1:0]位被写入非0值时,产生中断。 |
| 位3 | FOVIE0: FIFO0溢出中断使能 0: 当FIFO0的FOVR位被置1时,没有中断产生; 1: 当FIFO0的FOVR位被置1时,产生中断。 |
| 位2 | FFIE0: FIFO0满中断使能 0: 当FIFO0的FULL位被置1时,没有中断产生; 1: 当FIFO0的FULL位被置1时,产生中断。 |
| 位1 | FMPIE0: FIFO0消息挂起中断使能 0: 当FIFO0的FMP[1:0]位被写入非0值时,没有中断产生; 1: 当FIFO0的FMP[1:0]位被写入非0值时,产生中断。 |
| 位0 | TMEIE: 发送邮箱空中断使能 0: 当RQCPx位被置1时,没有中断产生; 1: 当RQCPx位被置1时,产生中断。 |
三、CAN通信----中断配置
1. 在STM32CubeMX上,勾选中断
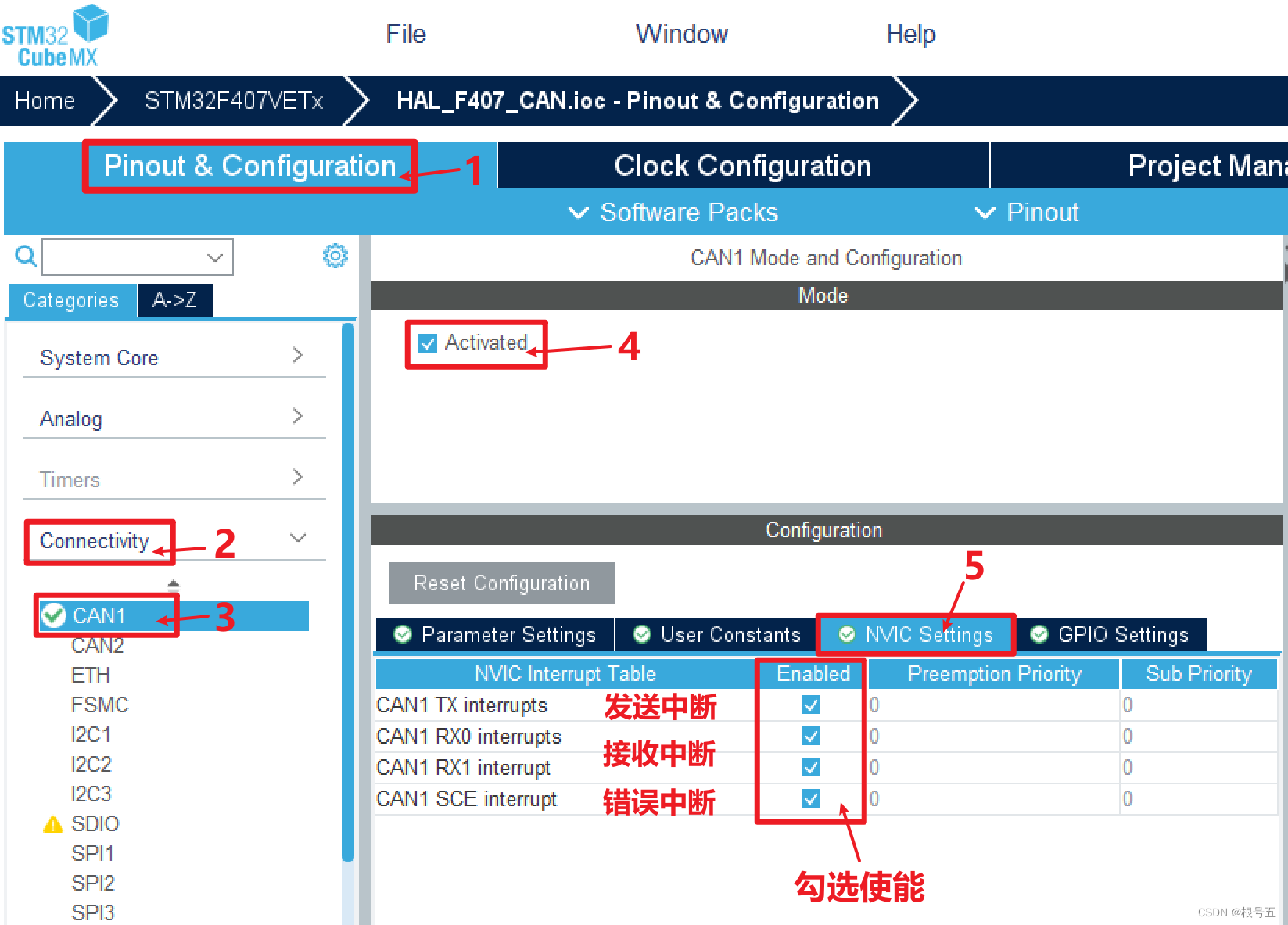
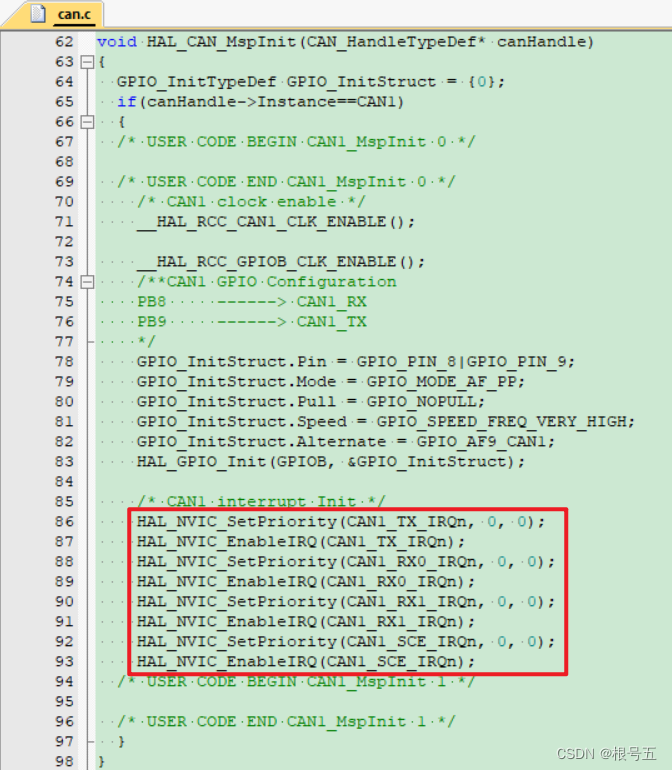
生成程序后,代码如下:
STM32CubeMX上,关于CAN通信配置的具体操作步骤,请看这篇文章:
【HAL库】STM32CubeMX开发----STM32F407----CAN通信实验
2. 启动中断
需要用中断启动函数启动中断,启动函数如下:
//启动CAN中断函数
HAL_StatusTypeDef HAL_CAN_ActivateNotification(CAN_HandleTypeDef *hcan, uint32_t ActiveITs);
//禁用CAN中断函数
HAL_StatusTypeDef HAL_CAN_DeactivateNotification(CAN_HandleTypeDef *hcan, uint32_t InactiveITs);
- 1
- 2
- 3
- 4
- 5
启动中断具体如下:
//启动CAN发送中断
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_TX_MAILBOX_EMPTY);
//启动CAN接收中断-FIFO0接收新消息
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);
//启动CAN发送中断-FIFO0接收满
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_FULL);
//启动CAN发送中断-FIFO0接收上溢
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_OVERRUN);
//启动CAN接收中断-FIFO1接收新消息
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO1_MSG_PENDING);
//启动CAN发送中断-FIFO1接收满
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO1_FULL);
//启动CAN发送中断-FIFO1接收上溢
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO1_OVERRUN);
//启动CAN-唤醒中断
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_WAKEUP);
//启动CAN-睡眠中断
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_SLEEP_ACK);
//启动CAN-错误告警中断
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_ERROR_WARNING);
//启动CAN-错误被动中断
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_ERROR_PASSIVE);
//启动CAN-总线关闭中断
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_BUSOFF);
//启动CAN-上一个错误代码中断
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_LAST_ERROR_CODE);
//启动CAN-错误中断
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_ERROR);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
3. 中断回调函数
当产生对应的中断,就会调用对应的中断回调函数。
//CAN通信-发送完成回调函数
void HAL_CAN_TxMailbox0CompleteCallback(CAN_HandleTypeDef *hcan);
void HAL_CAN_TxMailbox1CompleteCallback(CAN_HandleTypeDef *hcan);
void HAL_CAN_TxMailbox2CompleteCallback(CAN_HandleTypeDef *hcan);
//CAN通信-发送取消回调函数
void HAL_CAN_TxMailbox0AbortCallback(CAN_HandleTypeDef *hcan);
void HAL_CAN_TxMailbox1AbortCallback(CAN_HandleTypeDef *hcan);
void HAL_CAN_TxMailbox2AbortCallback(CAN_HandleTypeDef *hcan);
//CAN通信-FIFO0接收新消息回调函数
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan);
//CAN通信-FIFO0接收满回调函数
void HAL_CAN_RxFifo0FullCallback(CAN_HandleTypeDef *hcan);
//CAN通信-FIFO1接收新消息回调函数
void HAL_CAN_RxFifo1MsgPendingCallback(CAN_HandleTypeDef *hcan);
//CAN通信-FIFO1接收满回调函数
void HAL_CAN_RxFifo1FullCallback(CAN_HandleTypeDef *hcan);
//CAN通信-休眠回调函数
void HAL_CAN_SleepCallback(CAN_HandleTypeDef *hcan);
//CAN通信-唤醒回调函数
void HAL_CAN_WakeUpFromRxMsgCallback(CAN_HandleTypeDef *hcan);
//CAN通信-错误回调函数
void HAL_CAN_ErrorCallback(CAN_HandleTypeDef *hcan);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小桥流水78/article/detail/826539
推荐阅读
相关标签

