
- 1一文快速了解浏览器Sui Explorer_sui区块浏览器
- 2Elasticsearch Linux学习结合SpringBoot实操_连接linux中的elasticsearch ,编写spring boot项目
- 32024最新华为OD机试试题库全 -【机器人仓库搬砖】- C卷_华为od2024题库
- 4GEE:关于遥感生态指数(RSEI)的若干疑问_遥感生态指数主成分分析全是正的
- 5西门子S7系列中间人攻击:流量劫持和转发(一)_plc 中间人攻击
- 6华为云认证有什么?考试难不难?
- 7Verilog 代码规范_verilog代码编写规范
- 8如何将mysql的数据导出excel_教你如何将SQL数据导出到EXCEL中
- 9【大语言模型】基础:TF-IDF
- 10Xilinx MicroBlaze软核的使用-Uartlite
激光雷达标定入门(10)ROS驱动固态激光雷达(Livox Horizon)_livox ros driver
赞
踩
据Livox官网介绍,Horizon的探测距离为260米,水平视场角(HFOV)81.7°,可以覆盖10米内的4条车道,搭载5个Horizon的自动驾驶系统可以实现360°的全区域探测,而该套装成本仅为64线机械激光雷达的5%。
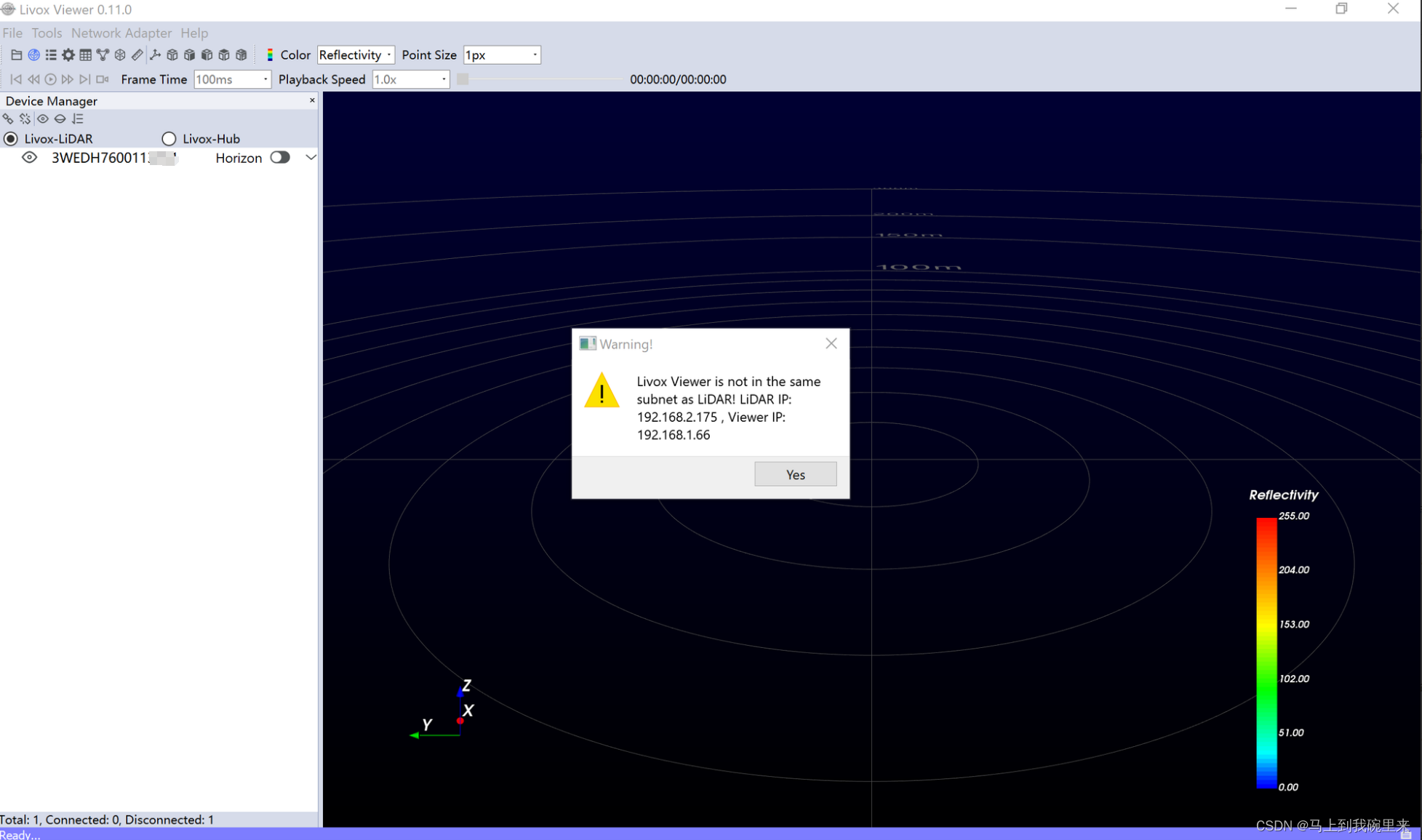
1 上位机确认IP
一定要确定IP段,因为有人改了IP段,导致一开始折腾了很久
下载Livox VIewer,官网:https://www.livoxtech.com/cn
配置完本地IP后即可显示
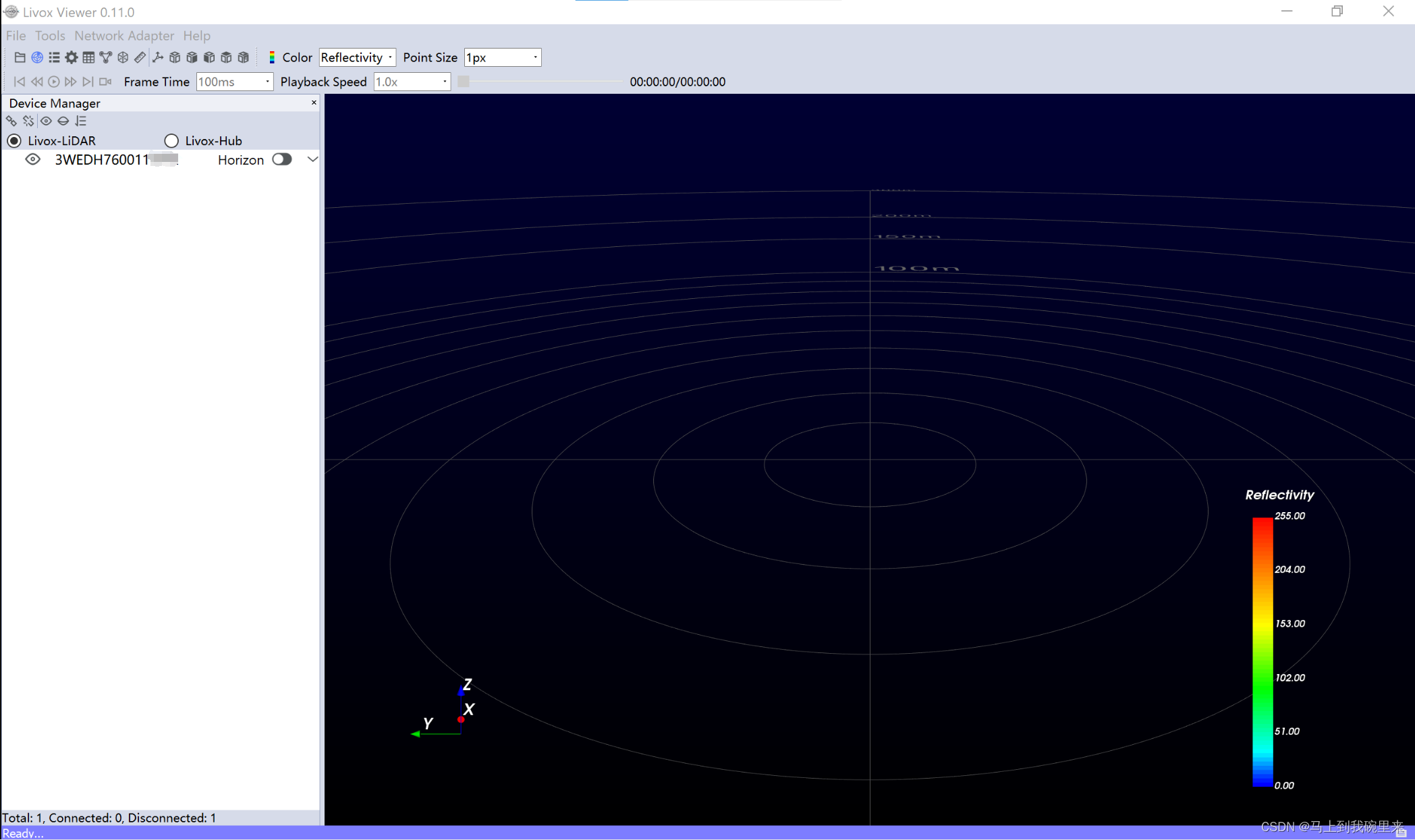
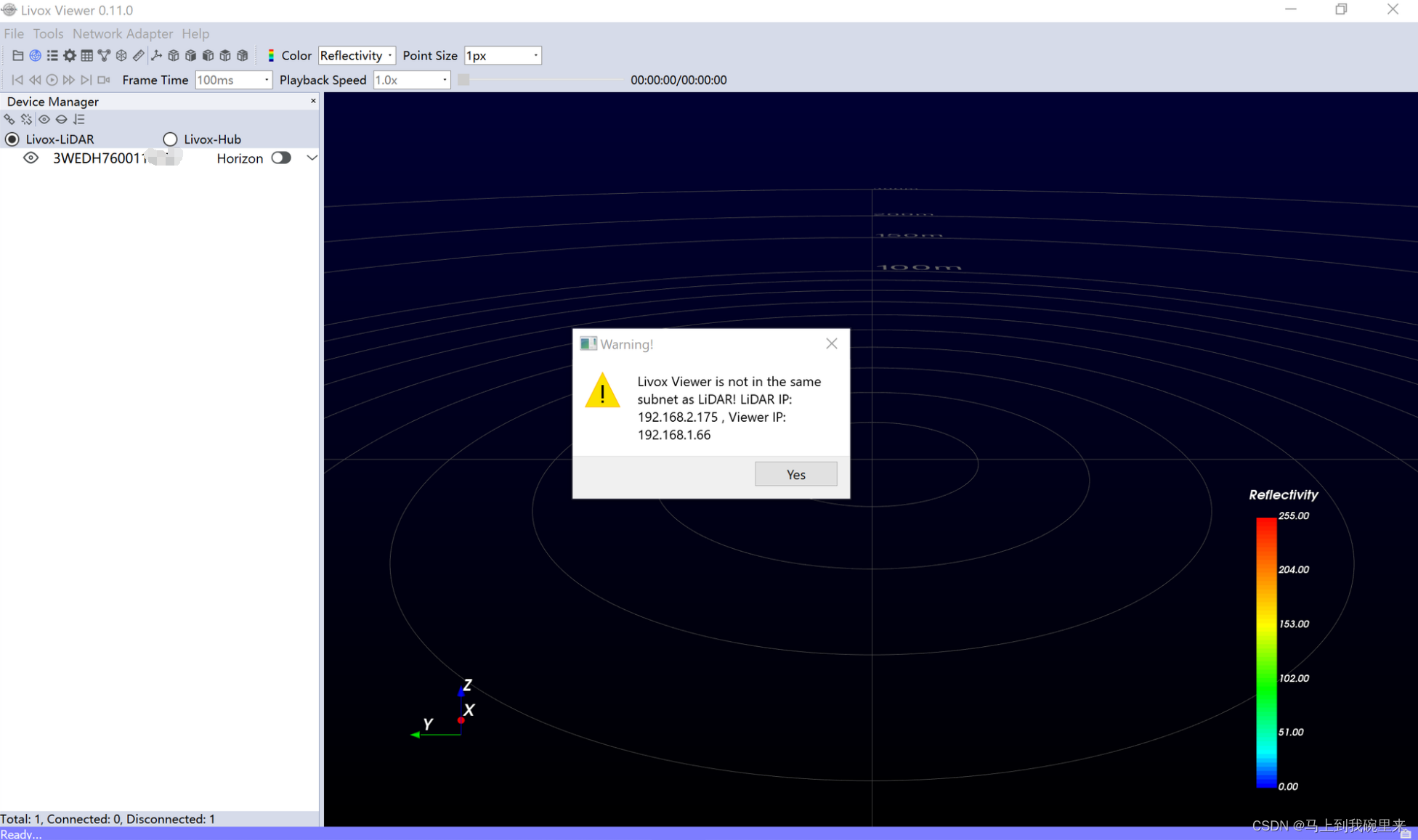
如果IP段不一致,会出现警告提示
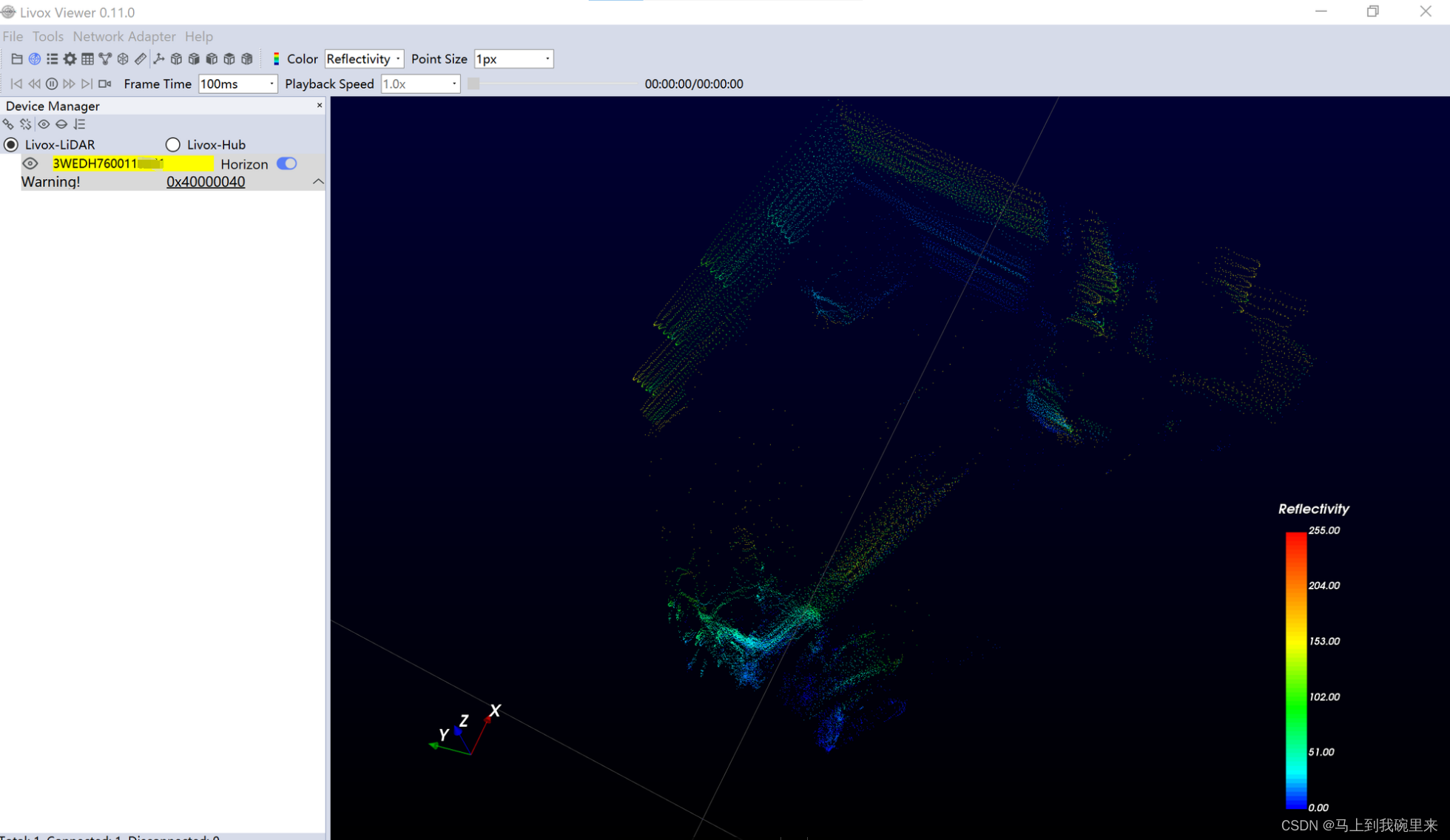
点击Play即可看到点云图
更清晰的点云图
2 安装
2.1 安装Livox-SDK(安装依赖)
运行览沃 ROS 驱动程序之前,必须安装 ROS 和 Livox-SDK。
https://github.com/Livox-SDK/Livox-SDK
简洁版
Dependencies(安装依赖)
Livox SDK requires CMake 3.0.0+ as dependencies. You can install these packages using apt:
sudo apt install cmake
- 1
Compile Livox SDK
In the Livox SDK directory, run the following commands to compile the project:
git clone https://github.com/Livox-SDK/Livox-SDK.git
cd Livox-SDK
cd build && cmake ..
make
sudo make install
- 1
- 2
- 3
- 4
- 5
2.2 安装Livox-ros-driver
https://github.com/Livox-SDK/livox_ros_driver/
简洁版实现
构建览沃 ROS 驱动程序
# 下载编译
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
cd ws_livox
catkin_make
# 更新
source ./devel/setup.sh
# 驱动
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
PS:
//方式一:启动节点并指定特定的雷达
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="3WEDH760011375"
//方式二:启动节点并指定特定的雷达
//需要在配置文件中配置一下,否则将连接周围所有的雷达
roslaunch livox_ros_driver livox_lidar_rviz.launch
rviz //启动rviz仿真器观察激光雷达
rosbag record -a //记录下的bag会以录制结束时间进行命名
- 1
- 2
- 3
- 4
- 5
- 6
- 7
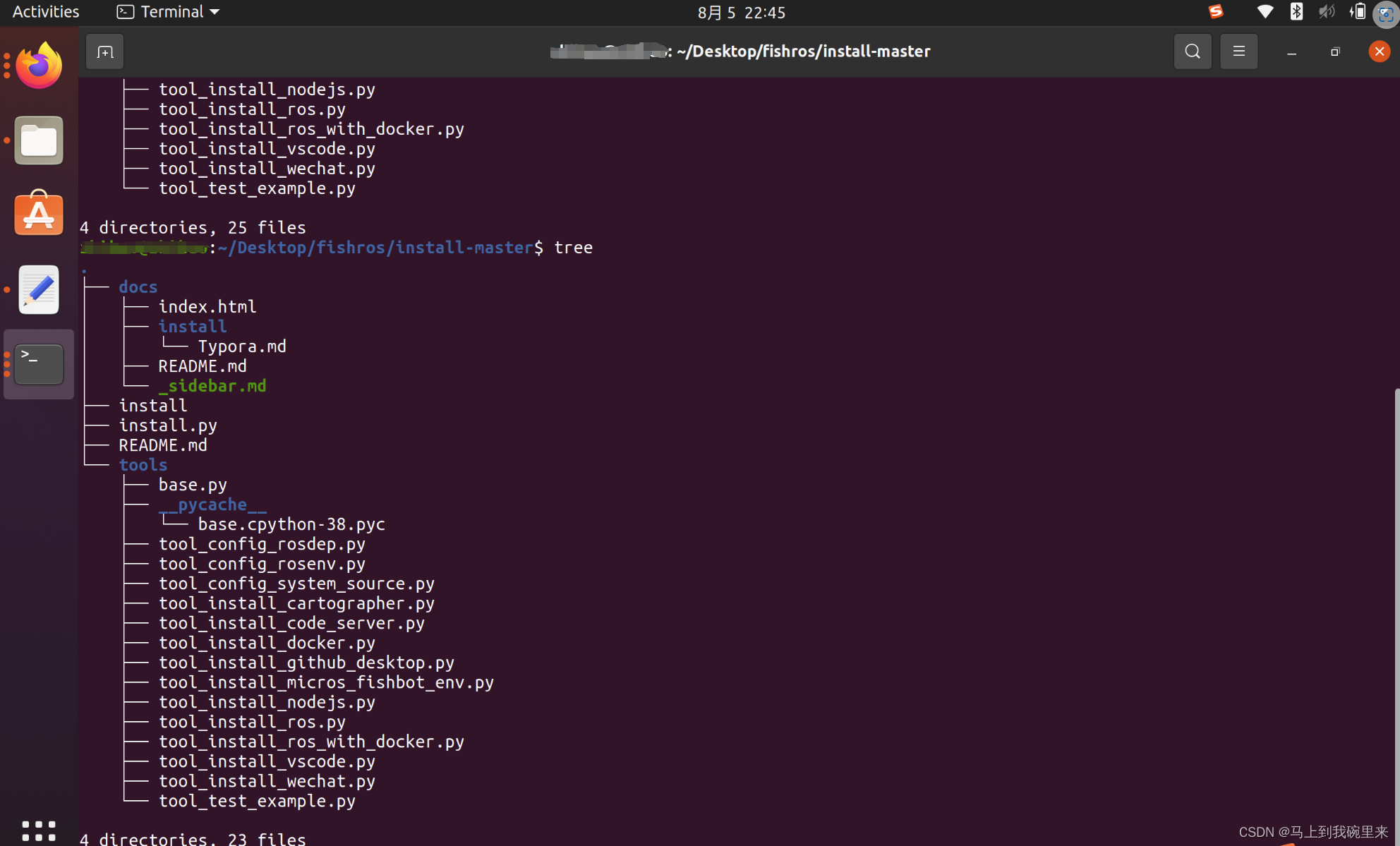
安装完可以顺便tree下工程的结构
2.3 关于广播码
另外每台览沃 LiDAR 设备拥有一个唯一的广播码。广播码由14位字符长度的序列号和一个额外的字符组成( 1、2或者 3),一共 15 位字符长。
所以有的机子上的码是不全的

在这里,正确的码应该是:3WEDH7600xxxxx1
2.4 启动
配置好IP
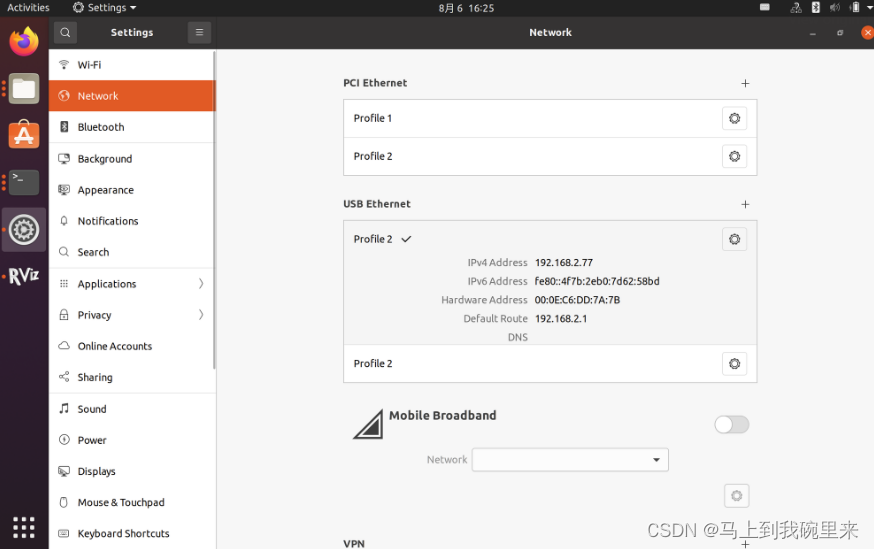
然后ifconfig一下有没有问题
可以先测试下与雷达的通讯通不通
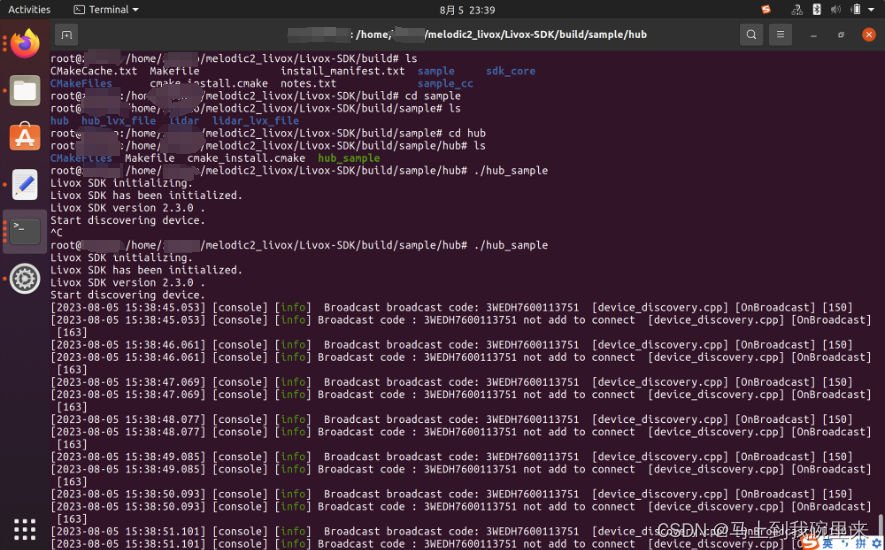
在这个路径下,运行,以上就是通讯没通的情况
正式启动:roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="3WEDH7600XXXXx"
启动失败就是下面这种没有点云图
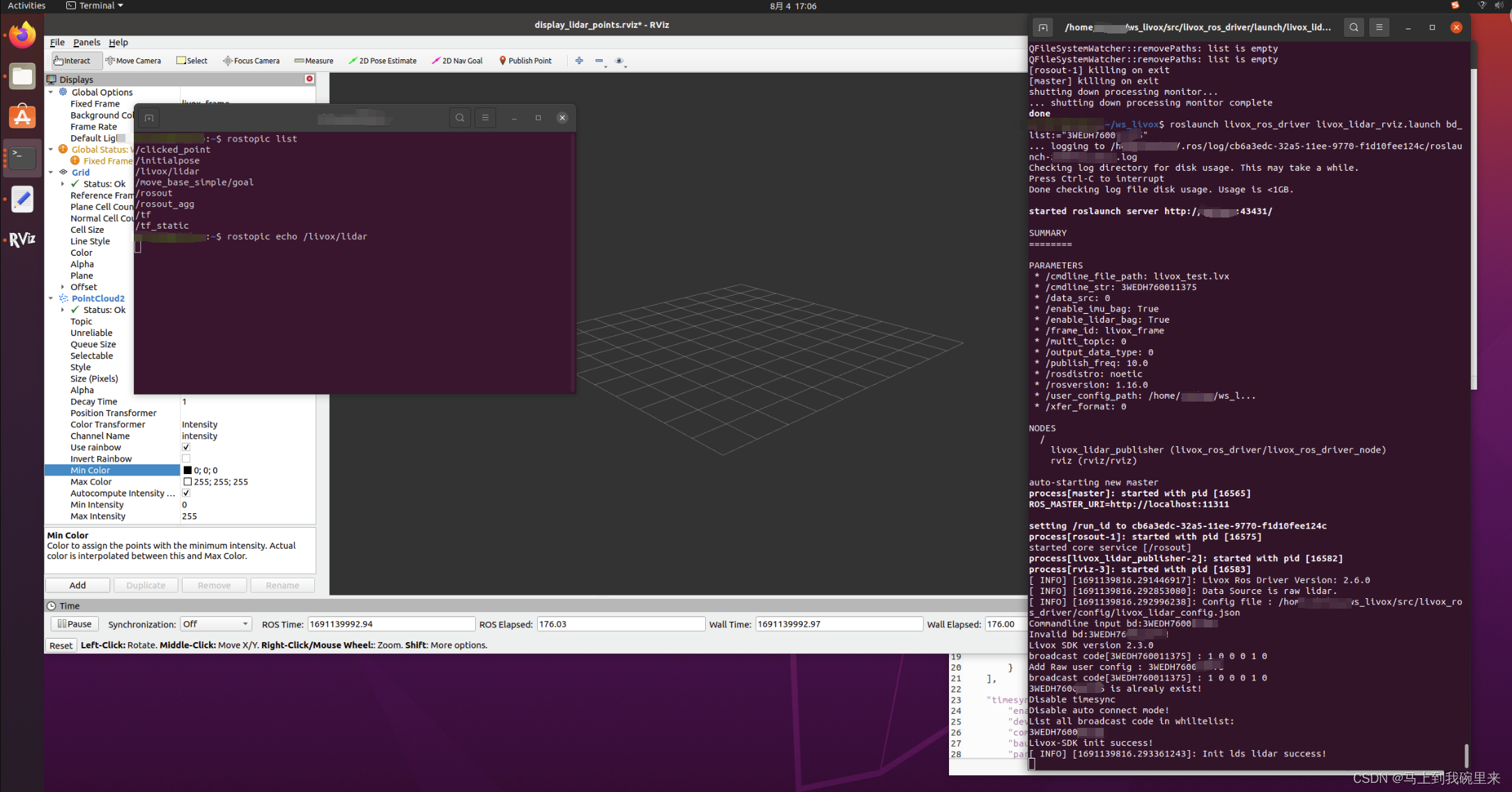
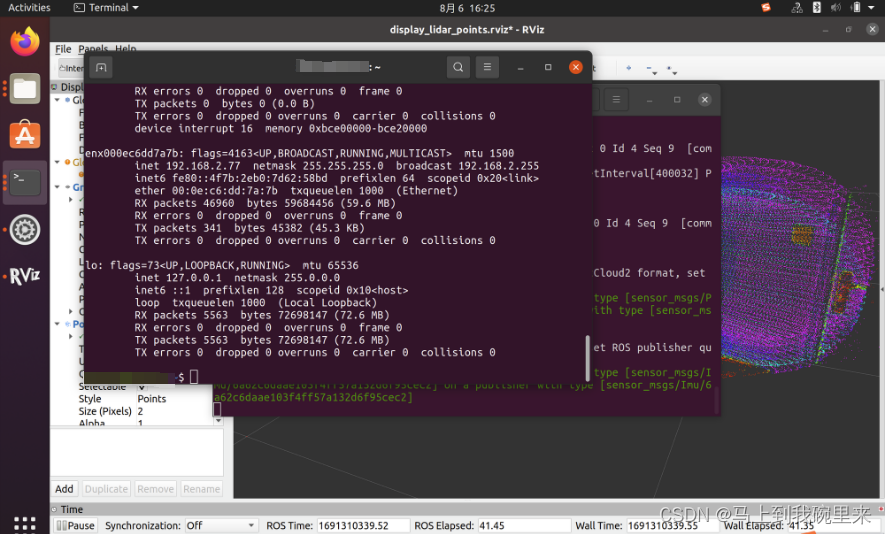
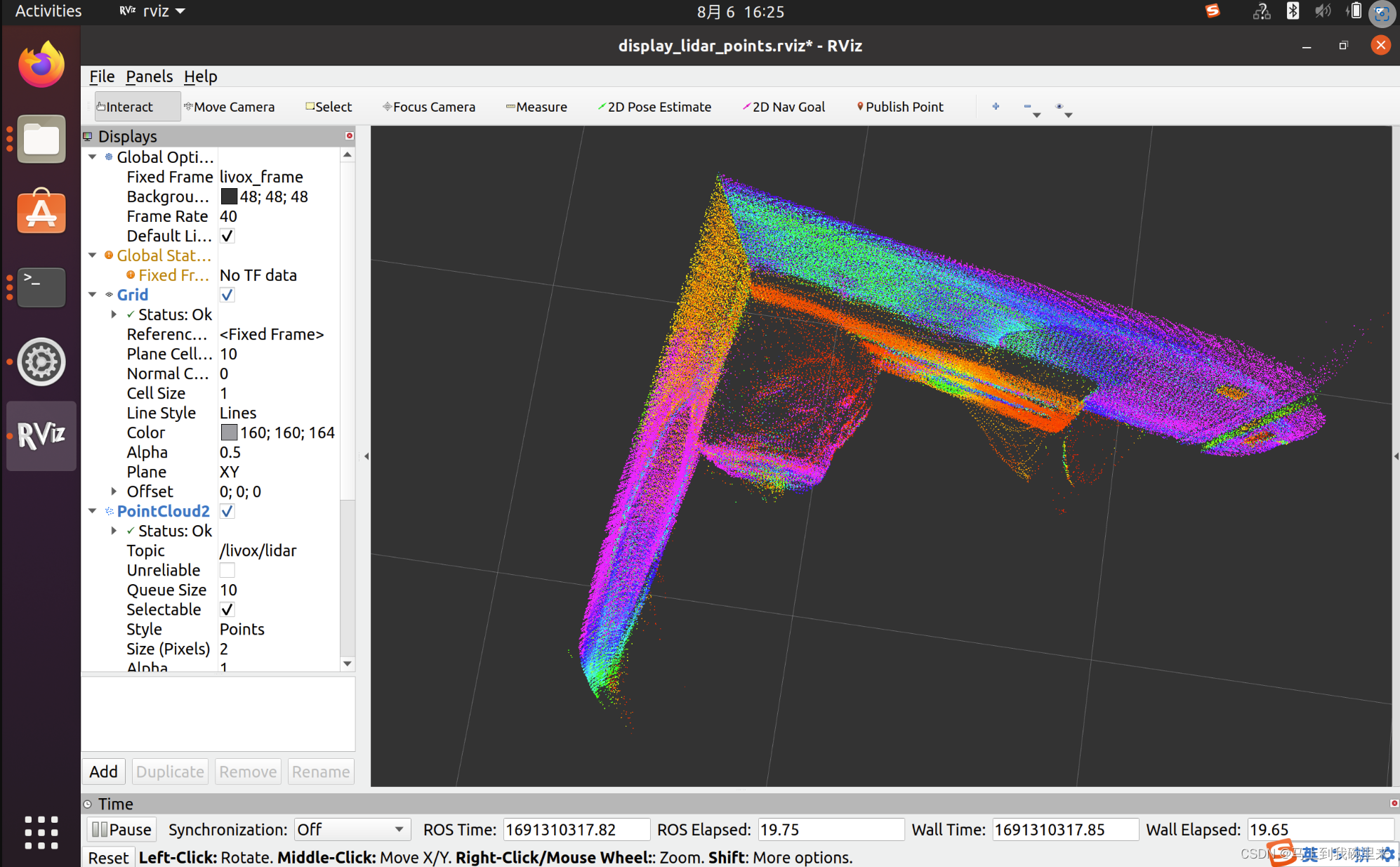
启动成功就是下面这种

RVIZ界面显示
参考
参考:激光雷达+imu_大疆览沃浩界(Livox Horizon)激光雷达测评 (rstk.cn)
参考:autoware标定工具进行固态激光雷达与相机的联合标定并运用标定结果进行投影(C++)
参考:Autoware激光雷达与网络摄像机联合标定(四) Livox Horizon Autoware驱动安装
参考:Livox Horizon 使用说明_livox horizon linux使用说明_baobei0112的博客-CSDN博客
参考:Ubuntu20.04系统安装Livox ROS Driver - MKT-porter - 博客园 (cnblogs.com)
参考:Livox Mid-70 静态/动态IP配置_livox mid70 windows修改静态ip_KAI-yq的博客-CSDN博客

