
- 1【毕业设计】Java开发环境搭建-看这篇就够了_java开发环境的搭建步骤
- 2IDEA便捷开发之生成对象所有set方法插件---GenerateAllSetter_idea 输出类的所有set
- 3postgresql数据库允许某些网段内远程访问_pg数据库设置访问连接网段区间
- 4VSCode 插件_prettier不把大写字母改成小写
- 5【Leetcode】261. Graph Valid Tree_leetcode 261
- 6C++——cmath_c++ cmath
- 7人工智能OCR领域安全应用措施_ocr技术 涉密信息流向控制
- 8深度学习(五十六)tensorflow项目构建流程_tensorflow各种框架搭建
- 9蓝桥杯_显然,这些数字串都仅包含 1, 2, 4, 6 这四个数字。 输入整数 n 和数字串 s,请你求
- 10根据身份证号码前14位计算全部有效后四位_身份证号码有前14位 如何根据性别 随机生成一个后四位,且符合身份证校验逻辑
[C++] opencv - HoughCircles(霍夫圆查找)函数介绍和使用场景
赞
踩
HoughCircles函数
HoughCircles函数用于在灰度图像中使用霍夫变换查找圆。该函数通过修改霍夫变换来实现,通常可以很好地检测出圆的中心,但可能无法找到正确的半径。可以通过指定半径范围(minRadius和maxRadius)来协助该函数,或者在#HOUGH_GRADIENT方法中将maxRadius设置为负数以仅返回圆心而不进行半径搜索,并使用其他过程找到正确的半径。此外,还可以对图像进行一定程度的平滑处理,除非它已经很软。例如,可以使用7x7内核和1.5x1.5 sigma或类似的模糊处理来平滑图像。
函数原型:
CV_EXPORTS_W void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double minDist, double param1 = 100, double param2 = 100, int minRadius = 0, int maxRadius = 0 );
参数说明:
image:输入图像,即源图像,8位单通道图像,如果使用彩色图像,需要先转换成灰度图像;
circles:用来存储HoughCircles的结果,类型为list,list中对象格式为x,y,r;
method:定义检测图像中圆的方法。目前唯一实现的方法是cv::HOUGH_GRADIENT;
dp:图像像素分辨率与参数空间分辨率的比值(官方文档上写的是图像分辨率与累加器分辨率的比值,它把参数空间认为是一个累加器,毕竟里面存储的都是经过的像素点的数量),dp=1,则参数空间与图像像素空间(分辨率)一样大,dp=2,参数空间的分辨率只有像素空间的一半大;#通过设置dp可以减少计算量
minDist:检测到的圆中心(x,y)坐标之间的最小距离。如果minDist太小,则会保留大部分圆心相近的圆。如果minDist太大,则会将圆心相近的圆进行合并(若两圆心距离 < minDist,则认为是同一个圆)。
param1:canny 边缘检测的高阈值,低阈值被自动置为高阈值的一半,默认为 100。;
param2:累加平面某点是否是圆心的判定阈值。大于该阈值才判断为圆。当值设置的很小是,检测到的圆越多。默认值为 100;
minRadius:半径的最小大小(以像素为单位)默认为 0;
maxRadius:半径的最大大小(以像素为单位)默认为 0。
使用场景
HoughCircles 是一种图像处理算法,用于检测图像中的圆。霍夫圆检测能检测出目标图像中存在的圆,但在实际使用中,参数调节存在很大的困难。
参数设置不合理会不仅导致计算量非常大,并且可能无法找不到你想保留的圆。
1)边缘噪声滤除
对图像进行 中值滤波 或者 均值滤波 或者 高斯滤波 优化,减少图像中存在的边缘噪声。
2)检测参数如何设定
通过观察原图初步确定的圆的像素半径范围(对应minRadius和maxRadius)。
b. 圆心累加值设定(对应参数param2)
因为累加圆心(圆弧上的在圆心上的累加值,累加值超过该阈值则被认为是一个圆)
c. 圆心距离设定(对应参数miniDist)
通过观察原图所有希望找出的圆,然后确定2个圆心之间最小的距离。
使用案例
- #include <iostream>
- #include <opencv2/opencv.hpp>
-
- using namespace cv;
- using namespace std;
-
- int main()
- {
- // 读取原始图像
- Mat src = imread("3480e7ce_mk_tk_a_c2_6400_4480.png", IMREAD_COLOR);
- if (src.empty())
- {
- cout << "无法读取图像" << endl;
- return -1;
- }
-
- // 转换为灰度图像
- Mat grayImage;
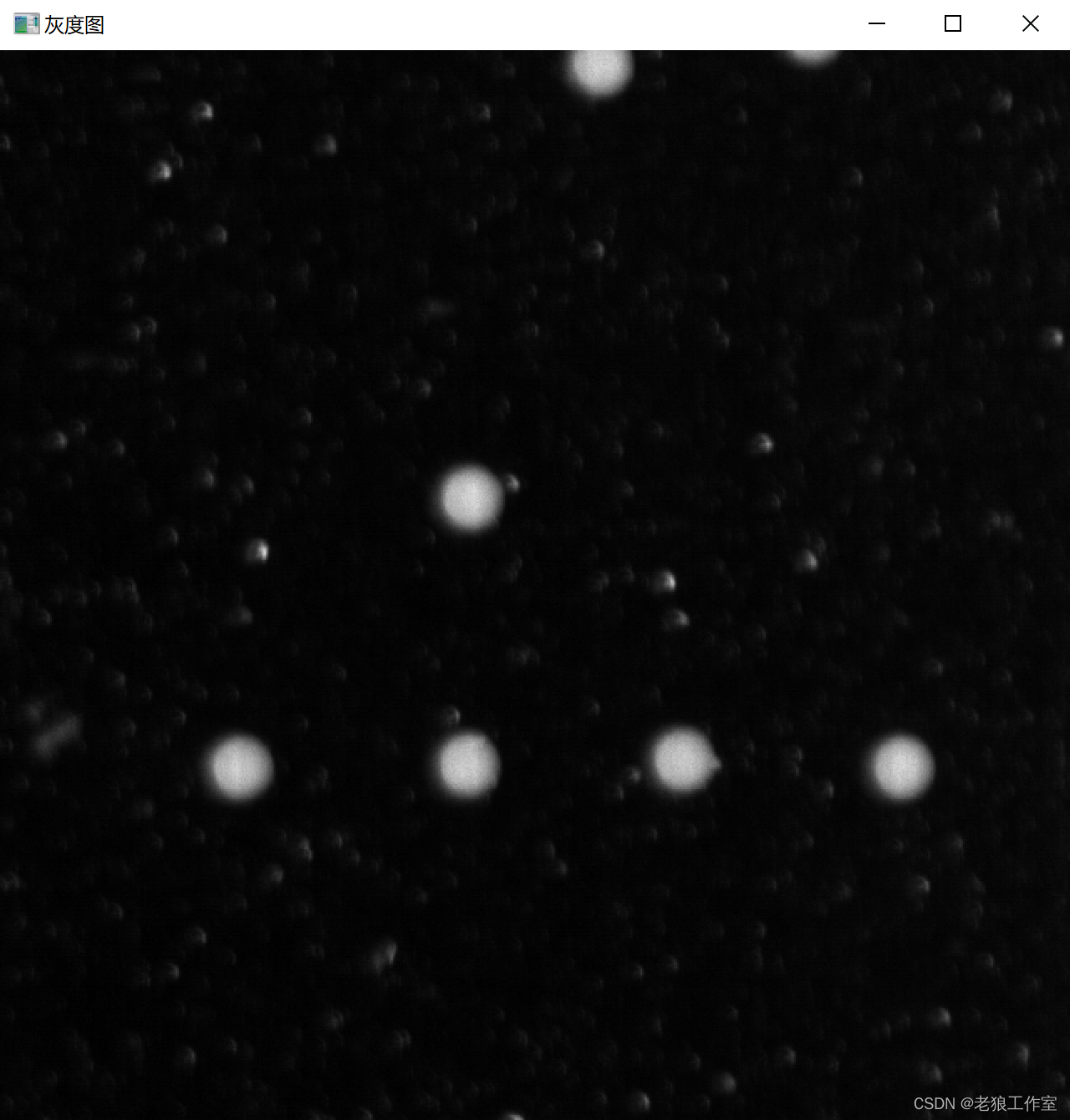
- cvtColor(src, grayImage, COLOR_BGR2GRAY);
- imshow("灰度图", grayImage);
- waitKey(0);
-
- // 使用滤波器去噪
- Mat blurImage;
- // GaussianBlur(grayImage, blurImage, Size(9, 9), 2, 2); // 高斯滤波
- // medianBlur(grayImage, blurImage, 7); // 中值滤波
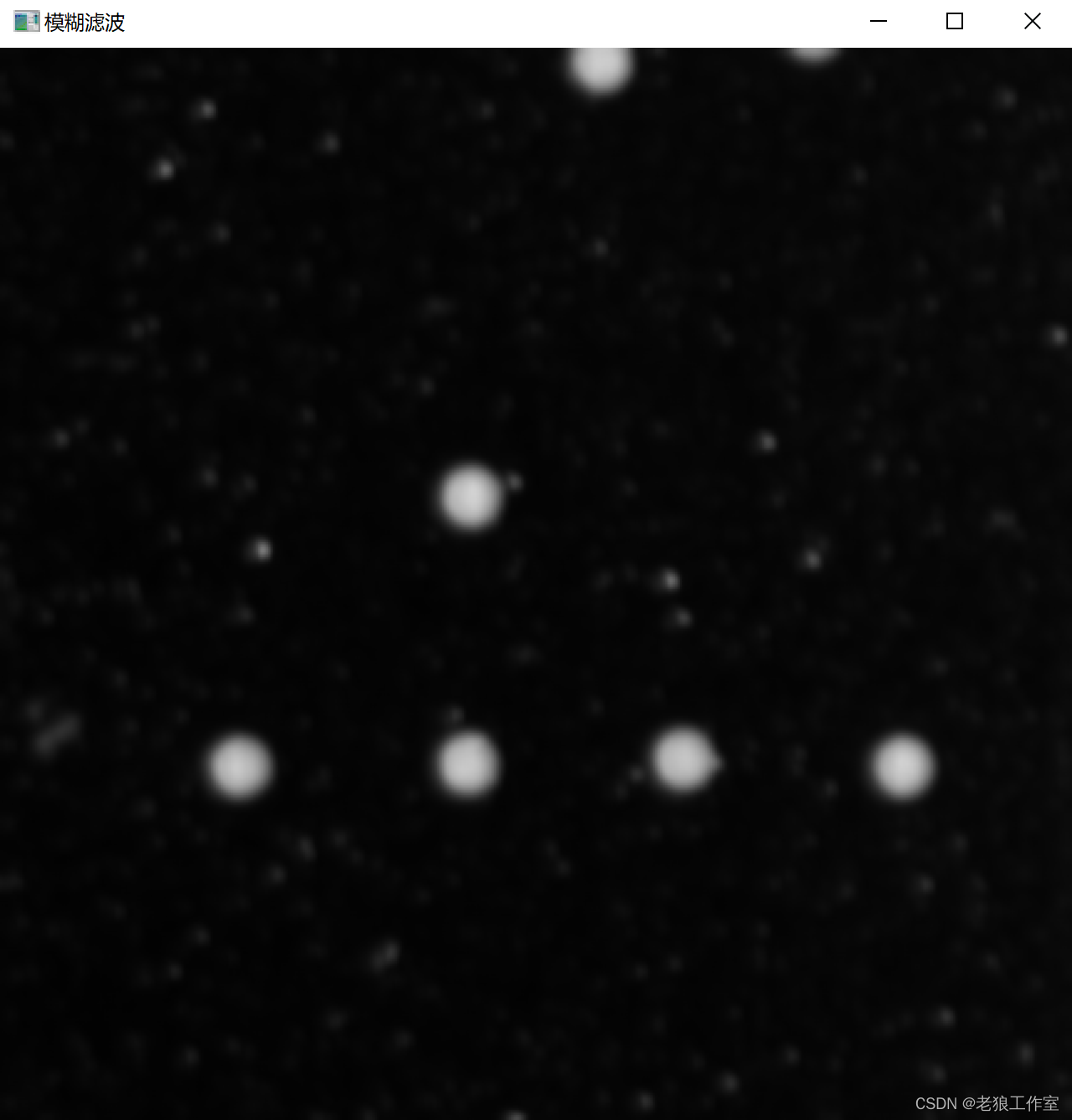
- blur(grayImage, blurImage, Size(7,7)); // 均值滤波
- imshow("模糊滤波", blurImage);
- waitKey(0);
-
- // 使用 Canny 边缘检测
- Mat edgesImage;
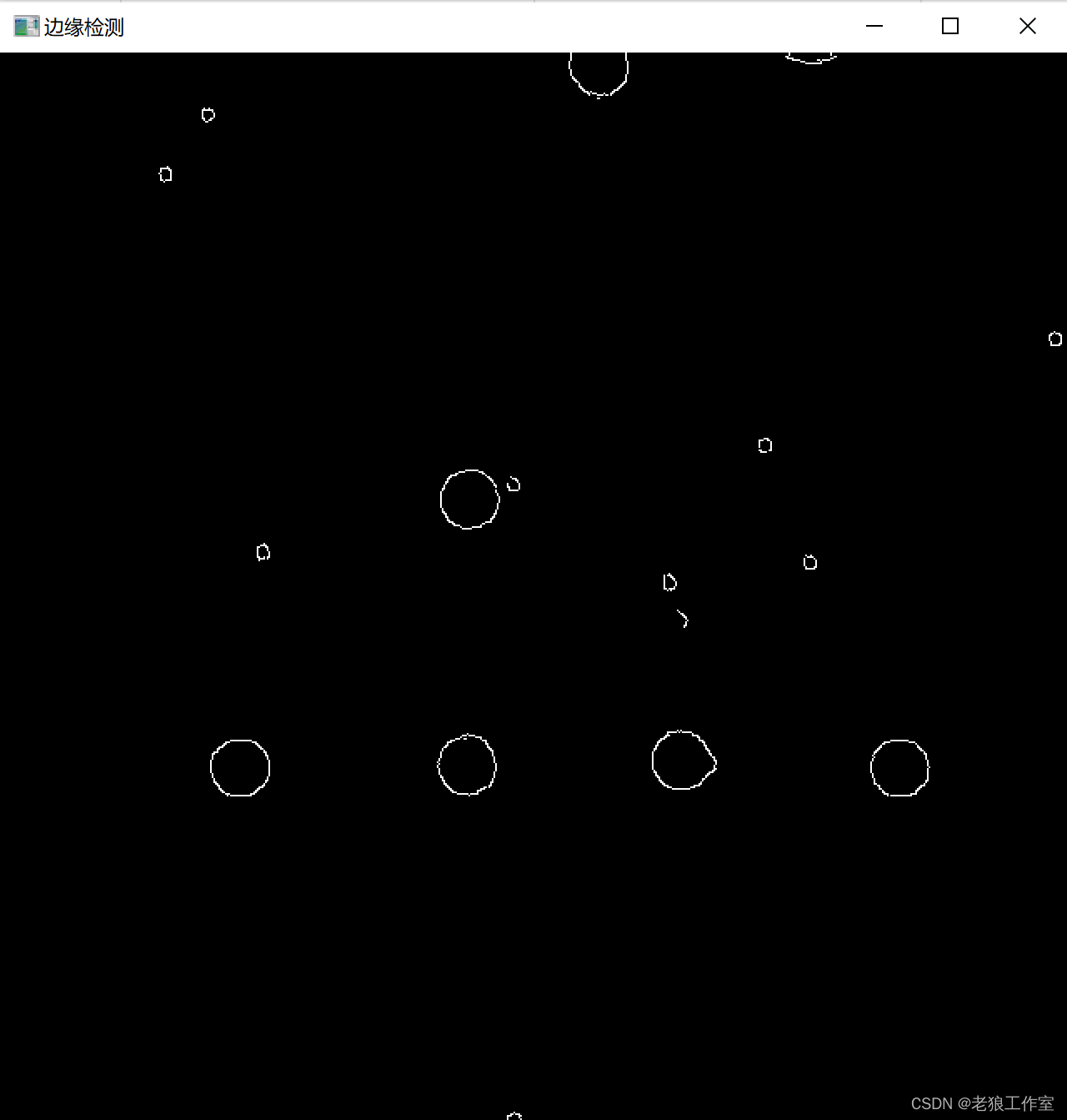
- Canny(blurImage, edgesImage, 50, 100);
- imshow("边缘检测", edgesImage);
- waitKey(0);
-
- clock_t t1 = clock();
- // 使用 HoughCircles 检测圆
- vector<Vec3f> circles;
- // 设置Hough变换参数
- int minDist = 30; // 最小距离
- int param1 = 100; // Canny边缘检测高阈值 # 保持和和前面Canny的阈值一致
- int param2 = 15; // Hough变换高阈值
- int minRadius = 10; // 最小半径
- int maxRadius = 100; // 最大半径
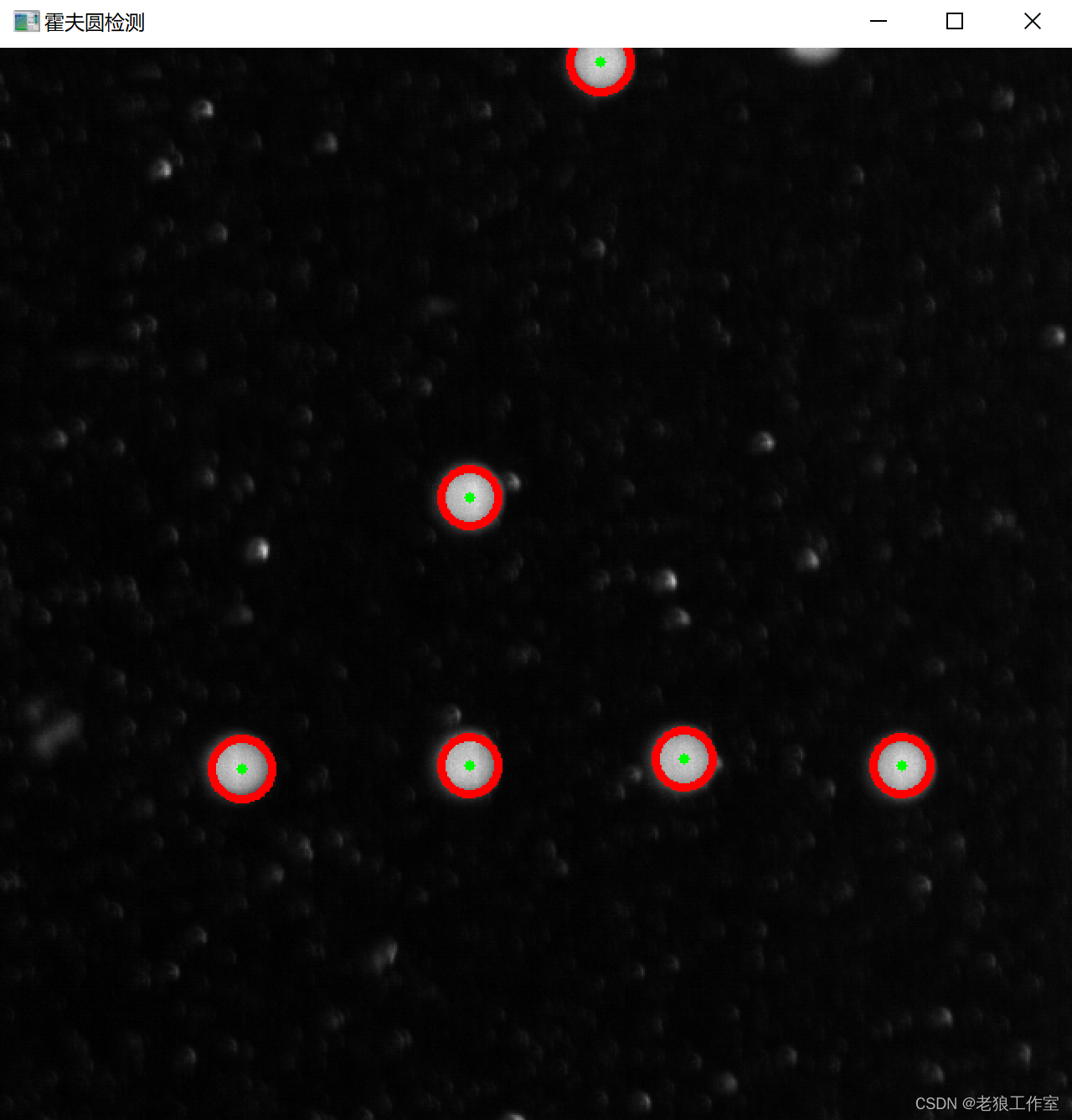
- HoughCircles(blurImage, circles, HOUGH_GRADIENT, 1, minDist, param1, param2, minRadius, maxRadius);
- clock_t t2 = clock();
- // 在原图上绘制检测到的圆
- for (size_t i = 0; i < circles.size(); i++)
- {
- Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
- int radius = cvRound(circles[i][2]);
- circle(src, center, 3, Scalar(0, 255, 0), -1, 8, 0); // 绘制圆心
- circle(src, center, radius, Scalar(0, 0, 255), 3, 8, 0); //绘制空心圆
- }
- clock_t t3 = clock();
- double timeForHoughCircle = (double) (t2 - t1) / CLOCKS_PER_SEC * 1000;
- double timeForDrawCircle = (double) (t3 - t2) / CLOCKS_PER_SEC * 1000;
- cout << "HoughCircles:" << timeForHoughCircle << "ms, DrawCircle:" << timeForDrawCircle << "ms" <<endl;
-
- // 显示结果
- imshow("霍夫圆检测", src);
- waitKey(0);
-
- return 0;
- }
灰度图:
 模糊滤波:
模糊滤波:
 边缘检测:
边缘检测:
霍夫圆检测结果:
参考资料
opencv 十一 霍夫圆检测原理及高级使用案例(含优化步骤)

