
- 1芋道源码 yudao-cloud 文档,开发指南如何看全部,破解_芋道商城文档
- 2git 常用命令大全(附命令注释)_git命令大全,大数据开发外包是如何转正华为的_git常用命令
- 3[油管搬运]PX4基础开发教程_px4飞控开发教程
- 4【算法】前缀和——二维前缀和模板题
- 5华为OD机试Python - 螺旋数字矩阵_疫情期间,小明隔离在家,百无聊赖,在纸上写数字玩。他发明了一种写法
- 6python用selenium打开浏览器后秒关闭浏览器的解决办法_selenium和python打开后立马就关闭了
- 7Github Actions 推送代码构建 Docker 镜像并 push 到仓库_github action docker推送
- 8联想小新笔记本外接显示屏HDMI无信号_联想小新hmdd接口的设备不显示
- 9[大数据]二、Hadoop-HDFS
- 10论文导读 | 复杂知识库问答综述:方法,挑战和解决方案_compositional generalization
路径规划人工势场法与改进方法的MATLAB代码实现
赞
踩
路径规划人工势场法以及改进人工势场法matlab代码,包含了
ID:2429640884746387
yjjyzzZ
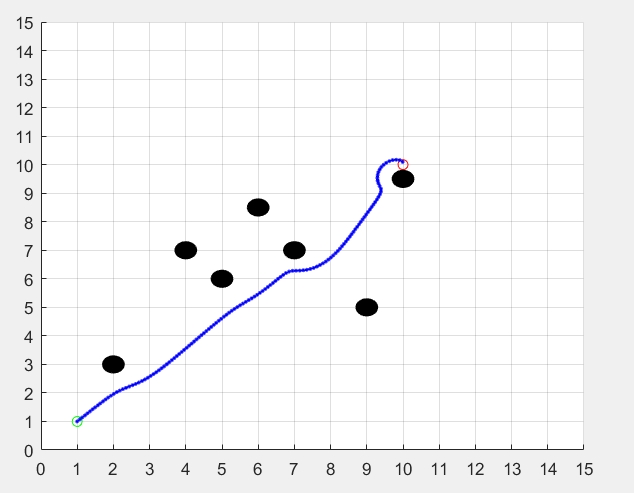
路径规划是机器人领域中的重要研究方向,通过找到机器人从起点到终点的最优路径,可以使机器人能够快速、高效地完成任务。在路径规划算法中,人工势场法是一种常见且有效的方法。本文将基于人工势场法及其改进版本,通过Matlab代码实现路径规划的功能。
-
引言
1.1 背景介绍
随着机器人技术的不断发展,路径规划成为机器人领域中的重要研究方向。路径规划是指在给定起点和终点的情况下,找到机器人行动的最佳路径。通过路径规划,可以使机器人能够快速、高效地完成任务。
1.2 目的和意义
本文旨在介绍人工势场法及其改进版本在路径规划中的应用,并通过Matlab代码实现该算法,以便读者可以直观地了解和尝试该算法。 -
人工势场法原理及流程
2.1 人工势场法原理
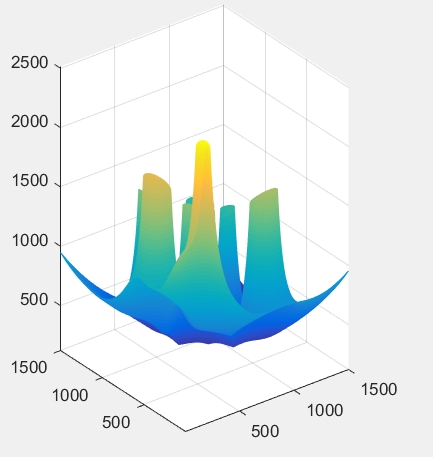
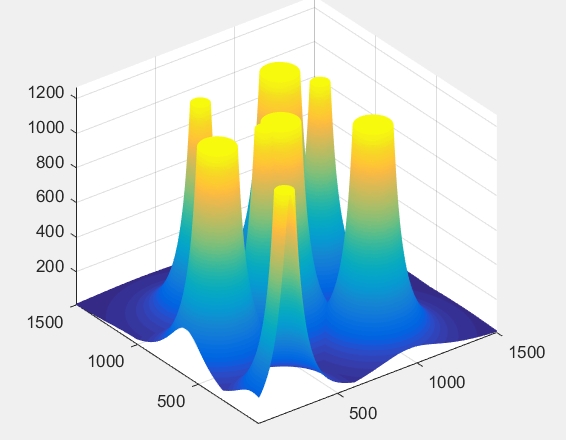
人工势场法是一种基于势场概念的路径规划方法。其核心思想是将机器人视为一个物理粒子,环境中的障碍物看作带电荷的物体,通过在环境中引入合适的势场,使机器人能够避开障碍物并找到最优路径。
2.2 人工势场法流程
1) 初始化势场:设置起点和终点的势能值,将障碍物的势能值设为无穷大。
2) 计算势能场:根据机器人与障碍物之间的距离和角度计算势能值。
3) 计算合力:将机器人所受合力拆解为水平方向和垂直方向的合力。
4) 更新机器人位置:根据合力调整机器人的位置。
5) 判断是否到达终点:如果机器人达到终点,则路径规划完成;否则返回步骤2继续计算。 -
人工势场法的问题及改进
3.1 局部最小问题
人工势场法存在局部最小问题,即机器人可能会陷入局部最小值的势能场中无法找到最优路径。
3.2 改进方法
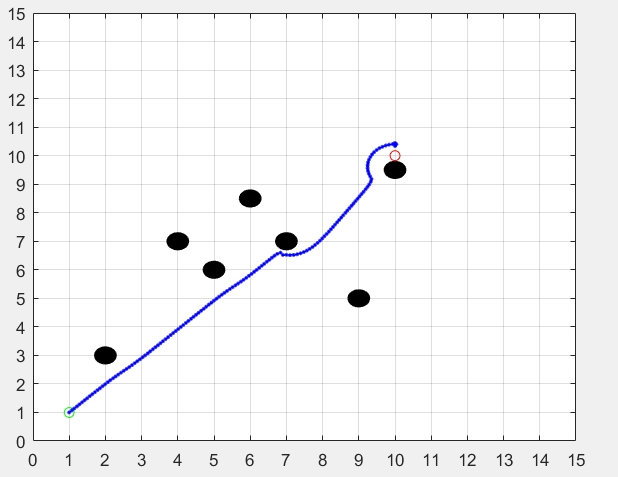
为了解决局部最小问题,研究者们提出了许多改进方法,如引入随机扰动、使用局部搜索等。这些改进方法可以有效提高人工势场法的全局搜索能力并避免陷入局部最小值。 -
Matlab代码实现
4
以上相关代码,程序地址:http://coupd.cn/640884746387.html

