
热门标签
热门文章
- 1Python+Appium+百度sdk(三)--语音识别控制_open api characters limit reached
- 2Towards Geolocation of Millions of IP Addresses(2012年)
- 3Jenkins环境配置篇-更换插件源_jenkins更新插件源
- 4电商技术揭秘22:智能仓储与物流优化(上)
- 5docker容器1:docker安装及管理_dockers 19.03安装
- 6【学习笔记】:Ubuntu 22 使用模型量化工具llama.cpp部署大模型 CPU+GPU_ubuntu上运行llama模型
- 7Mac系统HomeBrew安装过程
- 8在英特尔做了一年 AI 研发,真的很香_intel公司怎么样
- 9FC-SAN存储技术_fc san
- 10订单插旗,淘宝官方商品、交易、订单、物流、插旗接口接入
当前位置: article > 正文
机器人控制算法——两轮差速驱动运动模型_基于imm算法的双轮差速驱动机器人的定位算法
作者:2023面试高手 | 2024-04-21 22:23:37
赞
踩
基于imm算法的双轮差速驱动机器人的定位算法
1.Introduction
本文主要介绍针对于两轮差速模型的逆运动学数学推导。因为在机器人控制领域,决策规划控制层给执行器输出的控制指令v(车辆前进速度)和w(角速度),因此,我们比较关心,当底层两个驱动电机接收到此信息,如何将v和w转换成左轮速度V1和右轮速度V2。
2.Algorithm
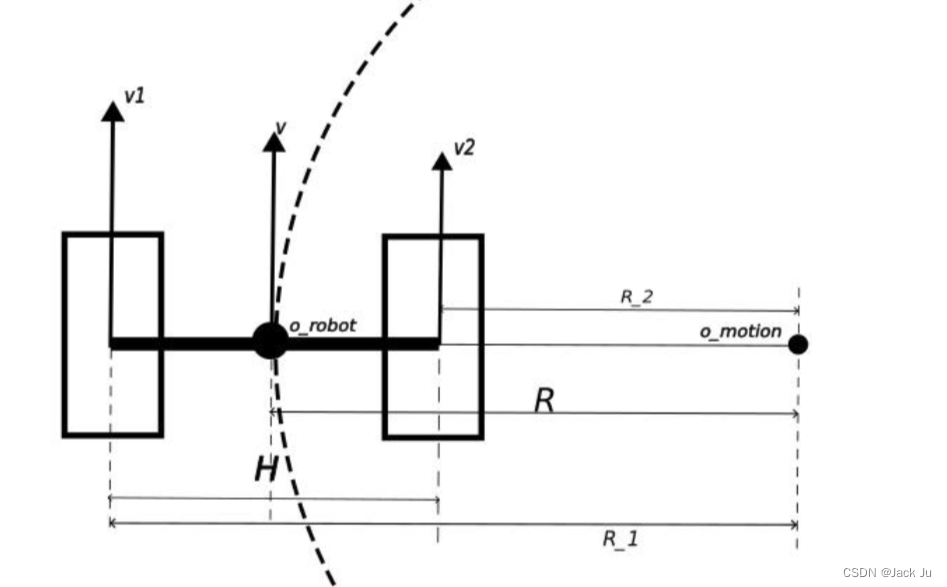
如上图,是两轮差速模型,我们考虑左轮V1!= V2,的情况。
当机器人绕远处O_mation圆心,做圆周运动机器人作圆弧运动,此时有:

我们根据上述公式,给出两轮差速模型的逆运动学数学推导,将v和w转换成左轮速度V1和右轮速度V2。
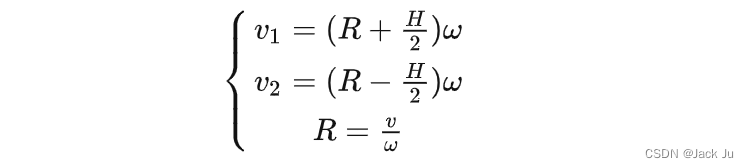
需要指出的是,此公式也包含了曲率信息,曲率C = 1/R,此曲率值,可以用于大曲率路径的前馈补偿。
至此,我们给出了两轮差速模型的逆运动学数学推导,即如何将v和w转换成左轮速度V1和右轮速度V2。
3.Reference
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/465406
推荐阅读
相关标签

