
热门标签
热门文章
- 1基于Springboot+Vue实现的宿舍管理系统
- 2kettle实现拉链表_kettle 拉链表
- 3asp.net excel文件导出的七种方法(简述)_asp.net excel文件流导出
- 4管道符的工作原理_linux管道符原理
- 5HarmonyOS学习第二章:初识ArkTs/ArkUI,常用组件
- 6OpenStack部署(1)_控制节点和计算节点配置需要一样么
- 7Android项目混淆配置_# uncomment this to preserve the line number infor
- 8基于 Spring Boot 的小区物业综合服务系统的设计与实现_基于springboot的小区服务平台
- 9HBuilder h5+app 项目 安卓本地打包,集成个推推送_h5打包app 推送消息
- 10uniapp兼容问题一些经常出现的问题_低版本安卓系统与uni-app的兼容性
当前位置: article > 正文
Linux下使用open3d进行点云可视化(.bin文件)
作者:2023面试高手 | 2024-03-14 11:03:20
赞
踩
Linux下使用open3d进行点云可视化(.bin文件)
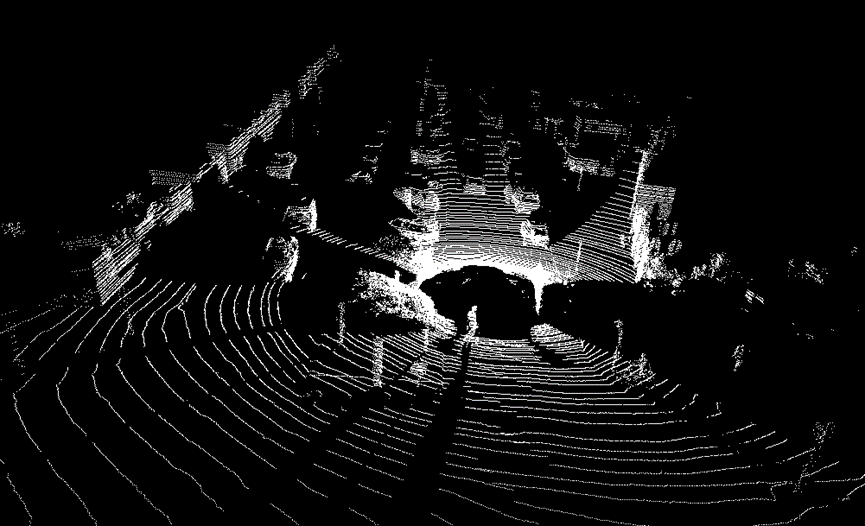
整个场景可视化:
import numpy as np
import open3d as o3d
def read_kitti_bin_point_cloud(bin_file):
# 加载.bin文件
point_cloud_np = np.fromfile(bin_file, dtype=np.float32).reshape(-1, 4)
# 仅使用X, Y, Z坐标,忽略反射率
point_cloud_o3d = o3d.geometry.PointCloud()
point_cloud_o3d.points = o3d.utility.Vector3dVector(point_cloud_np[:, :3])
# 设置所有点为白色
point_cloud_o3d.colors = o3d.utility.Vector3dVector(np.ones((len(point_cloud_np), 3)))
return point_cloud_o3d
def visualize_point_cloud(point_cloud_o3d):
# 创建一个可视化窗口
vis = o3d.visualization.Visualizer()
vis.create_window(window_name="KITTI Point Cloud", width=800, height=600)
# 设置窗口的背景为黑色
opt = vis.get_render_option()
opt.point_size = 1.0
opt.background_color = np.asarray([0, 0, 0])
# 将点云数据加入可视化窗口
vis.add_geometry(point_cloud_o3d)
# 进行可视化
vis.run()
vis.destroy_window()
if __name__ == "__main__":
bin_file = '/root/autodl-data/IA-SSD/data/kitti/training/velodyne/002147.bin' # 更改为你的KITTI .bin文件路径
point_cloud_o3d = read_kitti_bin_point_cloud(bin_file)
visualize_point_cloud(point_cloud_o3d)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
效果:
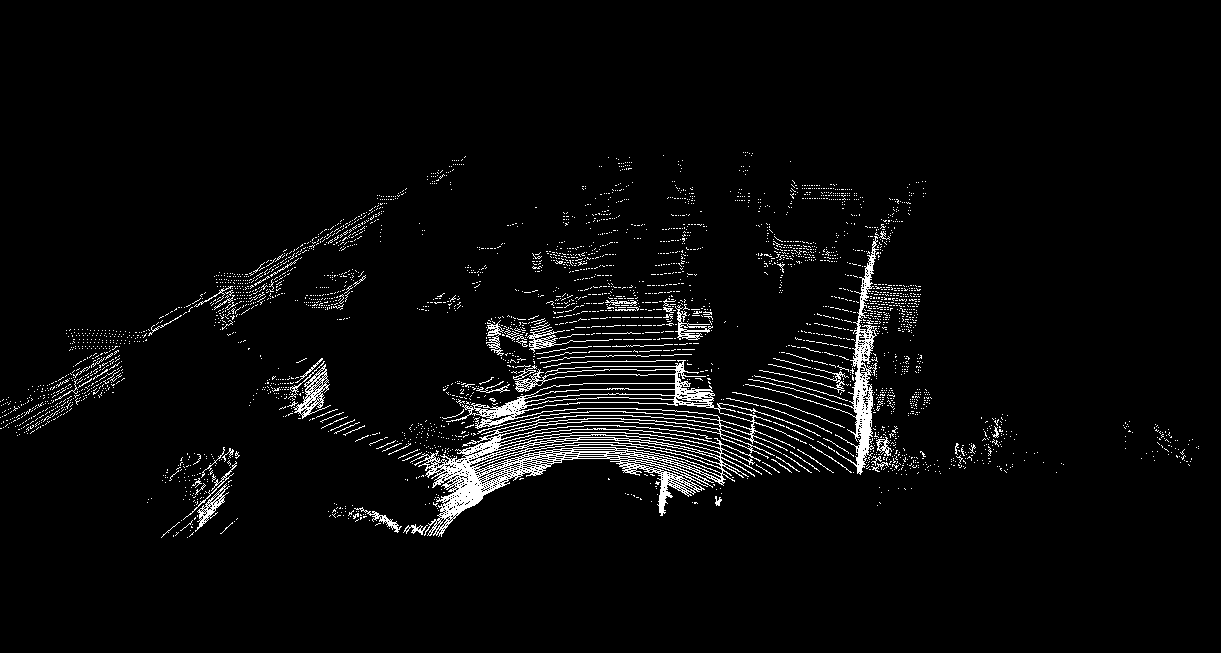
KITTI范围:point_cloud_range = [0, -40, -3, 70.4, 40, 1]
import numpy as np
import open3d as o3d
def read_kitti_bin_point_cloud(bin_file, point_cloud_range):
# 加载.bin文件
point_cloud_np = np.fromfile(bin_file, dtype=np.float32).reshape(-1, 4)
# 应用点云范围筛选
mask = (point_cloud_np[:, 0] >= point_cloud_range[0]) & (point_cloud_np[:, 0] <= point_cloud_range[3]) & \
(point_cloud_np[:, 1] >= point_cloud_range[1]) & (point_cloud_np[:, 1] <= point_cloud_range[4]) & \
(point_cloud_np[:, 2] >= point_cloud_range[2]) & (point_cloud_np[:, 2] <= point_cloud_range[5])
point_cloud_np = point_cloud_np[mask][:, :3]
# 使用X, Y, Z坐标创建Open3D点云对象
point_cloud_o3d = o3d.geometry.PointCloud()
point_cloud_o3d.points = o3d.utility.Vector3dVector(point_cloud_np)
# 设置所有点为白色
point_cloud_o3d.colors = o3d.utility.Vector3dVector(np.ones((len(point_cloud_np), 3)))
return point_cloud_o3d
def visualize_point_cloud(point_cloud_o3d):
# 创建一个可视化窗口
vis = o3d.visualization.Visualizer()
vis.create_window(window_name="KITTI Point Cloud", width=800, height=600)
# 设置窗口的背景为黑色
opt = vis.get_render_option()
opt.point_size = 1.0
opt.background_color = np.asarray([0, 0, 0])
# 将点云数据加入可视化窗口
vis.add_geometry(point_cloud_o3d)
# 进行可视化
vis.run()
vis.destroy_window()
if __name__ == "__main__":
bin_file = '/root/autodl-data/IA-SSD/data/kitti/training/velodyne/002147.bin' # 更改为你的KITTI .bin文件路径
# 定义点云显示范围
point_cloud_range = [0, -40, -3, 70.4, 40, 1]
point_cloud_o3d = read_kitti_bin_point_cloud(bin_file, point_cloud_range)
visualize_point_cloud(point_cloud_o3d)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
效果:
推荐阅读
相关标签

