
热门标签
热门文章
- 1电话营销机器人具体是怎么运行的呢?_freeswitch 营销机器人模块
- 2AI实战 | AI算法能不能协助英语老师出一份nb的考卷?
- 3AI工具 Github项目_ai推文工具 github
- 4verilog基础篇--常用的信号生成模块_verilog产生脉冲信号
- 5计算机二级选择题复习整理(公共基础部分)_计算机等级 软件工程基础 选择题
- 6IntelliJ IDEA下git版本回退,版本还原_checkout tag or revision
- 7数据结构与算法——排序算法_冒泡排序的堆栈
- 8mysql+ php_php+mysql
- 9大模型中常用的分词器Tokenizer学习总结记录与代码实现_大模型分词器
- 10Git clone/pull/push需要输入密码解决方法(全网最靠谱版本)_git clone git@ 密码
当前位置: article > 正文
STM32 4*4矩阵键盘快速上手使用及其实现程序设计HAL库/标准库
作者:2023面试高手 | 2024-04-16 00:14:34
赞
踩
STM32 4*4矩阵键盘快速上手使用及其实现程序设计HAL库/标准库
4X4矩阵键盘实物
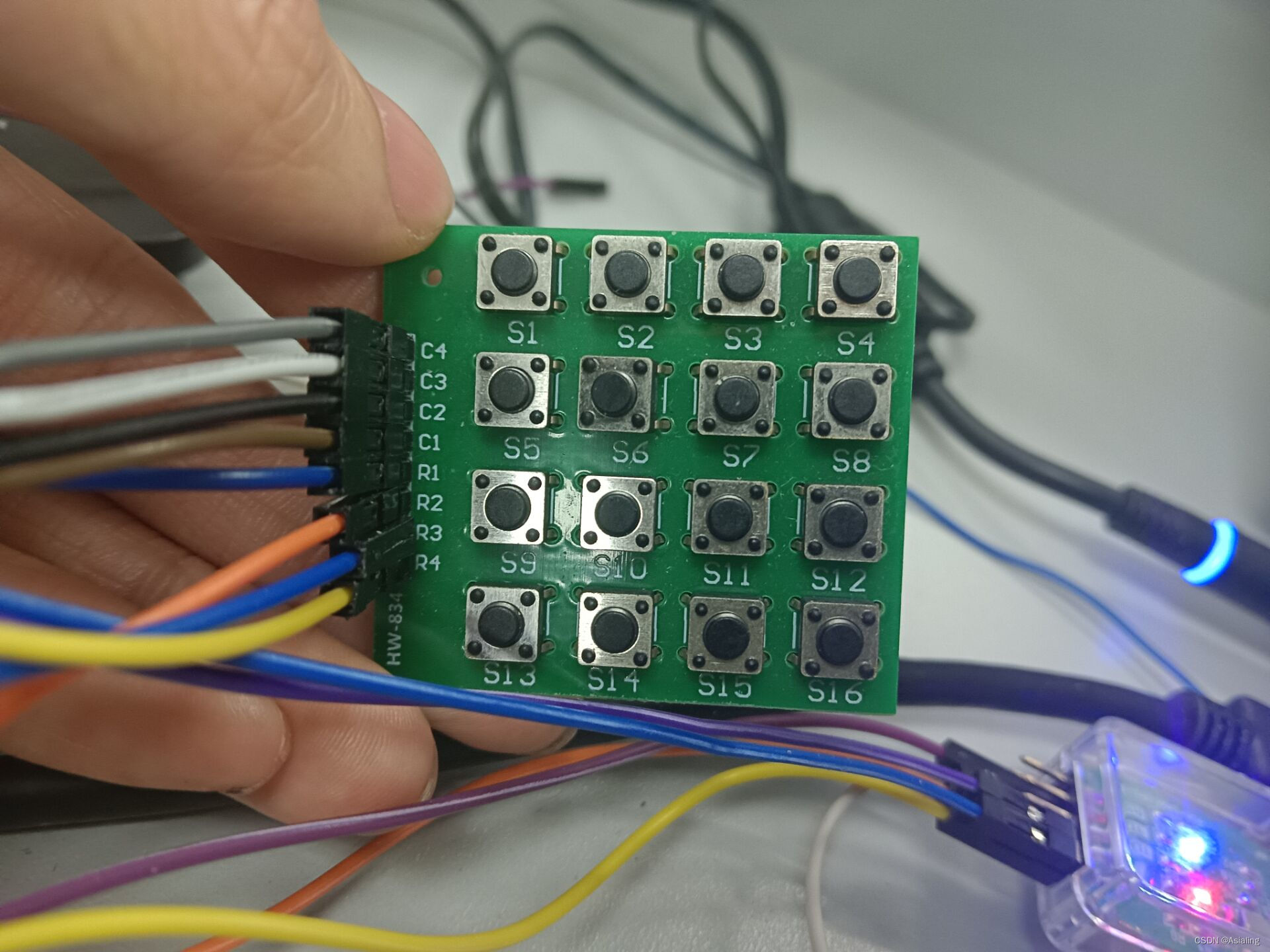
4x4 矩阵键盘是一种常见的输入设备,通常由 16 个按键组成,排列成一个 4 行 4
列的矩阵。每个按键在按下时会连接某一行和某一列,通过扫描矩阵中的行和列,可以确定用户按下的是哪一个按键。
4X4矩阵键盘原理图
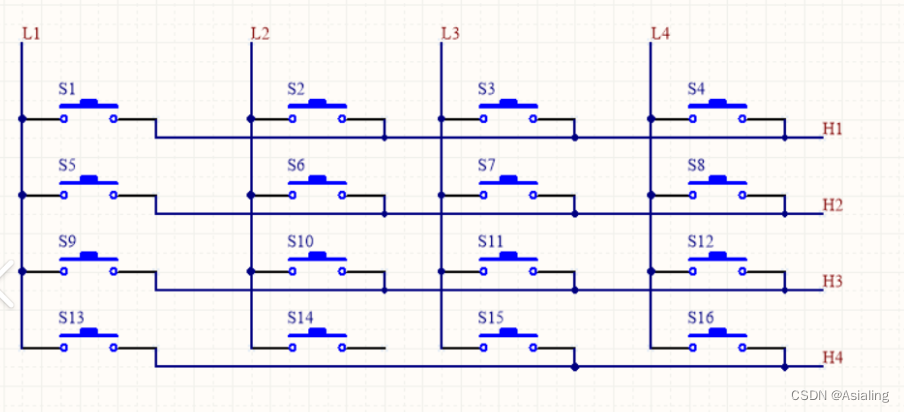
原理介绍
在使用这个模块的时候,最简单的方法是需要8个引脚,其中4个分别代表4行,另外4个代表4列。
代表行的引脚需要设置成推挽输出模式,代表列的引脚需要设置成上拉输入模式.。
当然你反着去设置也是完全没有问题的,即:
代表行的引脚需要设置成上拉输入模式,代表列的引脚需要设置成推挽输出模式.。
只不过这样的话,程序要稍微更改或者你直接把行作为列去使用。
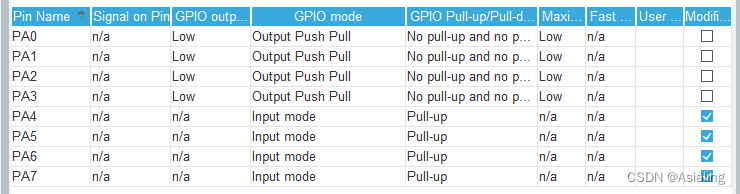
我使用的是行设置成推挽输出模式,列设置成上拉输入模式。
然后,我们让行的4个引脚其中一个输出低电平,其他输出高电平,此时在循环中去不断循环等待,当我们按下一个在当前低电平引脚对应行的按键的时候,被设置为上拉输入模式的列引脚就会因为当前行是低电压而被拉低,这样我们就可以判断这个行上面哪个列引脚被拉下了。
接下来就是一个循环,让4个行引脚分别1个输出低电平,3个输出高电平。芯片的循环速度很快,所以你完全不用怀疑这种做法的可行性。
具体步骤
- 设置8个引脚(4个上拉输入模式,4个推挽输出模式)
- 书写扫描逻辑(为了照顾标准库和HAL库的同学,我尽量减少HAL库函数的使用,因为笔者用的HAL库)
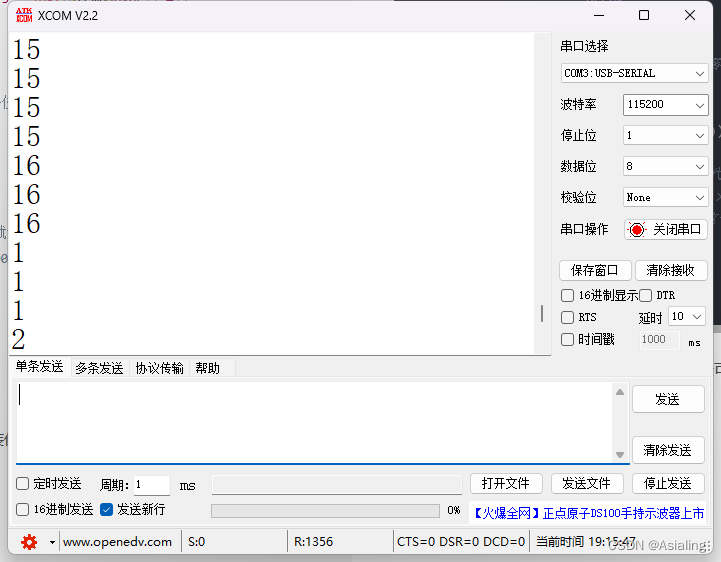
int main(void) { uint8_t regval = 0x07; while (1) { /* 4X4矩阵键盘程序 硬件连线: PA0 - R1 控制 S13~16 PA1 - R2 控制 S9~12 PA2 - R3 控制 S5~8 PA3 - R4 控制 S0~4 PA4 - C4 控制 S0~13 PA5 - C3 控制 S2~14 PA6 - C2 控制 S3~15 PA7 - C1 控制 S4~16 */ /*置位 0x07->0x0B->0x0D->0x0E->0x07 循环*/ GPIOA->BSRR |= regval; /**/ uint8_t temp = GPIOA->IDR & 0xF0; /*消抖*/ HAL_Delay(10); /*当有按键按下时*/ if(temp != 0xF0) { temp = GPIOA->IDR & (0xF0 + regval); switch(temp & 0xF0) { case 0xE0: printf("%d\r\n",(int)(1 + (3 - log2(~temp&0x0F))*4)); break; case 0xD0: printf("%d\r\n",(int)(2 + (3 - log2(~temp&0x0F))*4)); break; case 0xB0: printf("%d\r\n",(int)(3 + (3 - log2(~temp&0x0F))*4)); break; case 0x70: printf("%d\r\n",(int)(4 + (3 - log2(~temp&0x0F))*4)); break; } } GPIOA->BSRR |= regval << 16;/*置零寄存器数据位*/ /*0x07 0x0B 0x0D 0x0E 循环*/ regval = (~((~regval& 0x0F) >> 1))& 0x0F; /* 如果regval在0x0E之后继续进上一行的代码运算,就会变成0X0F 即0000 1110 ~ -> 1111 0001 & 0x0F-> 0001 >> 1 -> 0000 0000 ~-> 1111 1111 &0x0F -> 0000 1111 所以,我们让他置为0x07初始值来完成这个循环*/ if((regval & 0x0F) == 0x0F) regval = 0x07; } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
这个逻辑我直接写在主函数里面,当然你完全可以封装他为一个函数,我这样操作也只是为了方便测试和使用。
附录
测试结果
其他代码相关程序
printf通过串口输出程序:
#if 1
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//重定向fputc函数
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, HAL_MAX_DELAY);
return ch;
}
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/431139
推荐阅读

相关标签

