
- 1Syncovery for Mac:高效文件备份和同步工具
- 2Python 数据结构和算法实用指南(三)
- 3Transformers 库 与 Transformer 有什么区别?_transformer和transformers 区别
- 4语言的未来:深度学习在自然语言处理中的革命
- 5erlang rabbitmq源码解析_【RabbitMQ学习记录】- 消息队列存储机制源码分析
- 603 JavaScript学习:浏览器中执行 JavaScript
- 7【消息中心】kafka消费失败重试10次的问题_kafka消费错误一直重试
- 8江科大STM32 终_stm32江科大
- 9vue使用element-ui 实现多套自定义主题快速切换_element ui主题切换
- 10python中24≤28<25是否合法_Python中条件24<=28<25是合法的,且输出为false。_学小易找答案...
机器人建模中移动关节如何建立坐标系_工业机器人运动学基本概念
赞
踩

这是自动化圈的第 6 篇文章。
本文介绍的运动学概念,是学习工业机器人的必须清楚的概念。尤其是在处理视觉问题时。运动学主要研究的问题是确定机器人在空间中的位置,只有知道机器人在什么位置,机器人控制柜里的CPU才能去控制机器人。机器人运动学的可分为两个基本问题:正运动和逆运动。正向运动学即给定机器人各关节变量,计算机器人末端的位置姿态;逆向运动学即已知机器人末端的位置姿态,计算机器人对应位置的全部关节变量,逆问题求解比较困难。
自由度
自由度通俗来讲就是描述物体运动的灵活程度,任何一个没有受约束的物体,在空间均具有6个独立的运动。

以上图的长方形为例,它在直角坐标系OXYZ中可以有3个平移运动和3个转动。3个平移运动分别是沿X,Y,Z轴的平移运动,3个转动分别是绕X,Y,Z轴的转动。习惯上把上述6个独立运动称做6个自由度。

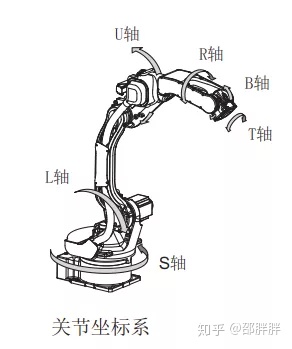
如上图,六轴工业机器人一般有6个自由度,常见的六轴工业机器人包含旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T轴)。
位姿
位姿用来描述空间中某个物体的位置和方位,位置通常使用坐标(x,y,z)描述,方位使用(Rx,Ry,Rz)描述,即绕x,y,z轴倾斜的角度。因此,通过(x,y,z,Rx,Ry,Rz)就可以确定机器人在空间任意位置的姿态。
坐标系
工业机器人常见坐标系通常有:基座标系,大地坐标系,工具坐标系,工件坐标系(用户坐标系)、关节坐标系等。


基坐标系,顾名思义是根据机器人基座建立的直角坐标系,大地坐标系是以相对静止的大地为参考,有时候机器人基座是固定在大地上的,那基座标系和大地坐标系重合,如果机器人基座如上图一样是移动的,那基坐标系和大地坐标系是两个不同的坐标系。

工具坐标系是机器人手腕法兰盘安装的工具的有效方向作为z轴,建立的直角坐标系。

工件坐标系:也成为用户坐标系,是用户自己的定义的XYZ直角坐标。当工件的形状是倾斜的时候,建立用户坐标系,调试起来会比较方便。
关节坐标使机器人各轴单独运动,称为关节坐标系
空间方位
前面通过坐标系可以确定机器人在空间中的位置(x,y,z),那么确定机器人的角度旋转通常有RPY角和欧拉角表达方式。他们区别是RPY角是绕定轴旋转,欧拉角是绕自身的轴旋转(动轴旋转)。
RYP角
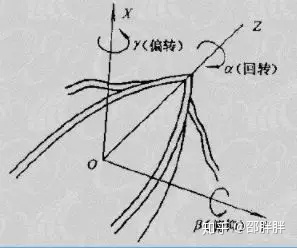
RPY角是描述船舶在海中航行时姿态的一种方法。
Roll:将船舶的行驶方向取为z轴,则绕z轴的旋转(α角)称为滚动;
Pitch:把绕Y轴的旋转(β角)称为俯仰;
Yaw:把垂直方向取为X轴,绕X轴的旋转(γ角)称为偏转;
z-y-x欧拉角
初始状态时,运动坐标系的初始方位与参考系相同,当开始运动时,首先使运动系Z轴转α角,然后绕运动系的Y轴转β角,最后绕运动系的X轴转γ角。
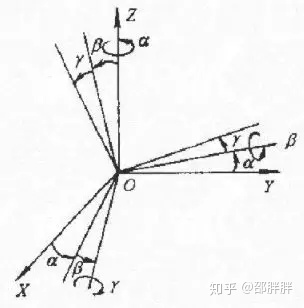
欧拉角是表达旋转的一种简单方法,由三个角度组成,其值分别代表物体绕坐标系的三个轴(x, y, z轴)的旋转角度,不同的旋转顺序会有不同的旋转结果。这种描述中的各次转动都是相对于运动坐标系的某轴进行的,而不是相对于固定的参考系,这就是动轴旋转。



