
热门标签
热门文章
- 1会话劫持 攻击:了解 和预防_会话数攻击
- 2vscode用git进行pull操作时提示:在签出前请清理存储库工作树_please clean your respository
- 3ShardingSphere系列01:Shardingjdbc实现分表(含项目实践)_shardingsphere分表
- 4时空预测 | 基于深度学习的碳排放时空预测模型_深度学习 发动机积碳预测
- 5互联网大厂职场各职级P6/P7和核心能力_大厂p7
- 6post formdata传值
- 72024年分布式场景下的并发安全问题,互联网行业“中年”危机_java并发安全问题案例分享
- 82022,银行数据能力怎么建?_如何构建商业银行的数据分析能力
- 9one-api离线安装解决failed to get gpt-3.5-turbo token encoder_failed to get gpt-3.5-turbo token encoder:
- 10全面理解Python中的迭代器_python 迭代器
当前位置: article > 正文
qt 实现模拟实际物体带速度的移动(水平、垂直、斜角度)——————附带完整代码
作者:2023面试高手 | 2024-06-17 09:54:40
赞
踩
qt 实现模拟实际物体带速度的移动(水平、垂直、斜角度)——————附带完整代码
0 效果
实现后的效果如下



可以显示属性(继承自QToolButton):

鼠标悬浮显示文字
按钮显示文字
1 原理
类继承自QToolButton,默认朝右行驶为正方向,设置图片为按钮的图标:
1.1 图片旋转
- 1,如果水平移动,朝左移动(纵坐标差值为0,横坐标差值为负【终点-起点,后面计算方式相同】),则对图片进行镜像处理
image.mirrored;
QImage rotateImage(const QImage &image, qreal fAngle) { QTransform transform; transform.rotate(fAngle); return image.transformed(transform, Qt::SmoothTransformation); } QImage tmp; if(r_x == 0 ) //Y轴 { if(r_y > 0) { tmp = rotateImage(m_image,90.0); } else { tmp = rotateImage(m_image,270.0); } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
朝右
朝左
- 2,如果是垂直移动,朝下移动(水平坐标差值为0,纵坐标差值大于0),把图片顺时针旋转90度;朝上移动(水平坐标差值为0,纵坐标差值小于0),图片顺指针旋转270度(对图片使用镜像
image.transformed处理);
QImage filp(const QImage &image, bool bIsHorizon) { return image.mirrored(bIsHorizon,!bIsHorizon); } else if(r_y == 0) //X轴 { if(r_x >0) { tmp = m_image; } else { tmp = filp(m_image,true); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17

朝下

朝上
- 3,如果是倾斜移动,计算弧度(纵坐标的差和横坐标的差的比值(tan值)取反正切值(
qAtan(r_y/r_x));),把弧度转为角度(qAtan(r_y/r_x)*180/PI;)【二、三象限的旋转角度为负数】;如果方向位于第2,3象限(因为x轴正向,为水平朝右,y轴正向,为垂直向下),则把车图片做镜像处理(image.transformed处理,把车头调为朝左);
//核心
QImage _filp = filp(m_image,true);
qreal k = qAtan(r_y/r_x)*180/PI;
tmp = rotateImage(_filp,k);
- 1
- 2
- 3
- 4
下面为四个象限的情况:
else if(r_x > 0 && r_y > 0) //第一象限 { qreal k = qAtan(r_y/r_x)*180/PI; tmp = rotateImage(m_image,k); qDebug()<<"第一象限:"<<k; } else if(r_x < 0 && r_y > 0) //第二象限 { QImage _filp = filp(m_image,true); qreal k = qAtan(r_y/r_x)*180/PI; qDebug()<<"第二象限:"<<k; tmp = rotateImage(_filp,360.0 + k);//顺时针旋转 //tmp = rotateImage(_filp, k);//逆时针旋转 }else if(r_x < 0 && r_y < 0) //第三象限 { QImage _filp = filp(m_image,true); qreal k = qAtan(r_y/r_x)*180/PI; tmp = rotateImage(_filp,k); qDebug()<<"第三象限:"<<k; } else if(r_x > 0 && r_y < 0) //第四象限 { qreal k = qAtan(r_y/r_x)*180/PI; tmp = rotateImage(m_image,360.0+k); //tmp = rotateImage(m_image, k); qDebug()<<"第四象限:"<<k; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
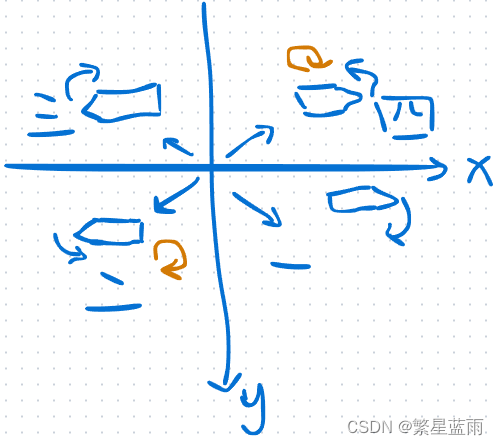
四个象限

左上(位于第三象限)

右上(位于第四象限)

右下(位于第一象限)
左下(位于第二象限)
1.2 物体按照现实中的实际距离带真实速度移动
前提:
- 1,使用
QTimer计时器,进行刷新,来更新物体位置;- 2,传入每个线段路径的起点和终点到向量(Vector)构成总路线;
- 3, 使用
move方法来进行物体移动;
算法:
- 1,根据总路线,依次计算出两点间的距离(两点间距离公式),累加后构成图形中的总距离
m_linedistance;
for(int i = 1;i< m_pointVector.size();i++)
{
m_linedistanceVector.push_back(qSqrt((m_pointVector[i].x() - m_pointVector[i-1].x())*(m_pointVector[i].x() - m_pointVector[i-1].x())+
(m_pointVector[i].y() - m_pointVector[i-1].y())*(m_pointVector[i].y() - m_pointVector[i-1].y())));
m_linedistance += m_linedistanceVector.back();
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 2,计算出图形中单次刷新的实际移动的距离(像素):
- 使用图形中的总距离
m_linedistance(单位:像素)除以输入的距离m_distance(单位:m),得到图形中1像素代表实际距离中多少米; - 使用速度
m_speed(单位:m/s)乘以时间time(单位:s,为QTimer的刷新时间)得到目前移动的像素;
- 使用图形中的总距离
qreal move_line = (time * m_speed)*m_linedistance/m_distance;
- 1
- 3,计算出坐标的变化:
- 计算方法:用上一步算出的实际移动的距离除以起点和终点两点间的距离得到移动的比列,起点的横、纵坐标分别加上比列乘以横、纵坐标的起终点之差,得到下一次移动后的坐标位置;
QPoint p;
qreal t = qSqrt((end.x() - start.x())*(end.x() - start.x()) + (end.y() - start.y())*(end.y() - start.y()));
p.setX((end.x() - start.x())*distance/t + start.x());
p.setY((end.y() - start.y())*distance/t + start.y());
- 1
- 2
- 3
- 4
-
- 更换线路:如果当前点移动的距离和超过起点和终点间的距离差(也就是换到下一段线路上,且不是终点时),下一段线路的应该移动的距离减去当前点移动后超过的距离值(为了使得最终用时无误)为实际移动距离;
if(m_linedistanceVector[m_curposindex] <= m_curlinedistance + move_line)//超越该点 { qDebug()<<"换点的距离:"<<"m_curlinedistance:"<<m_curlinedistance<<" m_linedistanceVector[m_curposindex]: "<<m_linedistanceVector[m_curposindex]; //下一个点移动的距离 - 上一点移动的还未移动完的距离:为了使驾驶的时间正确 m_curlinedistance = m_curlinedistance + move_line - m_linedistanceVector[m_curposindex]; m_curposindex++; if(m_curposindex == m_pointVector.size() - 1)//当前点在终点 { m_curlinedistance = 0; m_curposx = m_pointVector.back().x(); m_curposy = m_pointVector.back().y(); } else { QPoint pt = getPoswithLinedistance(m_curlinedistance, m_pointVector[m_curposindex], m_pointVector[m_curposindex+1]); m_curposx = pt.x(); m_curposy = pt.y(); //旋转图标位置 setImageRote(m_pointVector[m_curposindex].x(), m_pointVector[m_curposindex].y(), m_pointVector[m_curposindex+1].x(), m_pointVector[m_curposindex+1].y()); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 4,终止:如果该点为最后一个点,则车辆停止(停止定时器刷新);
class xx{
//计时器
QTimer m_timer;
};
if(m_curposindex == m_pointVector.size() -1){//只剩最后一个坐标时,停止计时器(停车)
m_timer.stop();
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
2 完整实现
2.1 将车辆按钮封装为一个类:
#ifndef VEHICLE_TOOLBUTTON_H #define VEHICLE_TOOLBUTTON_H #include <QToolButton> #include <QTimer> class VehicleToolButton : public QToolButton { Q_OBJECT public: /** * @brief 使用默认图片 * @param parent */ VehicleToolButton(QWidget *parent = nullptr); /** * @brief VehicleToolButton * @param image:按钮的图标的文件路径 * @param size:按钮大小 * @param parent */ VehicleToolButton(QString imagePath, QSize size,QWidget *parent = nullptr); ~VehicleToolButton(); public: /** * @brief 得到速度 * @return */ qreal getSpeed(); /** * @brief 强制设置显示位置 * @param x * @param y */ void setCurCoordinate(int x,int y); /** * @brief 设置现在所处位置 * @param x * @param y */ void setCurrentPosition(int x, int y); /** * @brief 改变速度 * @param _speed */ void setSpeed(qreal _speed); /** * @brief 设置行进参数 * @param _v_point * @param _distance * @param _speed */ void setData(QVector<QPoint> _v_point, qreal _distance, qreal _speed); /** * @brief 设置图标图片 * @param image */ void setImage(QImage image); /** * @brief 设置图标大小 * @param size */ void setSize(QSize size); private: /** * @brief 计算从起点到终点方向距离distance的坐标点 * @param distance * @param start * @param end * @return */ QPoint getPoswithLinedistance(qreal distance,QPoint start,QPoint end); /** * @brief 按水平轴或者垂直线作镜像翻转,bIsHorizon为true按水平轴,false按垂直方向 * @param image * @param bIsHorizon * @return */ QImage filp(const QImage& image,bool bIsHorizon); /** * @brief 根据弧度值(角度值)起点(x1,y1)和终点(x2,y2)确定图片旋转的角度 * @param x1 * @param y1 * @param x2 * @param y2 */ void setImageRote(int x1,int y1,int x2,int y2); /** * @brief 将图片按顺时针方向旋转一定的角度,fAngle为角度值 * @param image * @param fAngle * @return */ QImage rotateImage(const QImage& image,qreal fAngle); /** * @brief 根据弧度值(角度值)r_x,r_y确定图片旋转的角度 * @param r_x * @param r_y */ void setImageRote(qreal r_x,qreal r_y); /** * @brief //根据车速和运动轨迹计算time时间之后位置,timer事件调用move()函数移动到该位置, * @param time * @param x * @param y */ void getCurrentPos(qreal time,int& x,int& y); public slots: /** * @brief 刷新图片 */ void updatedisplay(); /** * @brief 开始定时器 * @param _msec */ void startTimer(int _msec); private: QImage m_image;//按钮图标 QSize m_pixSize;//按钮大小 //车辆行进数据结构 QVector<QPoint> m_pointVector; //行驶路径点集合(图上位置) QVector<qreal> m_linedistanceVector; //行驶路径段在图上的线段长度 qreal m_distance; //行驶路径总长度(单位m) qreal m_linedistance; //行驶路径在图上的总长度 int m_curposindex; //当前所在点的下标 qreal m_curlinedistance; //当前所在线段上距离 qreal m_curlinetotledistance; //当前行驶完成的路径长度总和 int m_curposx; //当前在图上的点X坐标 int m_curposy; //当前在图上的点Y坐标 qreal m_speed; //当前车速 //设置刷新时间(毫秒) int m_refreshTime = 10; //计时器 QTimer m_timer; signals: /** * @brief 停止移动 */ void stopVehicleMove(); }; #endif // VEHICLE_TOOLBUTTON_H
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
#include "vehicle_toolbutton.h" #include <qmath.h> #include <QDebug> #define PI 3.1415926 VehicleToolButton::VehicleToolButton(QWidget *parent) : QToolButton(parent){ //设置按钮大小 this->setFixedSize(50, 50); //设置图标大小 this->setIconSize(QSize(50,50)); this->setAutoRaise(true);//设置按钮自动凸起 this->setToolButtonStyle(Qt::ToolButtonTextUnderIcon); QPixmap icoPix(":/Image/car.png"); //QPixmap icoPix = QPixmap::fromImage(l_image); icoPix.scaled(QSize(50,50), Qt::IgnoreAspectRatio, Qt::SmoothTransformation); m_image = icoPix.toImage(); m_pixSize = QSize(50,50); this->setIcon(QIcon(icoPix)); } VehicleToolButton::VehicleToolButton(QString imagePath, QSize size, QWidget *parent) :QToolButton(parent), m_pixSize(size) { m_image.load(imagePath); //设置按钮大小 this->setFixedSize(size.width(), size.height()); //设置图标大小 this->setIconSize(size); this->setAutoRaise(true);//设置按钮自动凸起 this->setToolButtonStyle(Qt::ToolButtonTextUnderIcon); QPixmap icoPix = QPixmap::fromImage(m_image); icoPix.scaled(size, Qt::IgnoreAspectRatio, Qt::SmoothTransformation); m_image = icoPix.toImage(); this->setIcon(QIcon(icoPix)); } VehicleToolButton::~VehicleToolButton() { } void VehicleToolButton::updatedisplay() { int x=0, y=0; getCurrentPos(m_refreshTime*0.001, x, y);//得到现在的坐标 this->move(x, y);//移动 if(m_curposindex == m_pointVector.size() -1){//只剩最后一个坐标时,停止计时器(停车) //emit stopVehicleMove(); m_timer.stop(); } } void VehicleToolButton::startTimer(int _msec) { m_refreshTime = _msec; //关联计时器 //connect(&m_timer, &QTimer::timeout, this, &VehicleToolButton::updatedisplay); //关联计时器 connect(&m_timer, &QTimer::timeout, this, &VehicleToolButton::updatedisplay, Qt::UniqueConnection); m_timer.start(_msec); } qreal VehicleToolButton::getSpeed() { return m_speed; } //根据车速和运动轨迹计算time时间之后位置,timer事件调用move()函数移动到该位置 void VehicleToolButton::getCurrentPos(qreal time, int &x, int &y) { if(m_linedistance <=0 )//所有点之间的距离为0 return; //time = 刷新时间(单位为s) //time * m_speed:得到图形中点的距离长度 //m_linedistance/m_distance:图形中的距离和设置距离的比列(图形中的距离1像素对应设置的实际距离?米) qreal move_line = (time * m_speed)*m_linedistance/m_distance; if(m_curposindex == m_pointVector.size()-1)//当前点在终点 { } else { if(m_linedistanceVector[m_curposindex] <= m_curlinedistance + move_line)//超越该点 { //下一个点移动的距离 - 上一点移动的还未移动完的距离:为了使驾驶的时间正确 m_curlinedistance = m_curlinedistance + move_line - m_linedistanceVector[m_curposindex]; m_curposindex++; if(m_curposindex == m_pointVector.size() - 1)//当前点在终点 { m_curlinedistance = 0; m_curposx = m_pointVector.back().x(); m_curposy = m_pointVector.back().y(); } else { QPoint pt = getPoswithLinedistance(m_curlinedistance, m_pointVector[m_curposindex], m_pointVector[m_curposindex+1]); m_curposx = pt.x(); m_curposy = pt.y(); //旋转图标位置 setImageRote(m_pointVector[m_curposindex].x(), m_pointVector[m_curposindex].y(), m_pointVector[m_curposindex+1].x(), m_pointVector[m_curposindex+1].y()); } } else { m_curlinedistance += move_line; QPoint pt = getPoswithLinedistance(m_curlinedistance, m_pointVector[m_curposindex], m_pointVector[m_curposindex + 1]); m_curposx = pt.x(); m_curposy = pt.y(); } m_curlinetotledistance += move_line; } x = m_curposx; y = m_curposy; } void VehicleToolButton::setCurCoordinate(int x, int y) { m_curposx = x; m_curposy = y; } void VehicleToolButton::setCurrentPosition(int x, int y) { this->move(x,y); } void VehicleToolButton::setSpeed(qreal _speed) { m_speed = _speed; } //设置行进参数 void VehicleToolButton::setData(QVector<QPoint> _v_point, qreal _distance, qreal _speed) { m_pointVector.clear(); m_linedistanceVector.clear(); m_pointVector = _v_point; m_distance = _distance; m_speed = _speed; m_linedistance = 0;//距离总长度 m_curposindex = -1; m_curposx = -1; m_curposy = -1; m_curlinetotledistance = 0; //计算两点间的距离长度 for(int i = 1;i< m_pointVector.size();i++) { m_linedistanceVector.push_back(qSqrt((m_pointVector[i].x() - m_pointVector[i-1].x())*(m_pointVector[i].x() - m_pointVector[i-1].x())+ (m_pointVector[i].y() - m_pointVector[i-1].y())*(m_pointVector[i].y() - m_pointVector[i-1].y()))); m_linedistance += m_linedistanceVector.back(); } //位置坐标大于2个,设置最开始的坐标为起始位置,并旋转图片 if(m_pointVector.size() > 0 ) { m_curposindex = 0; m_curlinedistance = 0; m_curposx = m_pointVector[0].x(); m_curposy = m_pointVector[0].y(); if(m_pointVector.size() >1) setImageRote(m_pointVector[0].x(), m_pointVector[0].y(), m_pointVector[1].x(), m_pointVector[1].y()); } } void VehicleToolButton::setImage(QImage image) { m_image = image; } void VehicleToolButton::setSize(QSize size) { m_pixSize = size; } //计算从起点到终点方向距离distance的坐标点 QPoint VehicleToolButton::getPoswithLinedistance(qreal distance, QPoint start, QPoint end) { QPoint p; qreal t = qSqrt((end.x() - start.x())*(end.x() - start.x()) + (end.y() - start.y())*(end.y() - start.y())); p.setX((end.x() - start.x())*distance/t + start.x()); p.setY((end.y() - start.y())*distance/t + start.y()); return p; } //按水平轴或者垂直线作镜像翻转,bIsHorizon为true按垂直方向,false按水平轴 QImage VehicleToolButton::filp(const QImage &image, bool bIsHorizon) { return image.mirrored(bIsHorizon,!bIsHorizon); } //根据弧度值(角度值)起点(x1,y1)和终点(x2,y2)确定图片旋转的角度 void VehicleToolButton::setImageRote(int x1, int y1, int x2, int y2) { setImageRote(qreal(x2-x1),qreal(y2-y1)); } //将图片按顺时针方向旋转一定的角度,fAngle为角度值 QImage VehicleToolButton::rotateImage(const QImage &image, qreal fAngle) { // QMatrix matrix; // matrix.rotate(fAngle); // return image.transformed(matrix, Qt::SmoothTransformation); QTransform transform; transform.rotate(fAngle); return image.transformed(transform, Qt::SmoothTransformation); } //根据弧度值(角度值)r_x,r_y确定图片旋转的角度(核心算法) void VehicleToolButton::setImageRote(qreal r_x, qreal r_y) { //坐标和理论坐标轴不同,X轴正向为水平右,Y轴正向为垂直向下 QImage tmp; if(r_x == 0 && r_y == 0) return; if(r_x == 0 ) //Y轴 { if(r_y > 0) { tmp = rotateImage(m_image,90.0); } else { tmp = rotateImage(m_image,270.0); } } else if(r_y == 0) //X轴 { if(r_x >0) { tmp = m_image; } else { tmp = filp(m_image,true); } } else if(r_x > 0 && r_y > 0) //第一象限 { qreal k = qAtan(r_y/r_x)*180/PI; tmp = rotateImage(m_image,k); qDebug()<<"第一象限:"<<k; } else if(r_x < 0 && r_y > 0) //第二象限 { QImage _filp = filp(m_image,true); qreal k = qAtan(r_y/r_x)*180/PI; qDebug()<<"第二象限:"<<k; tmp = rotateImage(_filp,360.0 + k);//顺时针旋转 //tmp = rotateImage(_filp, k);//逆时针旋转 }else if(r_x < 0 && r_y < 0) //第三象限 { QImage _filp = filp(m_image,true); qreal k = qAtan(r_y/r_x)*180/PI; tmp = rotateImage(_filp,k); qDebug()<<"第三象限:"<<k; } else if(r_x > 0 && r_y < 0) //第四象限 { qreal k = qAtan(r_y/r_x)*180/PI; tmp = rotateImage(m_image,360.0+k); //tmp = rotateImage(m_image, k); qDebug()<<"第四象限:"<<k; } tmp.scaled(this->width(), this->height()); QPixmap icoPix = QPixmap::fromImage(tmp); icoPix.scaled(this->size(), Qt::IgnoreAspectRatio, Qt::SmoothTransformation); this->setIcon(QIcon(icoPix)); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
2.2 调用方法
class MainInterface : public QMainWindow { Q_OBJECT public: MainInterface(QWidget *parent = nullptr); ~MainInterface(); private: Ui::MainInterface *ui; private: VehicleToolButton* train; QVector<QPoint> m_trainMovePointVector; signals: void startTrainMove(int msec=10); private slots: void on_pushButton_clicked(); }; MainInterface::MainInterface(QWidget *parent) : QMainWindow(parent) , ui(new Ui::MainInterface) { ui->setupUi(this); QPixmap icoPix(":/Image/routeBackimage.png"); icoPix.scaled(ui->label->size(), Qt::IgnoreAspectRatio, Qt::SmoothTransformation); ui->label->setScaledContents(true); ui->label->setPixmap(icoPix); //构造方法1 // train = new VehicleToolButton(this); //构造方法2 train = new VehicleToolButton(QString(":/Image/car.png"), QSize(50,50),this); //目标点,路径长度,速度 train->setData(m_trainMovePointVector, 500.0, 20.0); train->hide(); train->setText("车:112"); train->setToolTip(QString("当前速度为:%1").arg(train->getSpeed())); connect(this, &MainInterface::startTrainMove, train, &VehicleToolButton::startTimer); // ui->label->hide(); } //按钮点击事件 void MainInterface::on_pushButton_clicked() { // QVector<QPoint> v_point; train->show(); m_trainMovePointVector.clear(); m_trainMovePointVector.push_back(QPoint(100,100)); m_trainMovePointVector.push_back(QPoint(400,400));//对角线右下 m_trainMovePointVector.push_back(QPoint(100,100));//对角线左上 m_trainMovePointVector.push_back(QPoint(100,400));//向下开 m_trainMovePointVector.push_back(QPoint(400,100));//对角线右上 m_trainMovePointVector.push_back(QPoint(100,400));//对角线左下 m_trainMovePointVector.push_back(QPoint(400,400));//向右开 m_trainMovePointVector.push_back(QPoint(400,100));//向上开 m_trainMovePointVector.push_back(QPoint(100,100));//向左开 // m_trainMovePointVector.clear(); // m_trainMovePointVector.push_back(QPoint(10, 822)); // m_trainMovePointVector.push_back(QPoint(1200, 822)); // m_trainMovePointVector.push_back(QPoint(10, 822)); train->setData(m_trainMovePointVector, 300.0, 20.0); emit startTrainMove(); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
3 完整代码
代码仓库(欢迎star):
参考
https://blog.csdn.net/u012739657/article/details/22645375
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/730636
推荐阅读
相关标签

