
- 1TCP三次握手详解_tcp三次握手报文分析
- 2【Django】 ManyToManyField 获取数据时 按添加时间排列_django manytomanyfield 排序
- 3Selenium模拟登陆QQ邮箱_selenium登录qq邮箱
- 4小程序实现微信登录Java后端(一)--前端实现_java小程序自动登录
- 5HTML5期末考核大作业 基于HTML+CSS+JavaScript仿王者荣耀首页 游戏网站开发 游戏官网设计与实现_html制作王者荣耀官网界面总结
- 6电脑蓝屏代码和解决方案_0 xc0000098acpi
- 7vue3-实战-03-管理后台路由分析搭建和登录模块开发_vue3 路由 新建api文件夹存放登录路由
- 8怎样处理 Safari 移动端对图片资源的限制_iossafari浏览器图片尺寸
- 9MyBatis 源码系列:MyBatis 解析配置文件、二级缓存、SQL
- 10python实现随机森林_随机森林 python
环境配置:Ubuntu18.04 ROS Melodic安装
赞
踩
前言
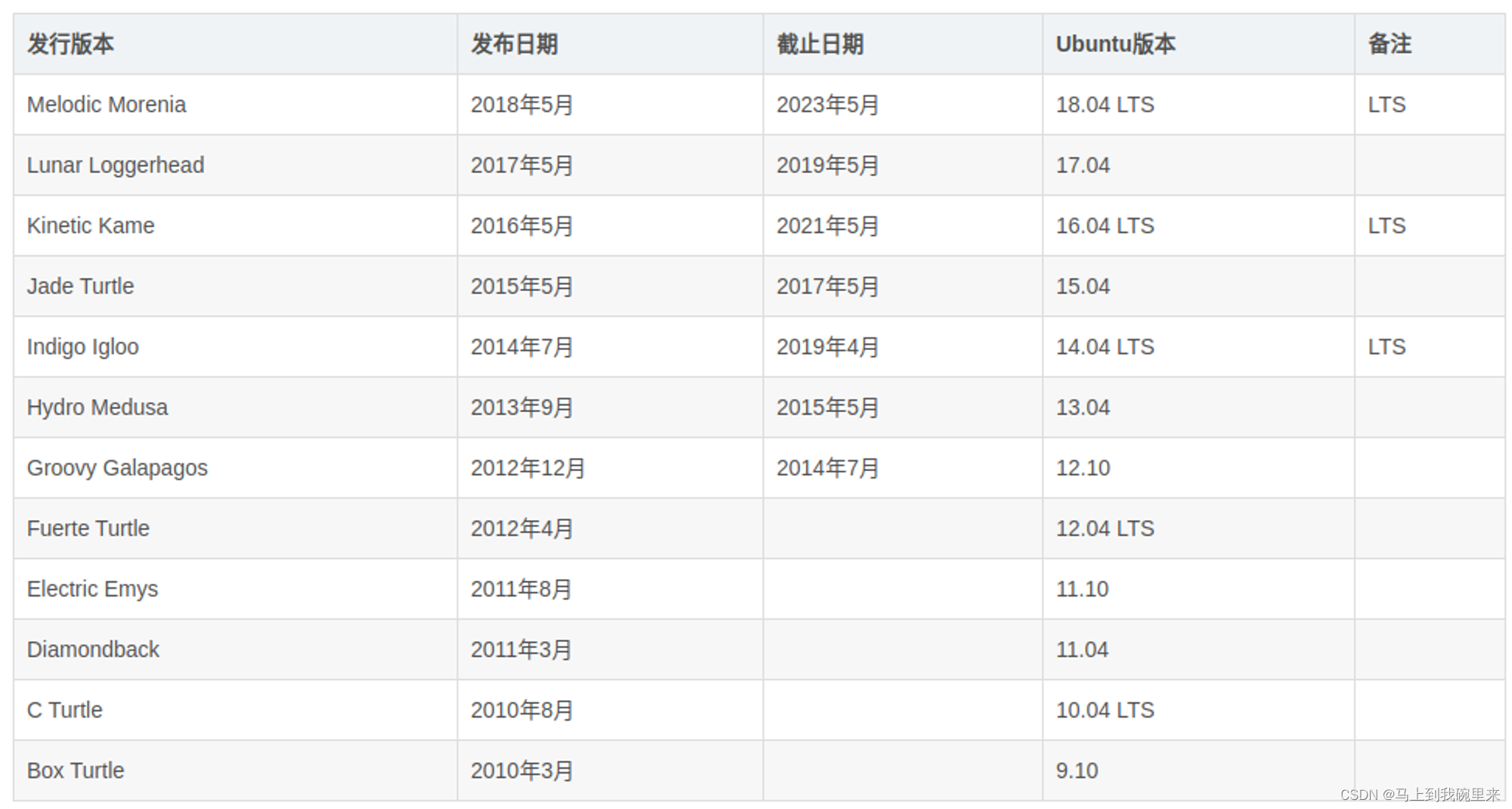
不同版本的Ubuntu与ROS存在对应关系。
ROS作为目前最受欢迎的机器人操作系统,其核心代码采用C++编写,并以BSD许可发布。ROS起源于2007年,是由斯坦福大学与机器人技术公司Willow Garage合作的Switchyard项目。2012年,ROS团队从Willow Garage独立出来,成立了一家非营利组织——开源机器人基金会(Open Source Robotics Foundation, OSRF),并于2013年将ROS移交给该基金会管理。
自2010年3月推出第一个发行版Box Turtle以来,ROS以每年1~2个版本的频率发布多个版本。作为次级操作系统,ROS官方推荐在Ubuntu操作系统上运行,并与Ubuntu发布节奏同步,偶数年发布维护周期为5年的长期演进版本,奇数年发布维护周期为2年的普通版本。然而,在2019年并未发布新版本。ROS已发布的历史版本如表1-1所示。
1 设置安装源
为了安装ROS Melodic,首先需要在Ubuntu 18.04 LTS上添加安装源到source.list,方法如下:
国外的:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
- 1

国内的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
- 1
清华的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
- 1
2 添加秘钥
2.1 添加秘钥
添加秘钥到本地的trusted数据库中并加以验证,方法如下:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
- 1
若密钥服务器hkp://ha.pool.sks-keyservers.net:80无法添加成功,则可以尝试hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.com:80。

2.2 安装公钥
在更新之前,需要安装公钥,否则无法验证签名,这一步也是原书没有的,需要朋友们注意,命令如下:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
- 1

3 安装
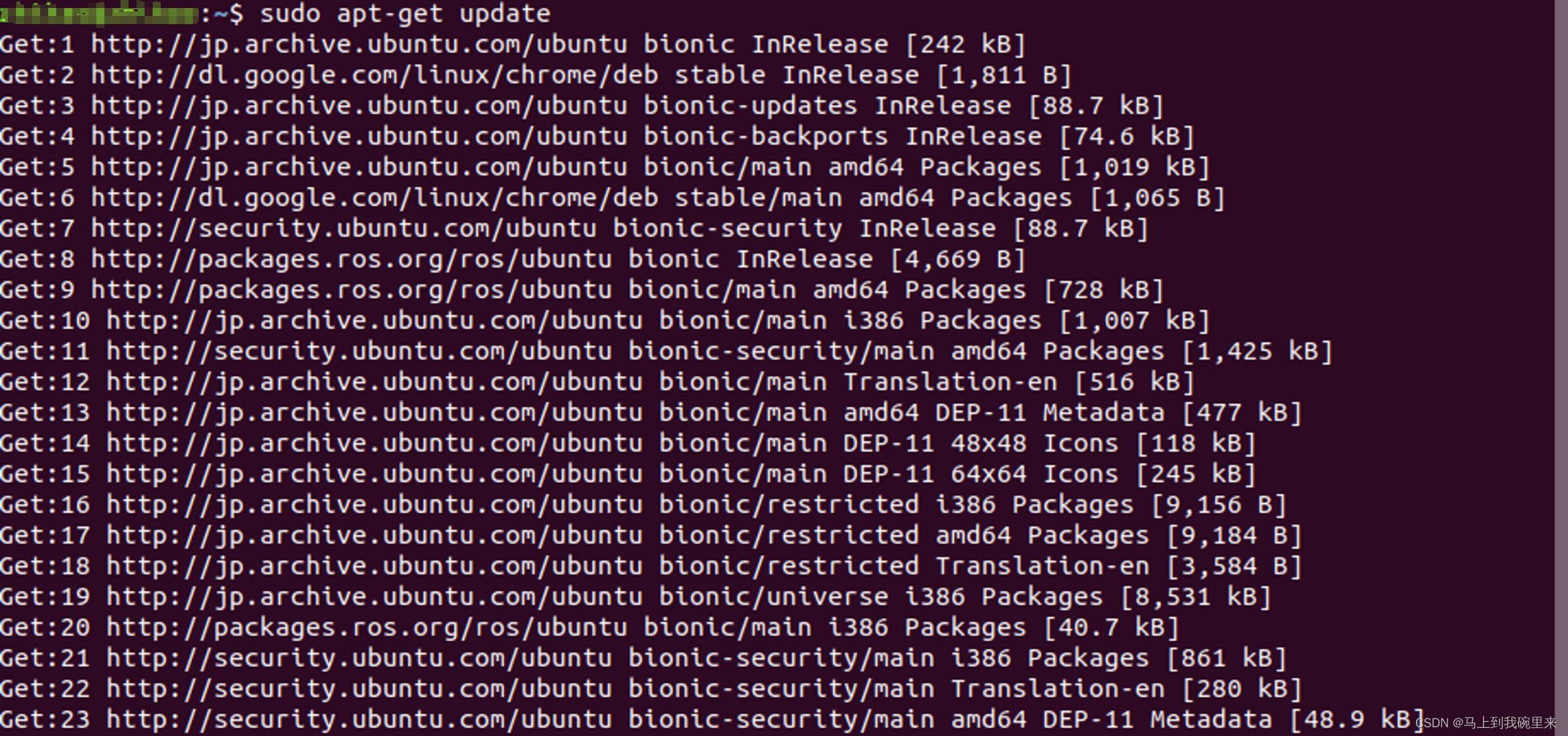
sudo apt-get update
- 1

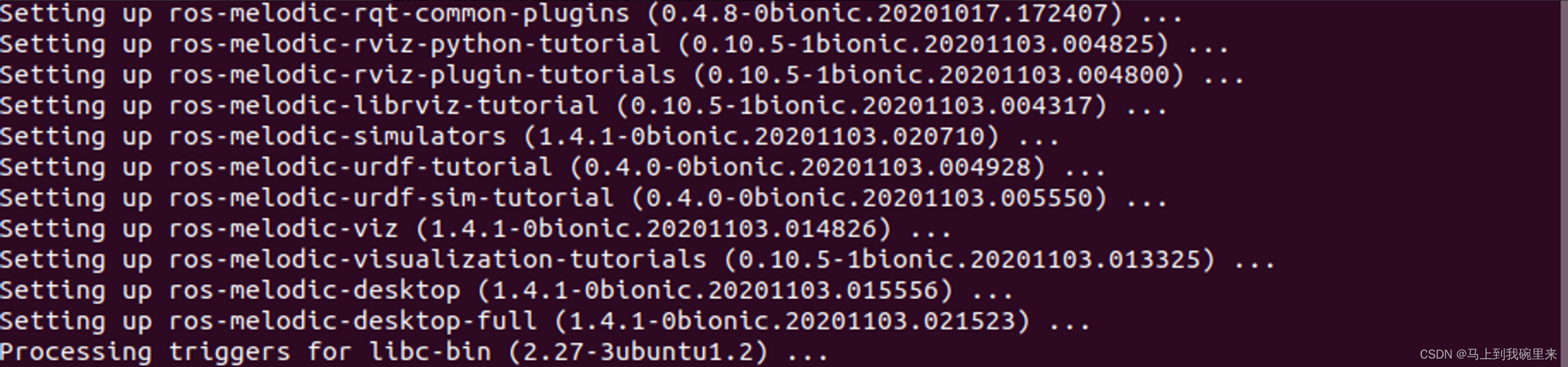
sudo apt-get install ros-melodic-desktop-full
- 1

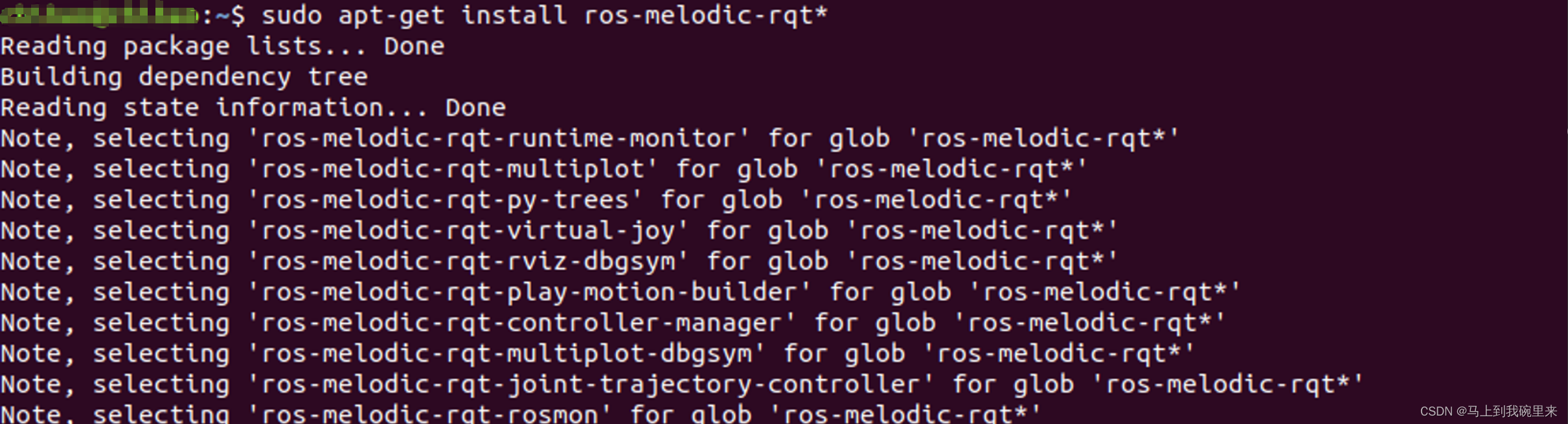
sudo apt-get install ros-melodic-rqt*
- 1

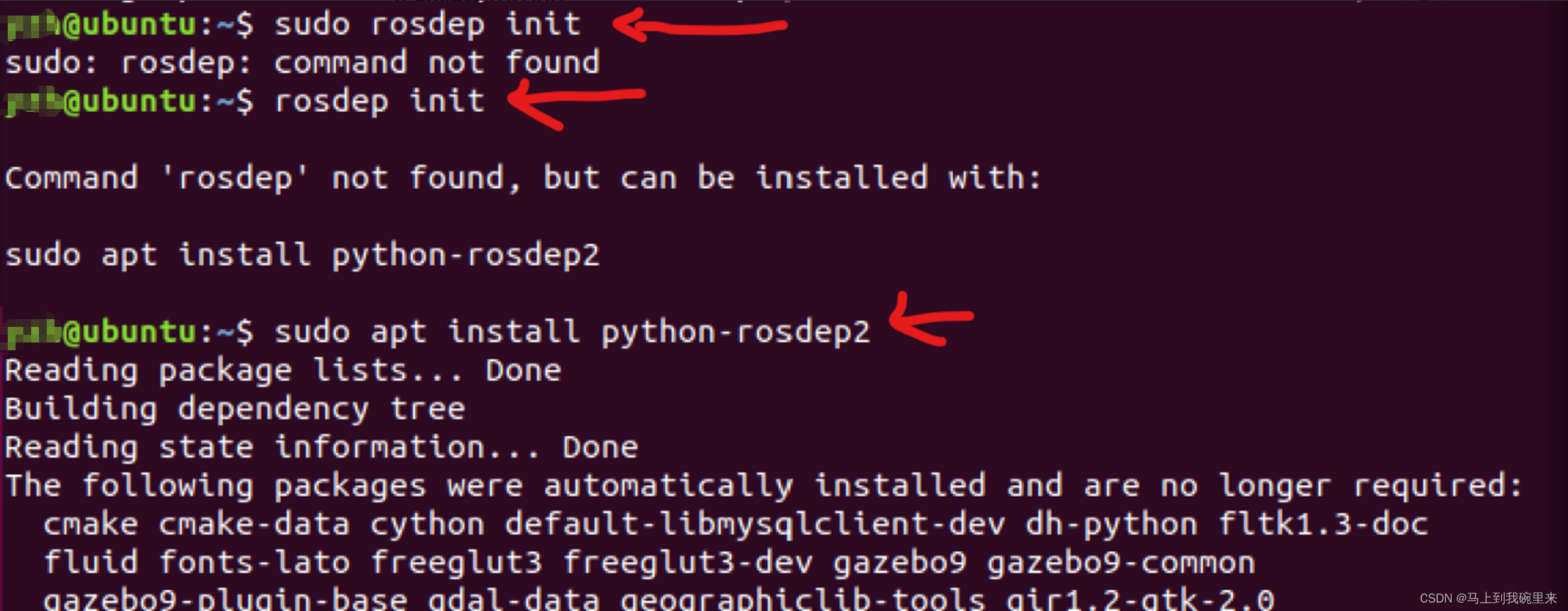
4 初始化rosdep
这一步或多或少因为在国内都会出现网络问题,参考以下文章:
Ubuntu 18.04 安装 ROS Melodic 中 sudo rosdep init 和 rosdep update 一定能成功的方法
尝试直接科学上网测试也不行,最终不知道怎么的多试了几次就ok了。
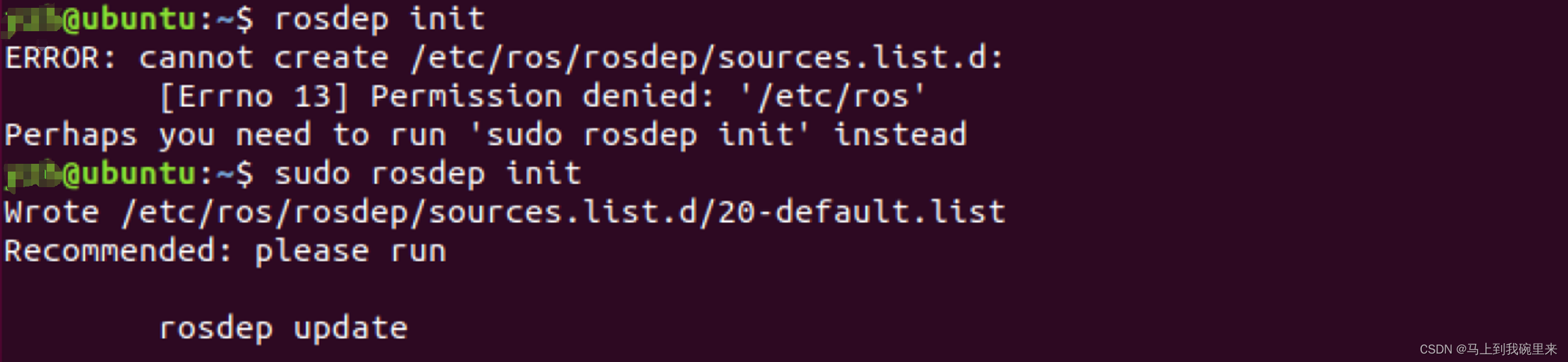
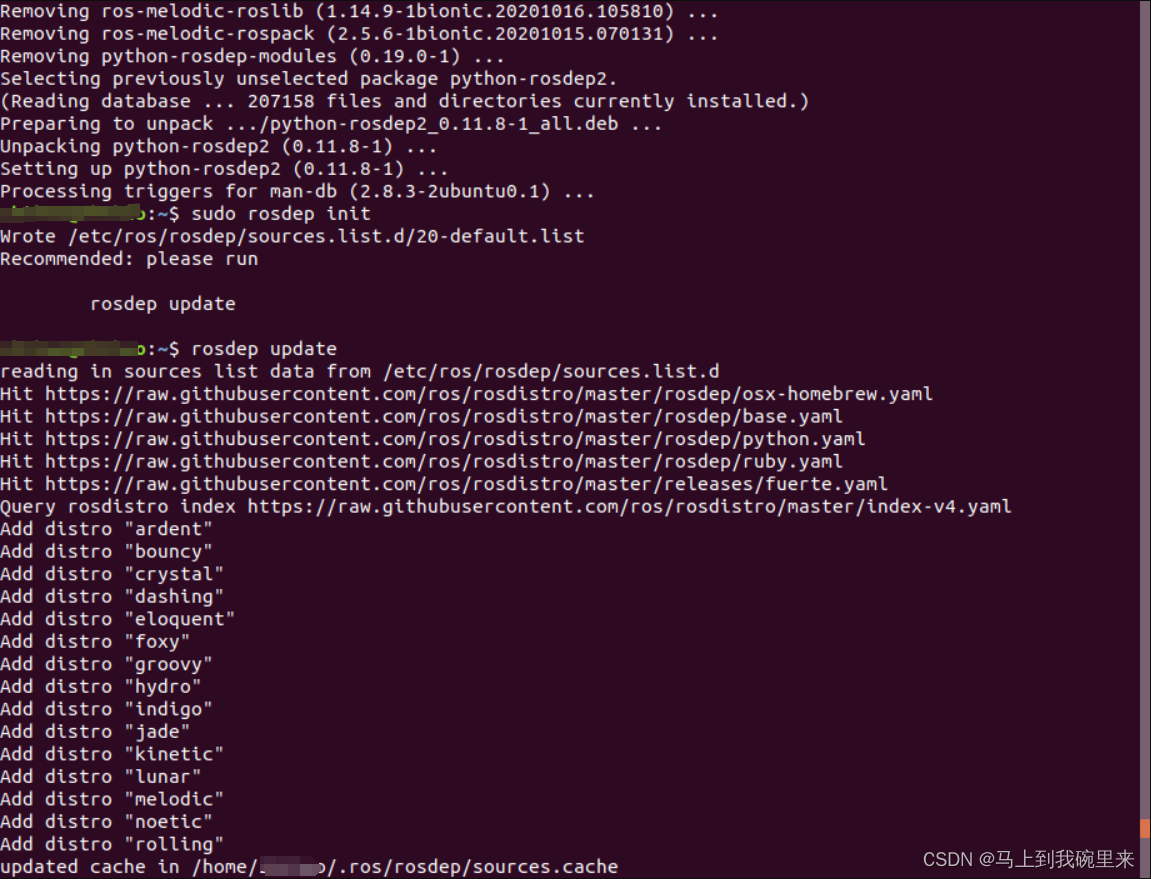
当显示rosdep update就基本成功了,接下来:
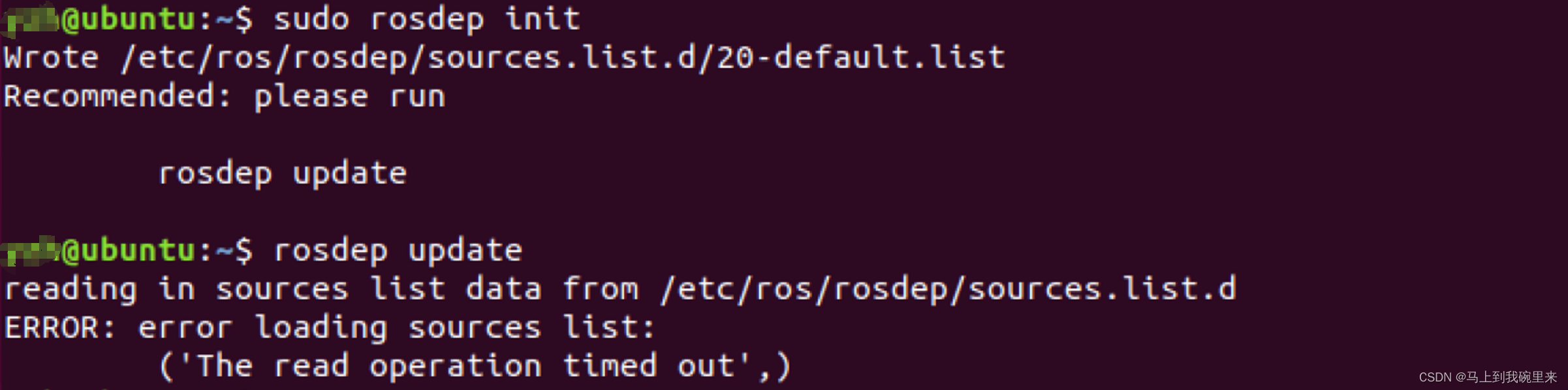
这个错误就是网络问题造成的,理论上换成手机热点就可以。但还是要多试几次。
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

