
热门标签
热门文章
- 1python 爬虫爬取地理空间高程图GDEMV2 30m 中国地形
- 2c++课程设计(学生课程学分信息管理)_(1)能从键盘输入某位学生的信息(不包含学分)。(2)给定学号,显示该学生的所完
- 3已解决ERROR: pip’s dependency resolver does not currently take into account all the packages异常的正确解决方法,亲_pip's dependency resolver does not currently take
- 4python编程自动化实例_Python自动化开发学习8
- 5ffmpeg 提取视频文件关键帧
- 6【QT入门】VS qt和QtCreator项目的相互转换
- 720道常见的kafka面试题以及答案_kafka运维面试问题
- 8Zabbix 3.4过滤多余的windows网卡监控
- 9jieba分词浅析---关键词提取_jieba关键词提取
- 10【JS 逆向百例】吾爱破解2022春节解题领红包之番外篇 Web 中级题解
当前位置: article > 正文
Voxel Map for Visual SLAM(ICRA2020)_voxelmap slam
作者:AllinToyou | 2024-03-13 14:24:22
赞
踩
voxelmap slam
文中提到,使用slam中传统的关键帧技术有时候并不是最优的,比如纹理少、没有结构信息,
特别是有遮挡的情况等等。。。
A. Voxel hashing data structure
存储地图点使用的是hash表,首先将地图分割成voxel,然后每个voxel中都存放很多的3dpoint,同时3dpoint中携带feature信息(descritor or 2d detector)
结合体素表示和hash方法,我们可以在恒定时间内得到给定区域(如摄像机视锥)内的点,而不必考虑地图大小。
hash function(就是一个hash映射函数,输入是xyz坐标输出是对应的point3d的列表):

注!!!!这里所说的结构化指的就是体素表达地图
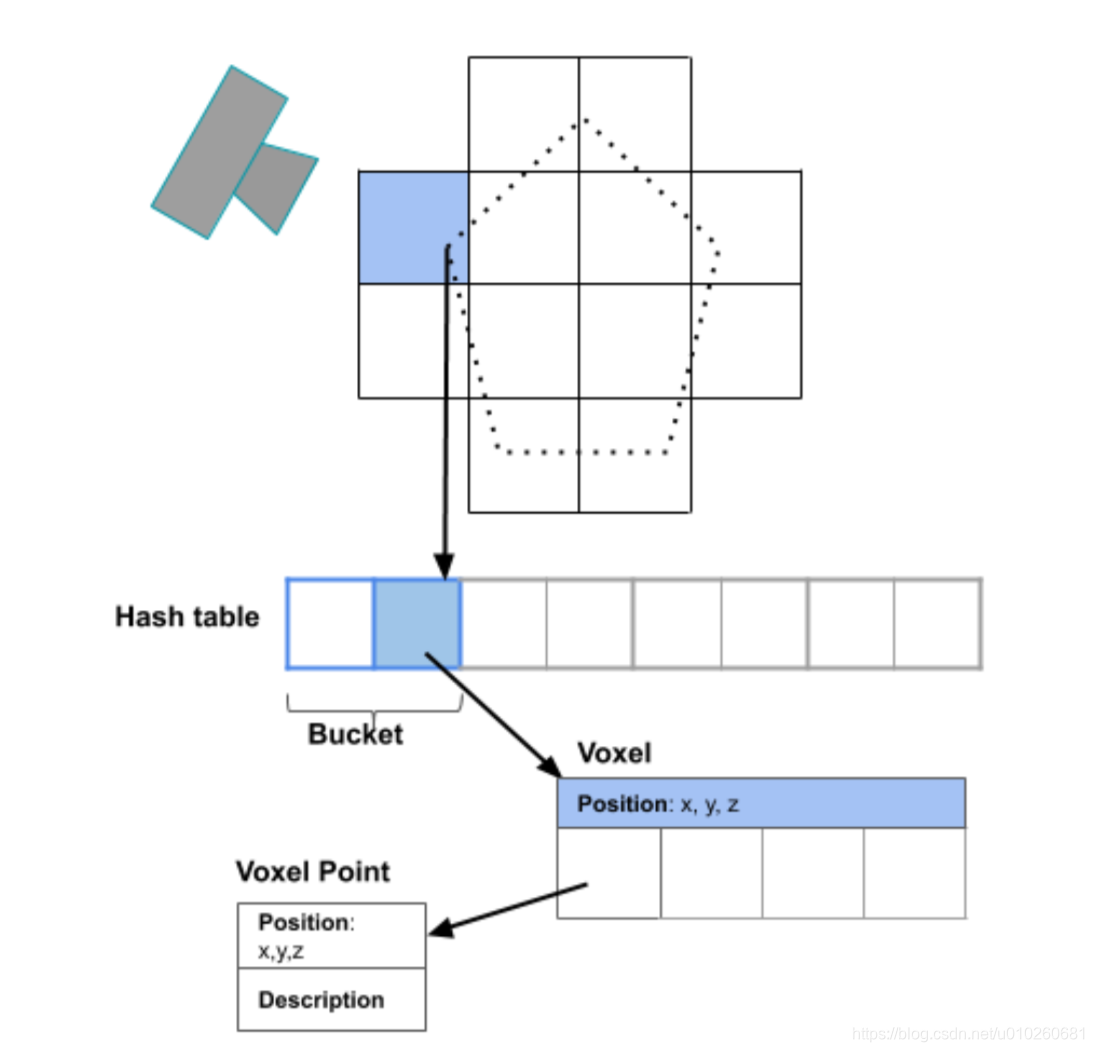
注!!!蓝色的就是camera看到的3d 点
使用voxel需要注意:
1.
Voxel size
voxel的大小很影响性能,极端情况只有一个voxel或者voxel的大小等于point的大小,则voxel就没有用了
2.Resolving collisions
使用buckets 解决冲突问题
B. SLAM map management with voxels
通常,SLAM中的地图存储三维几何对象,如点和线,新的帧可以根据这些对象进行局部化。地图会随着时间的推移而更新(例如,添加/删除点,更新现有点的信息),并且应该在跟踪过程中支持高效的查询(例如,新图像中可能匹配的点是什么?)。下面,我们将描述体素映射中的相应功能。请注意,我们不会完全丢弃关键帧,因为基于关键帧的BA对于优化贴图仍然是必要的。我们的体素地图是一个更有效的三维点组织,以促进数据关联。
Insert point:
首先使用hash函数找到bucket,然后分为三种情况:1. Voxel存在,point3d不存在,则直接插入。2.voxel存在;point3d存在(比如相近point3d 1cm有点),则更新feature。 3. voxel不存在,则插入新的voxel
Delete point:
和inert 近似
Query map
:
和inser近似,直接通过hash找到相邻的所有的point3d
C. Point query with raycasting
在slam中一个重要的function是在tracking的时候得到当前帧可能观测到的所有的3d点,因此我们可以使用观测fov对voxel进行采样,快速获得3d点(因为是tracking,因此是有pose先验的)
1. 我们首先从图像平面上的规则网格中采样像素。然后我们将这些采样像素投影到三维空间中的方向向量上,得到r射线{Ri}Ri=1。这些光线基本上对摄像机视场进行采样。请注意,光线是在摄影机帧中表示的。
2. 然后均匀的在射线上进行采样
3. 根据tracking或者imu先验,可以将上述采样点转换到世界坐标系下,最后使用hash得到所有观测的3d点

优点:1. 使用体素的方法替代关键帧的方法进行tracking的时候的关联,避免了遮挡造成的干扰
2. query时间恒定
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/228985
推荐阅读
相关标签

