
- 1web蓝桥杯真题:分阵营,比高低
- 2java minio通过getPresignedObjectUrl设置(自定义)预签名URL下载文件的响应文件名之minio源码改造方案
- 3liteos任务(二)
- 4解决异常 java.net.URISyntaxException: Illegal character in query at index
- 5超详细的深度学习基础_神经网络发展史俗称三起两落其中不属于三起的时间是
- 6更好用!银河麒麟桌面操作系统(教育版)V10全新升级_麒麟 2303 qt
- 7在安卓系统上使用linux还自带vscode???(强推平板)_android vscode
- 8推荐一些视觉SLAM的深度学习方法(下)_gan slam
- 9超干货!一文概览 NLP 算法
- 10uniapp原生插件 - android原生插件打包流程 ( 避坑指南一)_uniapp 原生插件怎么打包成插件
Isaac Sim教程02 Isaac Sim的安装与环境配置_nvidia isaac sim
赞
踩
Isaac Sim 安装与环境配置
版权信息
Copyright 2023 Herman Ye@Auromix. All rights reserved. This course and all of its associated content, including but not limited to text, images, videos, and any other materials, are protected by copyright law. The author holds all rights to this course and its contents. Any unauthorized use, reproduction, distribution, or modification of this course or its contents is strictly prohibited and may result in legal action. This includes, but is not limited to: Copying or distributing course materials without express written permission. Reposting, sharing, or distributing course content on any platform without proper attribution and permission. Creating derivative works based on this course without permission. Permissions and Inquiries If you wish to use or reproduce any part of this course for purposes other than personal learning, please contact the author to request permission. The course content is provided for educational purposes, and the author makes no warranties or representations regarding the accuracy, completeness, or suitability of the course content for any specific purpose. The author shall not be held liable for any damages, losses, or other consequences resulting from the use or misuse of this course. Please be aware that this course may contain materials or images obtained from third-party sources. The author and course creator diligently endeavor to ensure that these materials are used in full compliance with copyright and fair use regulations. If you have concerns about any specific content in this regard, please contact the author for clarification or resolution. By enrolling in this course, you agree to abide by the terms and conditions outlined in this copyright notice.

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
学习目标
- 熟悉Isaac Sim的安装
- 熟悉Isaac Sim的环境配置
难度级别
| 初级 | 中级 | 高级 |
|---|---|---|
| √ |
预计耗时
20 mins
学习前提
| 对象 | 类型 | 状态 |
|---|---|---|
| Isaac Sim基本概念 | 知识 | 已了解 |
| Ubuntu22.04操作系统 | 软件 | 已确认 |
提示:
以下配置步骤为工作站、个人电脑的配置方式,对于云端或Docker部署,可参考本章的云端部署部分或Isaac官方关于Docker的部署说明。
配置Omniverse环境
1.下载omniverse
Isaac Sim是依托于NVIDIA Omniverse平台的仿真工具包,前往Nvidia Isaac Sim官网下载Omniverse。
NVIDIA Omniverse™ Isaac Sim是NVIDIA Omniverse™平台的一款机器人仿真工具包。Isaac Sim具备构建虚拟机器人世界和实验的关键功能。它为研究人员和从业人员提供了创建健壮、物理精确仿真和合成数据集所需的工具和工作流程。Isaac Sim通过ROS/ROS2支持导航和操控应用。它可以模拟RGB-D、Lidar和IMU等传感器的传感器数据,用于多种计算机视觉技术,如领域随机化、真值标签、分割和边界框。
根据以下步骤下载对应的omniverse-launcher-linux.AppImage文件。



2.启动Omniverse
替换掉<your_omniverse_appimage>为你下载的omniverse版本,通常名为omniverse-launcher-linux.AppImage
# Grant executable permissions
sudo chmod +x <your_omniverse_appimage>
- 1
- 2
例:
# Grant executable permissions
sudo chmod +x omniverse-launcher-linux.AppImage
- 1
- 2
在没有安装FUSE时可能无法启动appimage,因此先安装FUSE
# Install fuse
sudo apt install fuse -y
- 1
- 2
通过命令行启动Omniverse,也可手动双击启动
# Run Omniverse
./<your_omniverse_appimage>
- 1
- 2
具体的命令行可参考:
./omniverse-launcher-linux.AppImage
- 1

3.登录Nvidia账号
登录你的Nvidia账号,按照引导,默认即可,进入Omniverse主页面
配置Isaac Sim环境
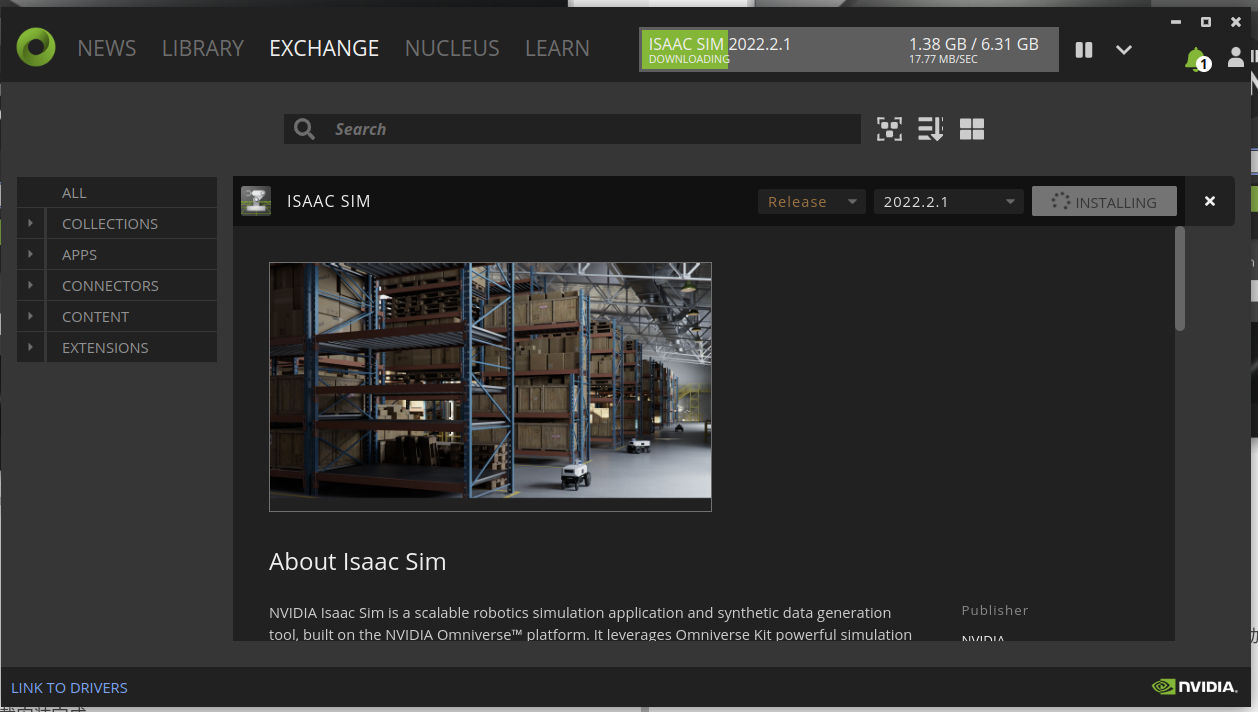
4.安装ISAAC SIM
进入Omniverse的EXCHANGE页面,选择ISAAC SIM,点击install,等待自动下载安装完成
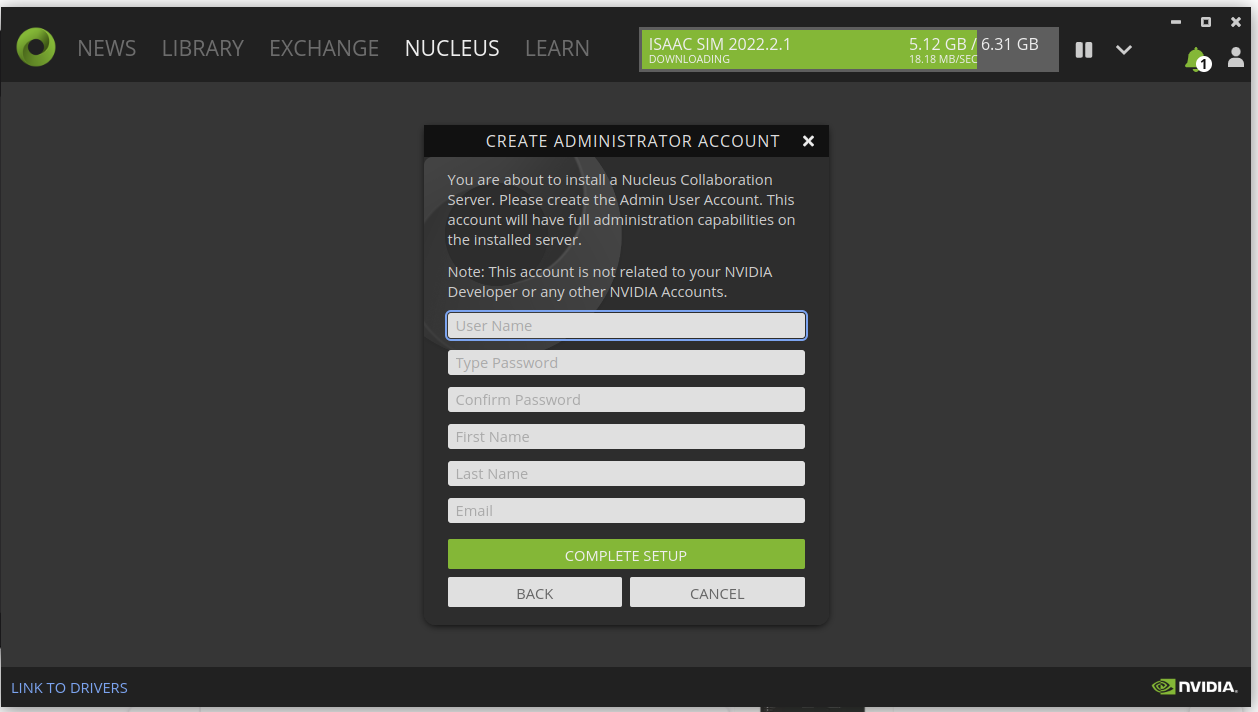
5.安装NUCLEUS
Omniverse Isaac Sim使用NVIDIA Omniverse™ Nucleus来访问环境和机器人的USD文件等内容。Omniverse Nucleus服务允许各种客户端应用程序、渲染器和微服务在Omniverse Isaac Sim中共享和修改虚拟世界的表示。
Nucleus采用发布/订阅模型。在访问控制的前提下,Omniverse客户端可以将数字资产和虚拟世界的修改发布到Nucleus数据库(DB),或订阅其变化。更改在连接的应用程序之间实时传输。数字资产可以包括描述虚拟世界及其随时间演变的几何形状、灯光、材料、纹理和其他数据。
这使得各种Omniverse-enabled客户端应用程序(Apps, Connectors等)能够共享和修改虚拟世界的权威表示。
简而言之,NUCLEUS可以被简单理解为一个管理虚拟资产的文件管理器。
进入NUCLEUS页面,点击Add Local Nucleus Device,创建管理员账号
点击COMPLETE SETUP,等待下载并设置完成
启动Isaac Sim仿真
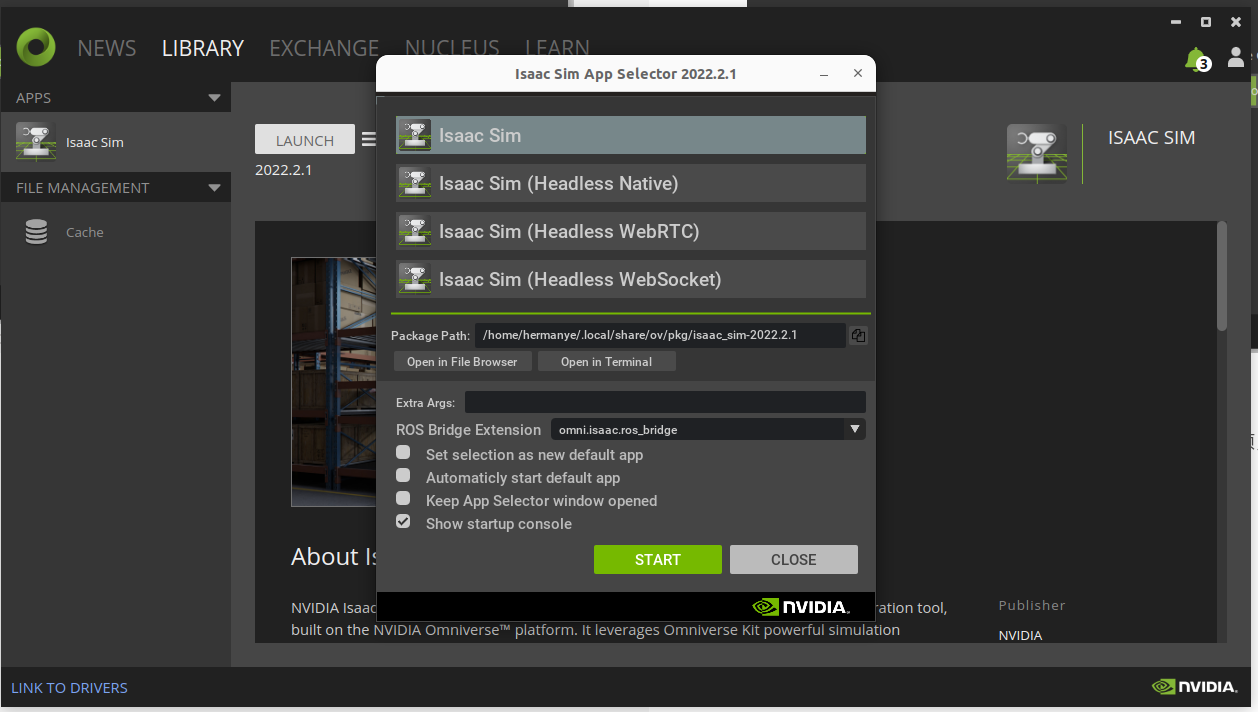
6.启动ISAAC SIM
在LIBRARY中找到ISAAC SIM,点击Launch启动,按照默认选项,点击START继续启动
过程中可能会遇到一些依赖安装、光追编译、加载等情况,根据个人电脑性能情况速度不同,等待即可
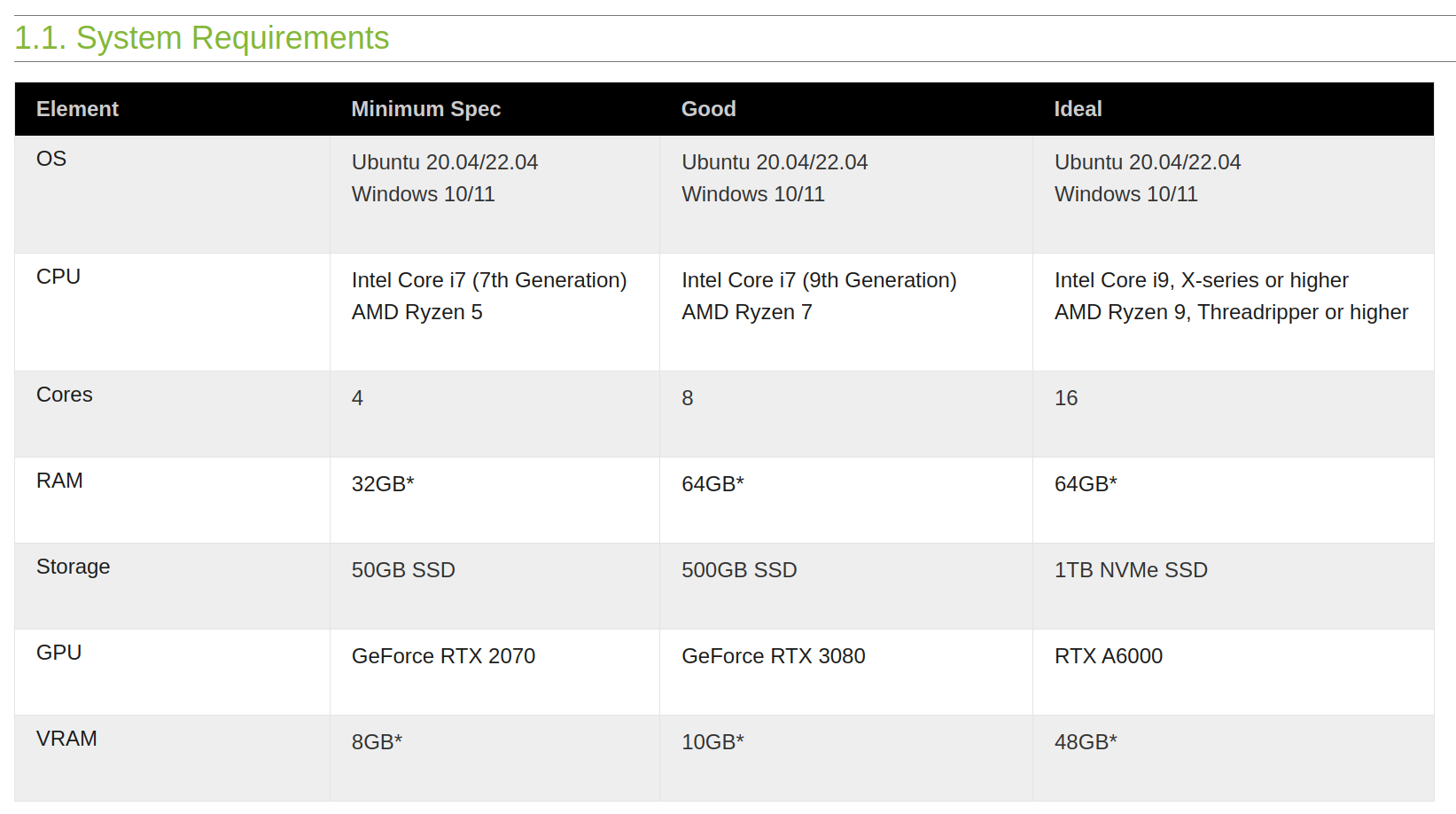
提示: ISAAC SIM 对于个人计算机性能要求比较苛刻,因此个人建议最低配置表如下:
| 硬件 | 参数 |
|---|---|
| 内存 | 32 GB |
| 存储 | 1 T |
| 显存 | 8 G |
具体的ISAAC SIM性能要求可参考Nvidia Isaac Sim Documentation System Requirements
7.观察ISAAC SIM主界面
在成功启动并完成编译、配置等过程后,Isaac Sim的空主界面应当为如下状态:

8.下载Isaac资产包(可选的)
为方便本地使用USD资产素材,在Omniverse->EXCHANGE中搜索isaac sim assets pack,下载三个资产包。

将下载好的三个素材包(素材包1、2、3)合并到素材包1
# Copy package 3 to package 1
cp -v -r ~/Downloads/isaac_sim-assets-3-2023.1.0/Assets/Isaac/2023.1.0/NVIDIA/* ~/Downloads/isaac_sim-assets-1-2023.1.0/Assets/Isaac/2023.1.0/NVIDIA/
# Copy package 2 to package 1
cp -v -r ~/Downloads/isaac_sim-assets-2-2023.1.0/Assets/Isaac/2023.1.0/NVIDIA/* ~/Downloads/isaac_sim-assets-1-2023.1.0/Assets/Isaac/2023.1.0/NVIDIA/
# Go to assets parent directory
cd ~/Downloads/isaac_sim-assets-1-2023.1.0/Assets/Isaac/2023.1.0/NVIDIA
- 1
- 2
- 3
- 4
- 5
- 6

将资产包文件夹上传到 Nucleus 服务器
依次点击NUCLEUS->New Folder->CREATE来创建名为NVIDIA的文件夹

将~/Downloads/isaac_sim-assets-1-2023.1.0目录下的Assets文件夹拖动到Nucleus的localhost/Library/NVIDIA里,或者右键添加文件夹到该位置。 由于资产文件夹较大,上传时间可能比较长。

提示:
如果卡顿在上传步骤,可以尝试在左侧的My Computer/Downloads/isaac_sim-assets-1-2023.1.0 目录中复制对应的Assets文件夹到localhost/Library/NVIDIA

设置工作站Isaac Sim包的环境变量,工作站包的根文件夹位于~/.local/share/ov/pkg/isaac_sim-2023.1.0-hotfix.1。
# Set environment variable for isaac package quick visit
echo "ISAAC SIM ENV VISIT SETTINGS"
echo "export isaacrepo=~/.local/share/ov/pkg/isaac_sim-2023.1.0-hotfix.1" >> ~/.bashrc
# Check environment variable
source ~/.bashrc
echo $isaacrepo
# Go to isaac sim package directory
cd $isaacrepo
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8

来到Isaac Sim的目录下,附带路径设置,运行Isaac Sim,Isaac Sim默认记忆上次的路径设置,因此只需要尝试运行一次,之后都会默认资产是这个路径
# Go to your isaac sim directory
cd $isaacrepo
# Run isaac sim with path settings
./isaac-sim.sh --/persistent/isaac/asset_root/default="omniverse://localhost/Library/NVIDIA/Assets/Isaac/2023.1.0"
- 1
- 2
- 3
- 4
在GUI界面验证资源的布局和路径,请转到Isaac Utils -> Nucleus Check

应该会返回如下结果,说明设置成功:
[139.213s] Checking for Isaac Sim assets… [139.218s] Isaac Sim
assets found: omniverse://localhost/Library/NVIDIA/Assets/Isaac/2023.1.0
通过将资产部署到Nucleus的服务器上,可以实现不同成员间的资产协作,同时可以在GUI左下角的Content中方便地显示资产缩略图。
云端部署(可选的)
注意:
以上安装及配置步骤是适用于工作站的,如果需要在云上部署,请参考Isaac Sim的云端部署。
相关资料
Nvidia Omniverse Isaac Sim Documentation
Isaac Sim ROS2 tutorial
How to use Isaac Sim with your own robot?


