
热门标签
热门文章
- 1会议论文出版社、出版地、引用格式_ijcai出版商地址
- 2vulnhub靶场之driftingblues-2
- 3Python数据分析中文本分析的重要技术点,包括文本预处理、特征提取、情感分析_python文本分析
- 4OpenHarmony软总线总体功能简要介绍
- 5下载wp-config.php,wp-config.php
- 6【MindStudio训练营第一期】垃圾分类案例代码详解_aclliteresource
- 7linux 线程同步(二)_linux之线程同步二头歌
- 8Transformer详解(附代码)_transformer模型代码
- 9预训练模型与传统方法在排序上有啥不同?
- 10AIGC创作系统ChatGPT源码,支持最新GPT-4-Turbo模型,支持DALL-E3文生图_gpt4 turbo 国内使用
当前位置: article > 正文
多水下机器人协同定位_水下多机协同
作者:AllinToyou | 2024-04-05 06:46:31
赞
踩
水下多机协同
多AUV协同定位研究单位有约翰霍普金斯大学,近年来发布的文章均关于当AUV无DVL时的协同定位技术;
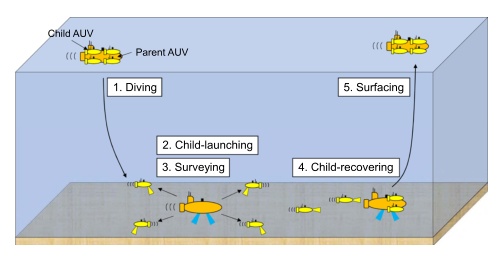
还有东京大学Takumi Matsuda,有一套关于主从AUV的合体展望(如图所示)
通过Tri‐TON 2 AUV 与改装后的BlueROV 使用粒子滤波来进行协同定位。
国内的研究单位主要有哈工程与西工大,以徐博老师与张立川老师为代表,基本验证均是仿真验证,参考数据大致是前几年海试或湖试的数据。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/364013
推荐阅读

相关标签

