
热门标签
热门文章
- 1【面试经】数据分析 or 数据开发面试必备思路,面试官都会这样问。_数据开发岗位面试
- 2零基础转行Linux云计算运维工程师获得20万年薪的超级学习技巧_linux云计算运维工程师培训教程
- 3AI视频教程下载:使用ChatGPT进行市场营销
- 416行python画朵玫瑰_python画很多束玫瑰
- 5电销机器人电话机器人系统部署freeswich安装
- 6为什么很多企业会需要IT人才外包?_计算机为什么会产生外包人员这个形式
- 7FPGA block RAM和distributed RAM区别(以及xilinx 7系列CLB资源)
- 8elasticsearch查询操作(语句方式)_es模糊查询语句_elasticsearch 模糊查询
- 9Window安装并配置Mysql_windows mysql 配置文件
- 10python——飞机大战游戏(下载模块,知识点,图片)_python 飞机大战
当前位置: article > 正文
编译与Rviz可视化_rviz文件怎么生成
作者:AllinToyou | 2024-05-25 20:30:09
赞
踩
rviz文件怎么生成
一、编译URDF文件
(1)创建工作空间【ur5e_package1】;
(2)在工作空间内创建【src】,并将urdf文件包【ur5e】放置在【src】中;
(3)在【ur5e_package1】终端下编译文件,输入指令catkin_make
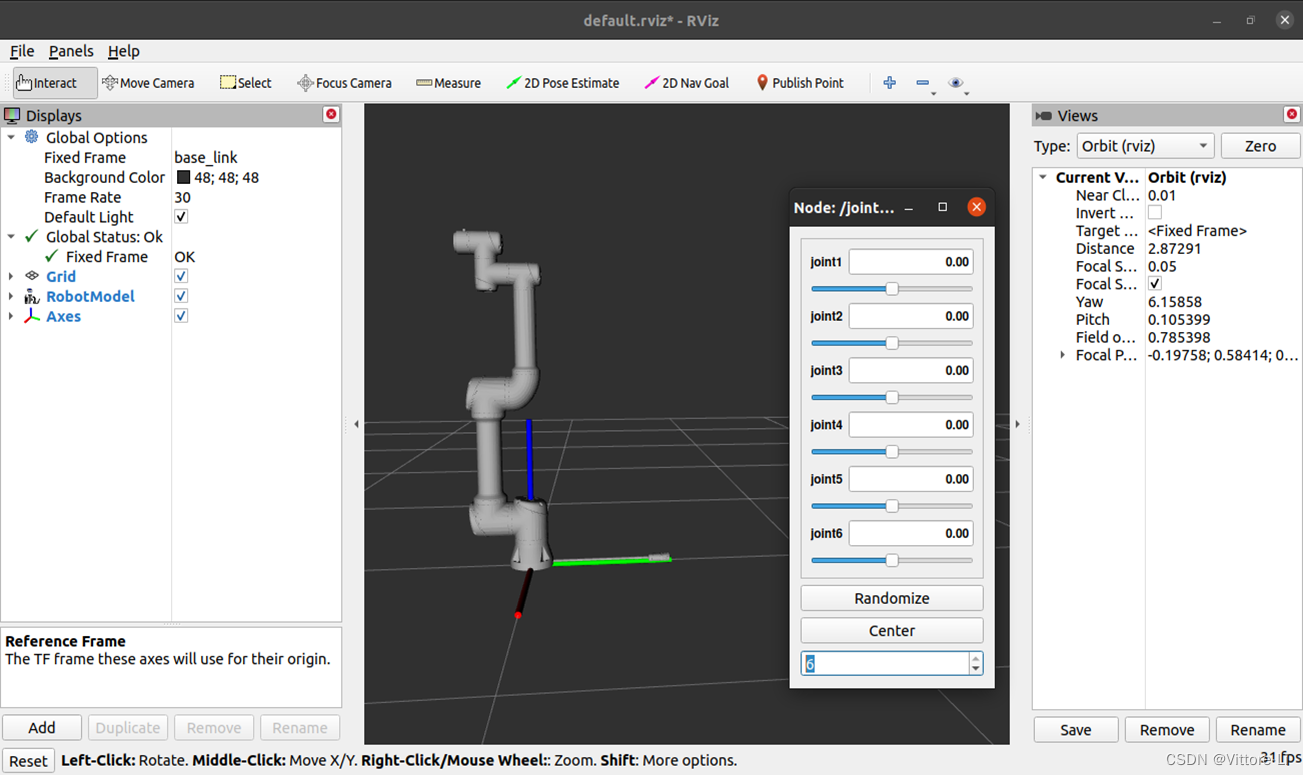
二、Rviz可视化
启动launch文件
(1)在【ur5e_package1】终端下配置环境,输入指令source devel/setup.bash
(2)继续在此环境下输入指令roslaunch+urdf文件包名+display.launch
#---------------------------------------------------------------------------------------------------------------
source devel/setup.bash
roslaunch ur5e display.launch
#---------------------------------------------------------------------------------------------------------------
(3)此时Global Status报错,Fixed Frame选择基座(这里是base_link)而非map,报错解除
(4)此时界面没有模型显示,点击添加,选择RobotModel显示模型
(5)保存文件,命名为urdf.rviz
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/623662
推荐阅读
相关标签

