
- 1在 M1/M2 Mac 上,让 Windows 11 免费“跑”起来!_mac m2 win11arm usb
- 2业务中台构建策略:划分子域、上下文、事件风暴、需求结构化和能力可配置...
- 3移动端开发--物理像素和逻辑像素_在javascript中,可以使用window.devicepixelratio属性来获取设备的像素
- 4基于Web旅游网站的设计与实现 毕业设计开题报告_web前端旅游网站的课题介绍
- 5无序数组中找到左侧比他小右侧比他大的数_无序数组中寻找一个数,左值比它小,右值比它大
- 6设计模式之工厂模式_设计模式工厂模式
- 7Bytecode Outline plugin 一个很有用的eclipse插件
- 8端口映射和端口转发的区别(一个菜比的理解)_端口转发和端口映射的区别
- 9Python读写csv文件_csv.reader
- 10交易系统开发(四)——交易柜台系统
Canny算子-检测边界_canny算子的三个准则
赞
踩
原理
- Canny Edge detector 在1986年提出,此算法主要满足以下三个准则:
- Low error rate: 尽可能多地检测真实的边缘
- Good localization:检测出的边缘像素点和实际边缘像素点的距离尽可能的小
- Minimal response:图像中的任意边缘应该只被标记一次,同时图像噪声不应产生伪边缘
- 算法步骤
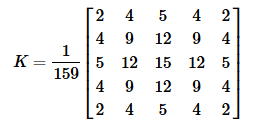
- 使用高斯滤波器进行滤波,如:
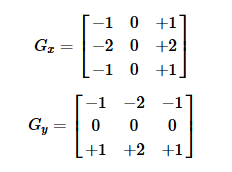
- 计算图像强度的梯度和方向,和Sobel算子类似:
a. 分别使用 x , y x,y x,y两个方向的卷积核进行处理:
b. 计算梯度 G G G 和方向 θ \theta θ:
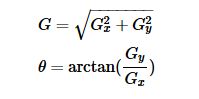
把 θ \theta θ 近似到四个方向,分别代表水平,垂直和两个对角线方向(0°,45°,90°,135°)
- 非极大值抑制
非极大值抑制是一种边缘稀疏技术,通常得出来的梯度边缘不止一个像素宽,而是多个像素宽。非最大值抑制能帮助保留局部最大梯度而抑制所有其他梯度值。这意味着只保留了梯度变化中最大的位置,其他都为0。算法如下:
a. 将当前的梯度与正负梯度方向的两个像素的梯度G1、G2进行比较
b. 如果当前像素的梯度强度与另外两个像素相比最大,则该像素点保留为边缘点,否则该像素点将被抑制;比如当前点的梯度方向指向正上方90°方向,那它需要和垂直方向的正上方和正下方的像素的梯度进行比较。
伪代码:
if G>G1 && G>G2
G may be edge
else
G should be suppressed
- 1
- 2
- 3
- 4
- 双阈值检测
在施加非极大值抑制之后,剩余的像素可以更准确地表示图像中的实际边缘。然而,仍然存在由于噪声和颜色变化引起的一些边缘像素。为了解决这些杂散响应,Canny算法应用双阀值,即一个高阀值和一个低阀值来区分边缘像素。如果边缘像素点梯度值大于高阀值,则被认为是强边缘点。如果边缘梯度值小于高阀值,大于低阀值,则标记为弱边缘点。小于低阀值的点则被抑制掉。
官方建议:upper:lower ratio between 2:1 and 3:1.
伪代码:
if G>HighThreshold
G is a strong edge
else if G>= LowThreshold
G is a weak edge
else
G should be suppressed
- 1
- 2
- 3
- 4
- 5
- 6
- 抑制孤立 Weak edge
至此,我们已经将强边缘视为真实的边缘,但是对于弱边缘,可以从真实边缘提取也可以是因噪声或颜色变化引起的。所以对于噪声引起的弱边缘,我们应该抑制。通常,由真实边缘引起的弱边缘像素将连接到强边缘像素,而噪声响应未连接。为了跟踪边缘连接,通过查看弱边缘像素及其8个邻域像素,只要其中一个为强边缘像素,则该弱边缘点就可以保留为真实的边缘。
伪代码:
if G is weak edge && connected to strong edge
G is a real edge
else
G should be suppressed
- 1
- 2
- 3
- 4
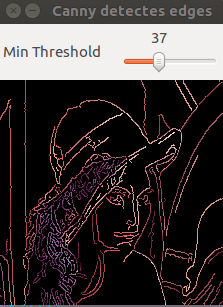
官方例子
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace std; Mat src,src_gray; Mat dst,detected_edges; int lowThreshold = 0; const int kernel_size = 3; const int max_lowThreshold = 100; const char* window_name = "Canny detectes edges"; static void CannyThreshold(int, void*) { blur(src_gray,detected_edges,Size(3,3)); Canny(detected_edges,detected_edges,lowThreshold,lowThreshold*3,kernel_size); //高阈值是低阈值的3倍 dst = Scalar::all(0); src.copyTo(dst,detected_edges); //detected_edges是Canny算子检测的结果,作为mask,将src复制给dst imshow(window_name,dst); } int main(void) { src = imread("../res/lena.jpeg",cv::IMREAD_COLOR); if(src.empty()) { cout << "can't load image" << endl; } dst.create(src.size(),src.type()); cv::cvtColor(src,src_gray,cv::COLOR_BGR2GRAY); namedWindow(window_name, cv::WINDOW_AUTOSIZE); createTrackbar("Min Threshold",window_name,&lowThreshold,max_lowThreshold,CannyThreshold); CannyThreshold(0,0); waitKey(0); return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
结果:
OpenCV API
void cv::Canny
(
InputArray image, // 8-bit input image
OutputArray edges, // 输出edge图,和输入一样,单通道 8bits 图
double threshold1, // lowThreshold
double threshold2, // highThreshold
int apertureSize = 3, // 定义调用Sobel核大小
bool L2gradient = false // 计算梯度方式,
L
2
L_2
L2是精确的,
L
1
L_1
L1是近似
)


输入的是:分别对图像x ,y 的导数的结果
void cv::Canny
(
InputArray dx, // 16-bit x derivative of input image (CV_16SC1 or CV_16SC3).
InputArray dy, // 16-bit y derivative of input image (same type as dx).
OutputArray edges, // single channels 8-bit image, which has the same size as input .
double threshold1, // lowThreshold
double threshold2, // highThreshold
bool L2gradient = false // 和上面一样
)

