
热门标签
热门文章
- 12021国赛数据处理_乙醇偶合制备c4烯烃数学建模论文
- 2Unity光照渲染设置_unity渲染设置在哪
- 3【Transformer系列(4)】Transformer模型结构超详细解读_transformer结构
- 4万字讲解9种Web应用攻击与防护安全。XSS、CSRF、SQL注入等是如何实现的
- 5使用 PyTorch 构建 NLP 聊天机器人_使用pytorch搭建聊天机器人模型
- 6flutter Got socket error trying to find package nested at
- 7Android 和 iOS 漏洞加剧移动安全的威胁_cwe漏洞安卓
- 8python(8)---- pyltp5个核心函数_python pyltp包里的函数
- 9langchain+chatglm阅读理解天龙八部_langchain 直接调用chatglm回答,不构造本地知识库
- 10玩客云改造HP2130打印机服务器_刷打印服务器
当前位置: article > 正文
关于viewer窗口的显示说明_viewer->addpointcloud
作者:Cpp五条 | 2024-04-09 17:33:43
赞
踩
viewer->addpointcloud
显示点云的方法有两种,不过本人更倾向第一种,
理由是:
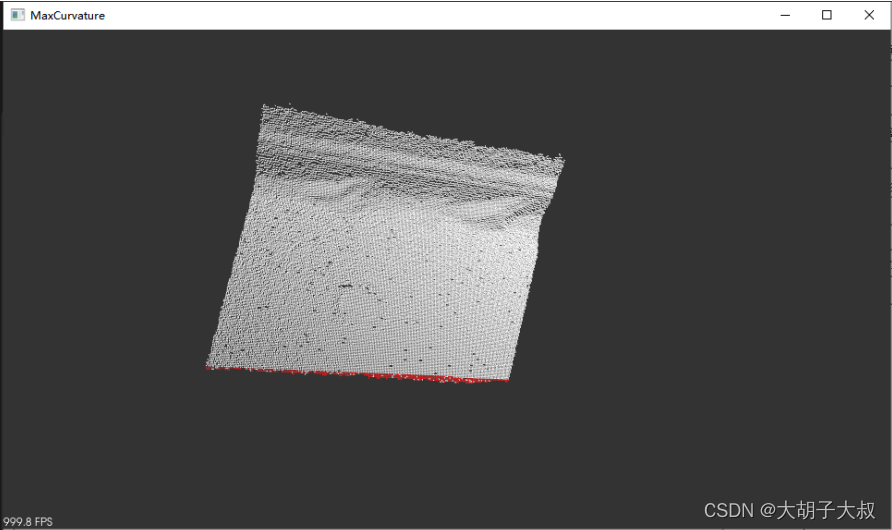
1、第一个方法中的点云支持鼠标滚动放大对点云的显示
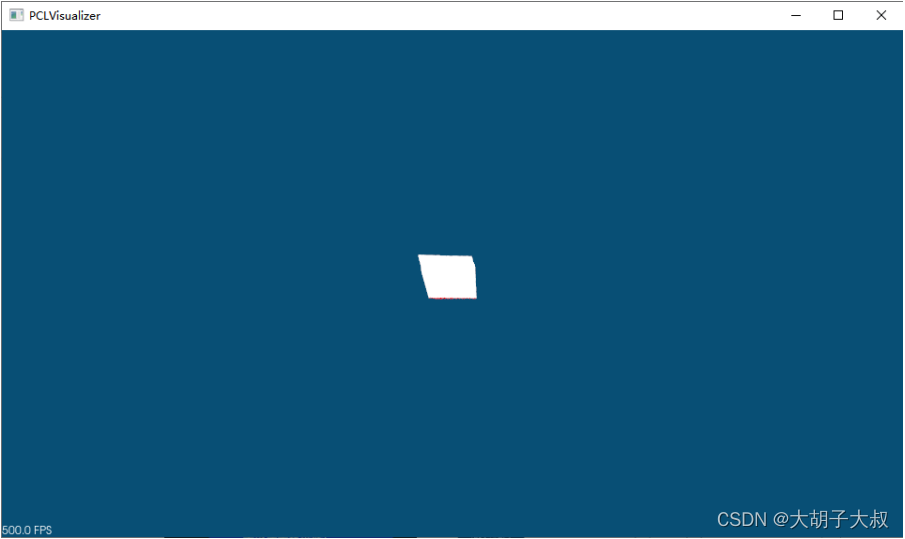
2、方法二种的显示效果见图2,想放大看细节看不了
方法一
- //可视化窗口
- boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer
- (new pcl::visualization::PCLVisualizer("MaxCurvature"));
- viewer->addCoordinateSystem(0.2); // 读取的点云单位是什么,这个单位就是什么
- viewer->setBackgroundColor(0.2, 0.2, 0.2);
-
- viewer->addPointCloud<pcl::PointXYZ>(cloud, "cloud");
- pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> color(cloud_MaxCurvature, 255, 0, 0);
- viewer->addPointCloud<pcl::PointXYZ>(cloud_MaxCurvature, color, "cloud_MaxCurvature");
-
- //将得到的结果保存出来
- pcl::io::savePCDFileASCII("qulv.pcd", *cloud_MaxCurvature);
- //窗口中添加文字
- //viewer->addText("table", 180, 180);
-
- viewer->spin();

方法一显示的点云
方法二
- pcl::visualization::PCLVisualizer viewer("PCLVisualizer");
- viewer.initCameraParameters();
- viewer.setBackgroundColor(8.0 / 255.0, 79.0 / 255.0, 117.0 / 255.0);
- viewer.addPointCloud<pcl::PointXYZ>(cloud, "cloud");
- pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> color(cloud_MaxCurvature, 255, 0, 0);
- viewer.addPointCloud<pcl::PointXYZ>(cloud_MaxCurvature, color, "cloud_MaxCurvature");
-
- //将得到的结果保存出来
- pcl::io::savePCDFileASCII("qulv.pcd", *cloud_MaxCurvature);
-
- while (!viewer.wasStopped())
- {
- viewer.spinOnce(100);
- boost::this_thread::sleep(boost::posix_time::microseconds(100000));
- }
方法二显示的点云
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

