
热门标签
热门文章
- 1手把手带你玩转Spark机器学习-使用Spark构建回归模型_spark线性回归 可视化
- 22024年(第十届)全国大学生统计建模大赛选题参考(二)_统计建模选题
- 3Python中列表的基本操作
- 4Mac OS X 10.10 Yosemite 关闭Dashboard和Spotlight_spotlightv100能删除吗
- 5产品经理 | 职业选择及面试技巧_产品经理面试职业规划
- 6【JAVA】 Java 性能比较差的代码写法及替换方案_java stream int 假发
- 7复刻yolo系列时出现的BUG及解决方法_runtimeerror: "slow_conv2d_cpu" not implemented fo
- 8XZ-Utils后门事件过程及启示_xzuntil
- 9HarmonyOS实战开发-拼图、如何实现获取图片,以及图片裁剪分割的功能。_鸿蒙 分割图片
- 10三款好用的 Docker 可视化管理工具_docker可视化界面管理工具
当前位置: article > 正文
ROS主从机时间同步_ros时间同步
作者:Cpp五条 | 2024-05-05 19:44:24
赞
踩
ros时间同步
多机时间同步设置
在多机编队这一项目中,多机时间同步设置是至关重要的一步。编队的过程中,由于各机器人的系统时间不同步会带来很多问题。多机时间同步分为两种情况,分别为主从机器人均联网和均断网的情形。
1 主从机联网的情况
在完成多机通信后,若主从机都能成功连接上网络,则它们会实现自动同步网络时间,这个时候不需要再进行其他操作就已经实现了时间同步。
2 主从机断网的情况
在完成多机通信后,若主从机均无法成功连接上网络,此时需要手动同步时间。在这里我们使用 date 命令完成时间设置。先安装 terminator 工具,通过 terminator 工具将主从机的控制终端使用窗口分割工具(单击右键设置分割窗口,在不同窗口分别 ssh 登录主从机)安置于同一个终端中。
sudo apt-get install terminator # 下载 terminator 工具分割
- 1
终端窗口点击左上方的按钮,选择[广播到所有]/[Broadcast all]这一选项,输入以下命令,利用 terminator 工具在同一时间给主从机设置时间来完成时间同步。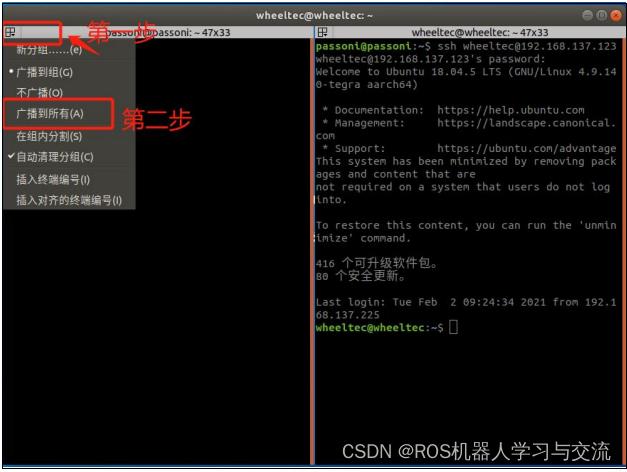 图 14-3-1 广播输入指令操作步骤
图 14-3-1 广播输入指令操作步骤
sudo date -s “2022-01-30 15:15:00” # 手动设置时间
推荐阅读
相关标签

