
- 1Spring Boot 2.x实战85 - Spring Security 9 - OAuth 2.0之Client_spring-boot-starter-oauth2-client
- 2如何允许网页中的编辑器访问剪切板_Vditor下一代的 Markdown 编辑器,为未来而构建...
- 3Javaweb——Spring Boot 系列(17)数据批量入库_springbatch批量入库
- 4【burpsuite安全练兵场-客户端14】点击劫持-5个实验(全)_点击劫持实战
- 5【OceanBase诊断调优】—— Unit 迁移问题的排查方法
- 6SpringBoot源码解读与原理分析
- 7微信小程序开发工具无法加载项目代码 显示无法访问此网站_微信开发者工具无法访问此网站
- 8Springboot+Vue项目-基于Java+MySQL的毕业就业信息管理系统(附源码+演示视频+LW)
- 9【数据结构 —— 一文看懂哈希表】_哈希表随机数法
- 10pycharm中无法加载出来已经配置好的conda环境
Livox-avia+FAST-LIO麻瓜使用教程_avia算法测试
赞
踩
Livox-avia+FAST-LIO算法安装及使用流程
一、版本号
Ubuntu Version:Ubuntu 20.04.6 LTS
PCL Version:1.10.0
Eigen Version:3.3.4
ROS:noetic
Fast-LIO & Livox-SDK:当前仓库中最新的即可
- 安装流程
- 安装ROS
ROS (Robot Operating System)软件源添加到Ubuntu系统:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置ROS公钥:
sudo apt install curl # if you haven't already installed curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
更新索引:
sudo apt update
安装ROS完整版:
sudo apt install ros-noetic-desktop-full
环境变量配置:
source /opt/ros/noetic/setup.bash
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装rosdepc(由于rosdep国内安装需要翻墙,所以安装rosdepc):
wget http://fishros.com/install -O fishros && . fishros(选择安装rosdepc即可)
- PCL安装
sudo apt install libpcl-dev
- Eigen安装
git clone https://gitlab.com/libeigen/eigen.git
cd eigen
git checkout 3.3.4
mkdir build
cd build
cmake ..
sudo make install
sudo cp -r /usr/local/include/eigen3 /usr/include
- Livox_Ros_Driver 安装(在根目录下)
Livox-SDK安装:
git clone Livox-SDK: nics-robot/Livox-SDK
cd Livox-SDK
cd build && cmake ..
make
Sudo make install
Livox-ros-driver安装(github有些时候会卡,可以使用gitee地址):
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
(Gitee地址:Livox-SDK: nics-robot/Livox-SDK)
cd ws_livox
catkin_make
source ./devel/setup.sh
- Fast-lio安装
cd ws_livox/src
git clone https://github.com/hku-mars/FAST_LIO.git
cd FAST_LIO
git submodule update --init
cd ../..
catkin_make
(6)验证安装是否成功(能正常执行并打开即可):
roslaunch fast_lio mapping_avia.launch
roslaunch livox_ros_driver livox_lidar_msg.launch
- 报错解决方法
- 出现include livox-xx.h的错误:livox-SDK安装或编译失败,重新再安装编译一次上面的Livox-SDK安装。
- 使用我上述办法安装的是国内的rosdep 就是 rosdepc,所以如果有跟rosdep相关操作直接改成rosdepc就行。
- git submodule update --init 无法正常执行
若是git submodule update --init报错或者失败的话:修改Fast-lio文件中的.gitmodules文件中的地址,将里面的github地址改为码云地址https://gitee.com/joosoo/ikd-Tree.git就可以了
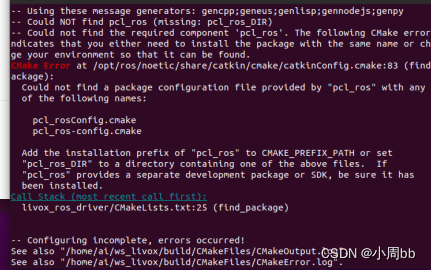
(4)报错显示缺少包如下图,大概率是ROS版本和Ubuntu版本没对上,再次确认Ubuntu和ROS是否分别为20.04.6和ROS-noetic。
- 每次数据采集需要的操作及指令
以下每一步都需要打开新的终端执行:
(1)打开ROS核心:
roscore
(2)打开fastlio消息采集launch
cd ws_livox/src
source /opt/ros/noetic/setup.bash
roslaunch livox_ros_driver livox_lidar_msg.launch
(3)打卡fastlio制图launch
cd ws_livox/src
source /opt/ros/noetic/setup.bash
roslaunch fast_lio mapping_avia.launch
(4)打开ros记录topic数据
rosbag record -a


