
- 1利用list快速的模糊搜索_list
两个字段模糊查询 - 2Hbase在集群中启动时碰到的问题
- 3python学习 第八章习题_python第八章作业(初级)
- 4CORS跨域资源共享漏洞的复现、分析、利用及修复过程_cors漏洞
- 5GoLang 读取CSV文件_golang csv
- 6二本Java小菜鸟9面字节跳动却被秒成渣渣,发誓玩命复习三个月,定要挺进Alibaba!
- 7自然语言处理在推荐系统中的应用
- 82023网络安全面试题(附答案)+面试经验_7、请求头中哪些有可能造成危害的?
- 9JavaScript数据结构之栈结构_js中能使用的栈结构
- 10Python获取本机IP地址的几种方式~转_python可以获取ipc段的方法
SUMO交通仿真-核心概念和基础知识速览_sumo中的depart是什么单位
赞
踩
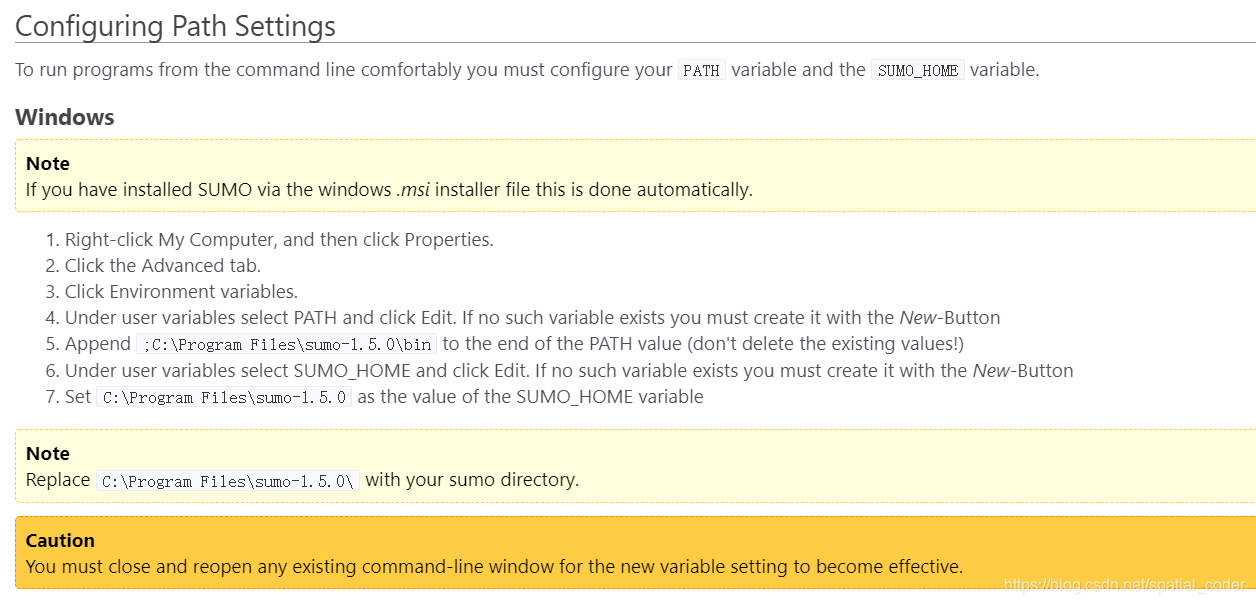
sumo环境变量设置
sumo1.7默认安装在c盘eclipse目录下。
用户变量添加SUMO_HOME。官网说明
注意事项
- 速度默认单位为m/s。 (recall that SUMO always uses m/s as the unit for speed, 36.11m/s ~ 130km/h)http://sumo.sourceforge.net/userdoc/Tutorials/Autobahn.html
路网配置
sumo仿真需要两个基本文件net.xml和rou.xml,即路网文件和车辆行为文件,在sumocfg配置文件中指定要用的net.xml文件和rou.xml文件即可运行仿真。路网net.xml文件生成有几种方法:
- OSM导出。在OSM官网下载需要仿真的路段,下载为osm格式,修改文件后缀名为xml,之后打开sumo命令行输入netconvert转换语句。
--ramps.guess猜测匝道。
netconvert --osm-files D:\sumo\3.osm.xml --ramps.guess -o D:\sumo\3.net.xml
- 1
- 编写nod.xml节点文件和edg.xml边文件,然后通过netconvert工具去将这两个文件结合成net.xml文件。
JOSM对地图进行清洗
交通需求建模
rou文件即交通需求建模,具体有几种方法。
route & trip
trip是车辆从一地到另一地,通过设定起始边edge、终止边edge和驶离时间。而route可以看作扩大的trip,不值包含车辆经过的第一条边和最后一条,而是包括车辆经过的所有边。route2trips.py可以将route拆分成trip。
输入数据方法
- 使用trip定义。每个trip包括the starting edge、 the ending edge and the departure time。
- 使用flow定义。与trip基本相同,但是可将有相同到达和离开边的车辆作为一个流处理。注意:如果使用每小时交通量来控制车辆数,最终仿真生成的结果会基本接近设定的每小时交通量。
- randomTrip,根据net.xml文件随机生成交通流,但是结果不一定真实。
-o是使用randomtrip脚本生成的是trip文件,参数添加-r则调用duarouter根据trip转为rou文件。
randomTrips.py -n D:\sumo\3.net.xml -o D:\sumo\3.trips.xml -e 3600 --trip-attributes="departLane=\"best\" departSpeed=\"max\" departPos=\"random\"" -r D:\sumo\3.rou.xml
- 1
流量路由分配
- OD2Tripseg
导入OD矩阵转为单个车辆行程trip。 - JTRrouter
基于交通流量和交叉口转向率计算路径。 - DUArouter
基于最短路径算法计算车辆路径。使用动态用户分配算法DUA达到用户均衡状态DUE。
duarouter将flow转rou - DFrouter
基于线圈数据计算车辆路径route。 - MArouter
计算宏观用户分配,可使用incremental、user equilibrium、stochastic user equilibrium三个选择。
检测线圈
<additional>
<inductionLoop id="myLoop1" lane="foo_0" pos="42" freq="900" file="out.xml"/>
<inductionLoop id="myLoop2" lane="foo_2" pos="42" freq="900" file="out.xml"/>
....
</additional>
- 1
- 2
- 3
- 4
- 5
id是给E1线圈起个标识名字,lane和pos是线圈放在何车道何处。freq是收集到的数据累加的频次,file是指定输出结果的文件名。
线圈检测的输出结果为:
<interval begin="''<BEGIN_TIME>''" end="''<END_TIME>''" id="''<DETECTOR_ID>''" \
nVehContrib="''<MEASURED_VEHICLES>''" flow="''<FLOW>''" occupancy="''<OCCUPANCY>''" \
speed="''<MEAN_SPEED>''" harmonicMeanSpeed="''<HARM_MEAN_SPEED>''" length="''<MEAN_LENGTH>''" nVehEntered="''<ENTERED_VEHICLES>''"/>
... further intervals ...
- 1
- 2
- 3
- 4
nVehContrib是仿真时段完全通过检测器的车辆数,而nVehEntered是所有接触到检测器的车辆数(包括换道未经过、到达或仿真结束时仍在检测器的车辆)。flow是车辆数换算成辆/小时,occupancy是占有率,speed是时间平均车速,harmonicMeanSpeed是空间平均车速。
generateTLSE1Detectors.py根据net文件为某个交叉口生成E1检测器。
注意需要把仿真进程停止即关闭sumocfg后感应线圈数据才能输出。
- Lanearea Detectors(E2)
面域检查器,类似摄像头,本身具有长度 length或pos,endPos,输出结果可用于测量排队长度。 - Multi-Entry-Exit Detectors(E3)
车辆属性设置
- 通过
vType定义车辆属性和跟驰、换道模型参数。注意xml的语法,vType<>属性下子属性的添加时可用将子属性包括其中如<laneChanging-LC2013 …/>,子属性结尾加/表示子属性结束。
<additional>
<vType id="myType" length="5" maxSpeed="27" vClass="passenger" guiShape="passenger"><!-- guiShape="passenger" -->
<carFollowing-Krauss accel="0.8" decel="4.5" sigma="0.5"/>
<laneChanging-LC2013 lcStrategic="0.5" lcCooperative="0.0"/>
</vType>
</additional>
- 1
- 2
- 3
- 4
- 5
- 6
制定一个跟驰模型:
<vType id="idmAlternative" length="5" minGap="2" carFollowModel="IDM" tau="1.0" .../>
- 1
对于换道模型:
The parameters are set within the <vType>:
<vType id="myType" lcStrategic="0.5" lcCooperative="0.0"/>
- 1
- 2
- 3
速度分布
http://sumo.sourceforge.net/userdoc/Definition_of_Vehicles,_Vehicle_Types,_and_Routes.html#speed_distributions
speedFactor指速度超过道路限速值的比例, speedDev指The deviation of the speedFactor。
speedFactor=“normc(1,0.1,0.2,2)” will result in a speed distribution where 95% of the vehicles drive between 80% and 120% of the legal speed limit
特殊设置
- rerouter路径重导
rerouter机制是车辆到达某一路径后 - vss可变限速控制
<additional>
<variableSpeedSign id="VSS_ID" lanes="LANE_IDS" file="DEF_FILE">
<step time="<TIME>" speed="<SPEED>"/>
... further entries ...
</variableSpeedSign>
</additional>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
time="
<vss>
<step time="<TIME>" speed="<SPEED>"/>
<step time="<TIME>" speed="<SPEED>"/>
... further entries ...
</vss>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- sublane通常情况下一根车道只能行驶一辆车,sublane是子车道设置,允许多辆车并列行驶在一个车道上。
子车道设置可用于三辆车并行在两个车道上、紧急救援车辆仿真、车辆横向移动仿真(横向加速度和速度、冒进型驾驶员的横向侵犯、变道时的动态纵向间隙接受等)
参数latAlignment: prefered lateral alignment within a lane,latAlignment="compact"时compact: stay close to the neighboring vehicle on the right。 - SSM交通安全评价设备
驾驶员状态
事故仿真
仿真运行设置
sumocfg
- sumocfg可选参数语法
注意sumocfg即为配置文件的后缀名。附加文件value可以写多个xml文件。
additional-files value=“input_additional.add.xml,input_additional2.add.xml”
<input>
<net-file value="net.net.xml"/>
<route-files value="input_routes.rou.xml"/>
<additional-files value="input_additional.add.xml,input_additional2.add.xml"/>
</input>
- 1
- 2
- 3
- 4
- 5
- 仿真时长
–begin --end
在sumocfg文件中添加元素设置。
<time>
<begin value="0"/>
<end value="1000"/>
</time>
- 1
- 2
- 3
- 4
应注意的是,仿真停止是在所有生成的车辆都离开路网后才停止仿真,如果仿真时长达到时还有车辆未离开路网,则仿真还会继续运行。
- 仿真步长
仿真步长单位为秒,默认为1秒,--step-length 0.01可改为0.01秒,注意步长关系驾驶员反应时间的下界,因此不建议设置步长大于1. - 多次仿真
根据sumocfg文件,设置不同的随机种子多次仿真,-n即次数。
python <SUMO_HOME>/tools/averageRuns.py example.sumocfg -n 100
- 1
输出结果
- FCDoutput
- summary
- tripinfo
- fulloutput
- vtk
输出VTK可视化软件支持的格式,可进行多种可视化的分析。 - lanechange
输出仿真中车道变化的记录,包含车道变换的原因speedGain、strategic、cooperative、keepRight、sublane、traci等。 - SSM安全指标输出
- 边或节点数据输出
- xml2csv.py 将xml转成csv,脚本在tools下xml目录里
https://sumo.dlr.de/docs/Tools/Xml.html#xml2csvpy

