
热门标签
热门文章
- 1fastJson的使用_fastjson putifabsent
- 2第十六届智能车竞赛全国总决赛究竟该怎么举办讨论中的“混沌”现象_智能车大赛为啥这么慢呢
- 3处理解决运行前端脚手架工程报错: ‘vue-cli-service‘ 不是内部或外部命令,也不是可运行的程序 或批处理文件。附带 Linux
- 4实时数仓之实时数仓架构(理论篇)
- 5查看安卓app包名的5种方法_安卓包名查看
- 6【C++】1179 - 求N个整数的平均数、众数和中位数 一_1179: 【入门】求n个整数的平均数、众数和中位数
- 7springboot集成-mybatis-puls
- 8用css画一条高度为0.5px的线_css 高度 0.5px
- 921天学通python第4章课后题答案_Python程序设计课后习题答案-第三单元
- 10Apusic应用服务器文档_com.apusic.ams.embed
当前位置: article > 正文
117篇 | 3D Gaussian Splatting论文
作者:Gausst松鼠会 | 2024-05-04 08:07:40
赞
踩
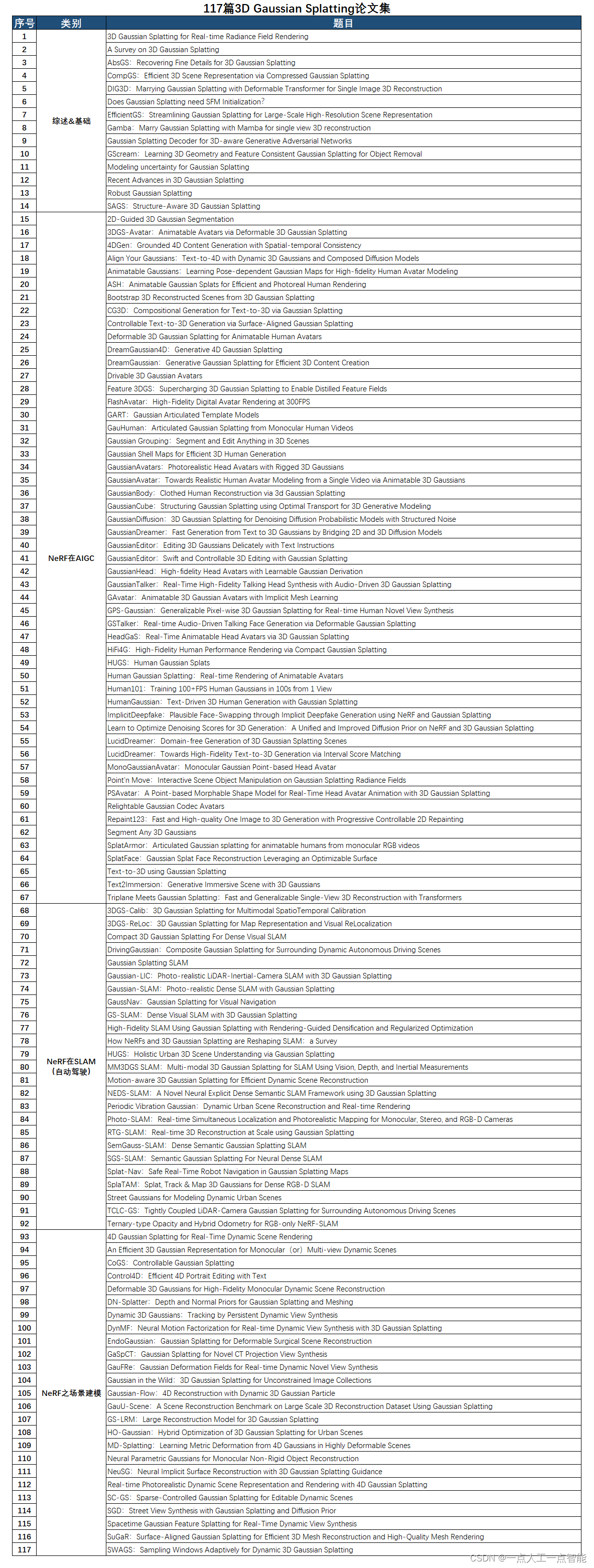
117篇 | 3D Gaussian Splatting论文
本论文集划分为4个部分:综述&基础(14篇)、NeRF在AIGC(54篇)、NeRF在SLAM(自动驾驶)(25篇)、NeRF之场景建模(25篇)
https://t.zsxq.com/3ATyE![]() https://t.zsxq.com/3ATyE
https://t.zsxq.com/3ATyE
3D Gaussian Splatting(3DGS)是一种用于实时辐射场渲染的光栅化技术,它通过对3D高斯分布的描述,实现了实时渲染从小图像样本中学习到的逼真场景。该技术的核心是光栅化,即将3D高斯分布以像素的形式展现在2D平面上。以下是关于3DGS的详细介绍:
3D GS的实现原理分为以下几个步骤:
1. 运动结构恢复(SfM):通过一组图像估计点云,这是从2D图像估计3D点云的一种方法,可以通过COLMAP库实现。
2. 转换为高斯分布:将每个点转换为高斯分布,这对于光栅化已经足够。然而,仅从SfM数据中只能推断出位置和颜色,为了学习产生高质量结果的表示,需要对其进行训练。
3. 模型训练:训练过程使用随机梯度下降,类似于神经网络,但没有层。训练步骤包括:根据光栅化图像和地面真实图像之间的差异计算损失。
4. 可微分高斯光栅化:光栅化器是可微分的,因此可以用随机梯度下降进行训练。然而,这仅与训练相关 - 训练有素的高斯也可以用不可微的方法呈现。
3DGS受到广泛关注的原因主要有以下几点:
1. 高质量的实时场景渲染:通过3DGS技术,可以实现实时渲染从小图像样本中学习到的逼真场景。
2. 技术未知领域的探索:关于Gaussian Splatting还能做什么还有很多未知数,例如是否可以模拟反射等。
3. 对嵌入式人工智能研究的兴趣:人们越来越关注如何将人工智能技术应用于3D空间表示等领域。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Gausst松鼠会/article/detail/533515
推荐阅读
相关标签

