
- 1FreeRtos 操作系统 STM32 CubeMx系列学习笔记_stm32cubemx freertos 队列
- 2Android Studio 模拟器重启(解决模拟器卡死问题)
- 3AndroidStudio离线安装和配置_android studio可以用文件拷贝粘贴的方法进行离线安装吗
- 4基于JAVA(springboot)后台微信自我健康管理小程序系统设计与实现
- 52022年职业院校技能大赛高职组云计算赛项试卷——云计算赛项第二场-容器云_2022云计算高职竞赛私有云软件包
- 6plsql查看表空间_PG日常运维--统计数据库,表,索引,表空间以及大小
- 7【MATLAB】史上最全的25种信号分解算法全家桶_信号分解 ncmd
- 8Android使用Gradle kotlin dsl 优雅配置构建项目_build.gradle.kts配置
- 9不容错过的10个免费AI绘图软件_免费的ai作图软件
- 10Klipper seria.c 文件代码分析_klipper 下位机代码
【三维重建】三维重构基础知识、三维数据、重建流程
赞
踩
1.在计算机内生成三维信息
1.使用几何建模软件,通过人机交互生成人为控制下的三维:3DMAX、Maya、AutoCAD、UG
2.获取真实的物体形状:三维重构
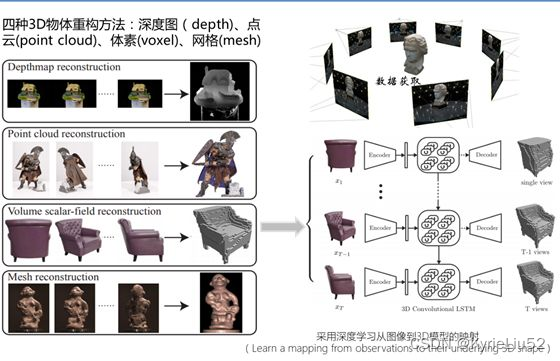
三维图像重构:
摄像机获取图像,对图像分析处理,结合CV知识推导出现实中物体的三维信息
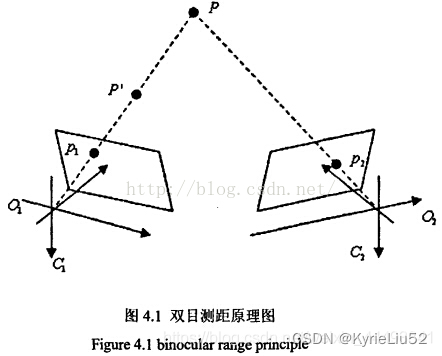
从二维图像到三维空间的重构(模仿生物两只眼睛观察物体产生的深度)
对二维图像中像素点的三维信息的恢复,尤其是深度信息
一般采用两个摄像机,对同一个物体进行采集。
单视图:信息不完全,需要利用经验知识
多视图:类似人的双目定位,相对比较容易
理想:对每个像素点的深度进行恢复
三维矢量图形 代替 三维位图
位图:记录一个个的点位,以像素为单位,放大后图像变得模糊不清
矢量图:不受分辨率影响,适合三维建模,线条顺滑,不逼真,无法产生多彩多变的图像
过程:
图像获取:获取二维,影响因素:光照,相机几何特性
摄像机标定:建立有效的成像模型,求解摄像机的内外参数,结合图像得到在空间中的三维点坐标
特征提取:特征点、特征线、区域。
大多以点为匹配基元,怎么提取与怎么匹配 紧密联系,提取时确认匹配方法
提取算法:
基于方向导数的方法
基于图像亮度对比关系的方法
基于数学形态学的方法
立体匹配:根据提取的特征,建立各个图像之间的对应关系,将同一个物理空间点,在不同的图像中的成像点,一一对应起来。影响因素:光照,噪声,物体特性,摄像机特性
三维重建:利用 匹配结果+摄像机标定的内外参数 进行重建
重构方法:
空间点的重建:最基本
空间直线、空间二次曲线的重建
极线约束法
全像素的三维重建:最理想,测量条件严格,仅限于某一具体对象
空间点的三维重建举例:
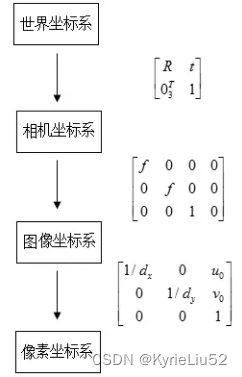
四个坐标系
1.像素坐标系:图像的每个像素点,存储在数组中,在图像左上角定义原点,建立图像坐标系uv,坐标分别对应数组中的存储位置
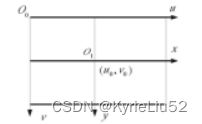
2.图像坐标系(ICS):用来表示像素在图像中的物理位置所建立的坐标系,原点一般在中心。上图xy。
3.摄像机坐标系(CCS):如图,XY轴与成像平面坐标系的xy平行,Z轴与光轴平行,垂直于图像,交点为图像的主点,也就是成像平面坐标系的原点。OO‘为焦距。
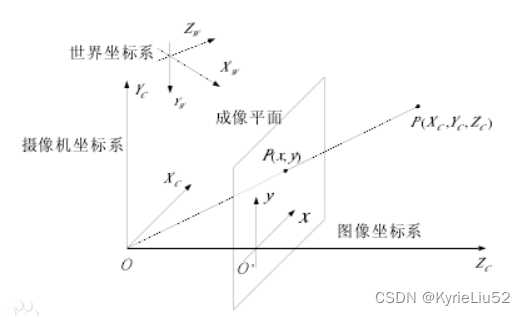
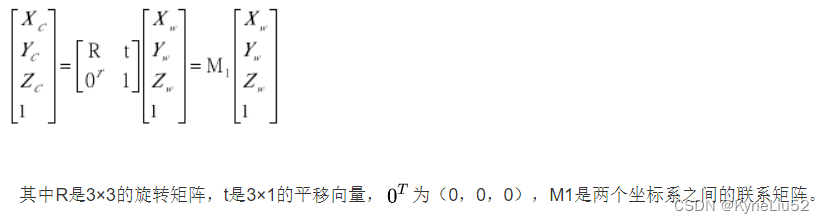
4.世界坐标系(WCS):在环境中选择一个参考坐标系,描述的是摄像机和物体的位置。与摄像机坐标系的关系用旋转矩阵R和平移向量t来描述。对应关系如下:
坐标系转换
记一个点在
世界坐标系(WCS,World Coordinate System)中的坐标为 X w = [ x w , y w , z w ] T X_w=[x_w,y_w,z_w]^T Xw=[xw,yw,zw]T,
相机坐标系(CCS,Camera Coordinate System)的坐标为 X c = [ x c , y c , z c ] T X_c=[x_c,y_c,z_c]^T Xc=[xc,yc,zc]T,
相机图像中的投影(ICS,Image Coordinate System)中的坐标为 X = [ u , v ] T X=[u,v]^T X=[u,v]T
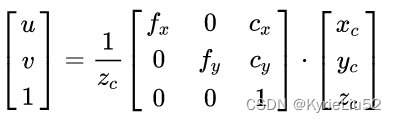
内参矩阵
表示相机和图像的关系
外参矩阵
相机和世界的变换
外参矩阵包括平移矩阵t 和 旋转矩阵R

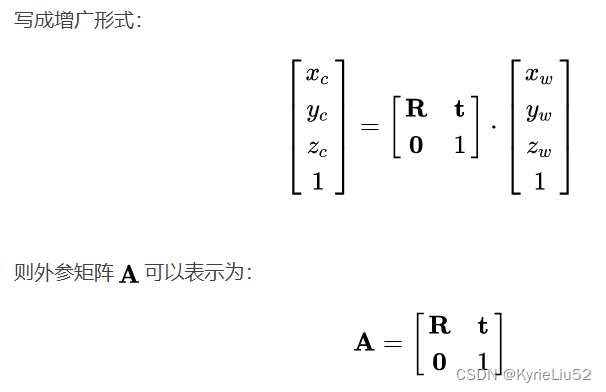
R为3x3, t为3x1
因此,结合上面两个,推导出 世界和图像的转换

图像采集设备的标定方法:
摄影测量学的传统设备标定方法:17个参数描述二维与三维的约束关系,计算量大,高精度
直接线性变换法:参数少,便于计算
2.相关概念
(1)彩色图像和深度图像
彩色:RGB,像素点存储其亮度
深度:像素点存储该点到相机的距离,深度值
深度值只与该点到摄像机的距离有关,和光照,环境,方向都没有关系。
但是,由于物体表面反射,半透明或透明物体,深色物体,距离超过量程等因素,会造成深度图缺失
利用一张RGB+一张dept,可以补全
(2)PCL
Point Cloud Library 点云库
PCL框架包括很多先进的算法和典型的数据结构,如滤波、分割、配准、识别、追踪、可视化、模型拟合、表面重建等诸多功能
libpcl I/O:完成数据的输入、输出过程,如点云数据的读写;
libpcl filters:完成数据采样、特征提取、参数拟合等过程;
libpcl register:完成深度图像的配准过程,例如迭代最近点算法;
libpcl surface:完成三维模型的表面生成过程,包括三角网格化、表面平滑等。
(3)点云数据(PCD)
扫描资料 以点的形式记录,点可以是 三维坐标、颜色、光照强度等。
点云包括几何信息和非几何信息:
几何信息:(能够被空间变换影响的,点的这部分维度叫做特征)如:点的坐标、曲面法线、法向量、切向量。
非几何信息:(不能被空间变换影响,这部分维度叫做描述子)如:颜色、温度、光照强度。
3.三维重建流程
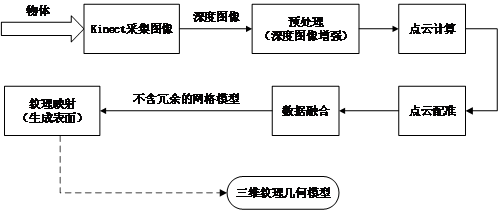
比较常见的流程是:
提取图像特征(如SIFT、SURF等)->利用特征将图像计算图像之间的特征匹配->基于匹配的特征进行稀疏重建,得到各个图像的相机位姿和稀疏的特征点云(SfM)->基于相机位姿进行稠密重建,得到稠密点云(PMVS/CMVS)->基于点云重建网格、体素或者纹理
3.1 深度图像获取
同时获取深度图像和彩色图像
3.2 预处理
对深度图像进行去噪和修复(图像增强)
3.3 点云计算
预处理后的图像具有二维信息,像素点的值为深度信息,物体表面到传感器之间的直线距离
根据上面的结果,计算推导出 世界坐标系和图像像素坐标系之间的转换关系
3.4 点云配准
多个不同角度的图片,之间有一些公共部分
为了利用深度图像进行三维重建,需要对图像进行分析,求解各个图片之间的变换参数。
这个配准的过程,以公共部分为基准,把不同时间、角度、光照的多个图像,叠加匹配,到统一的坐标系中。
计算出每个图片相应的 平移向量与旋转矩阵,消除冗余信息
(1)粗糙配准
提取多个图片之间的特征点(特征点可以是:直线、拐点、曲线曲率;自定义符号、旋转图形、轴心)
根据特征方程 初步配准
粗糙配准后,点云和目标点云 将处于同一尺度与参考坐标系内
通过自动 记录坐标,得到粗糙配准的 初始值
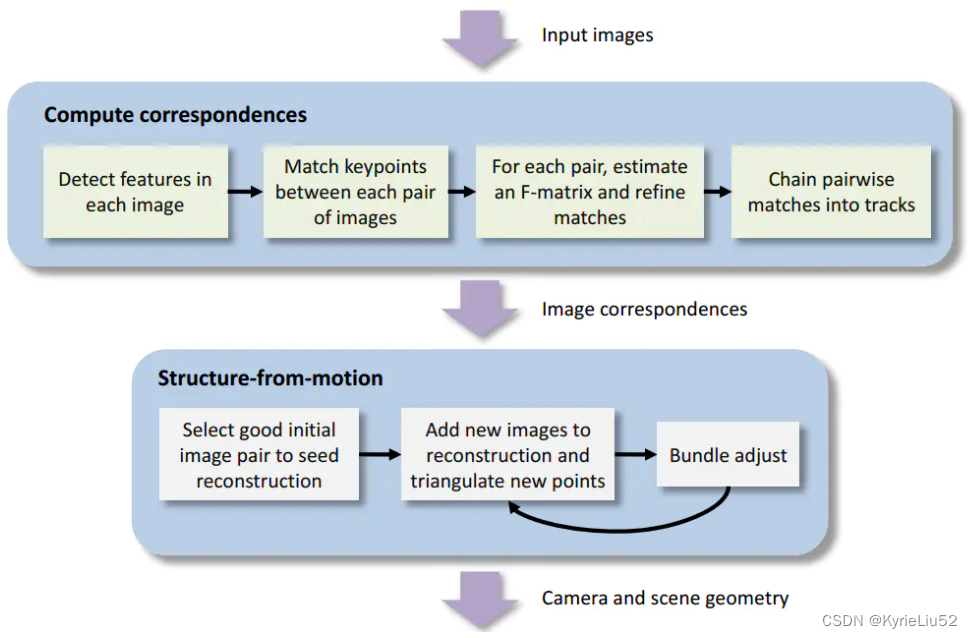
算法:SFM(Structure From Motion)
主要用在单目重建,一段时间内获取连续图像,重建三维环境
双目:多个摄像机,拍摄同一时刻的同一物体,也称为静态立体视觉
单目:一个摄像机,但单个图像无法完成,需要一段时间的一系列图像,也称为动态立体视觉
从不同角度拍摄同一物体
固定传感器,旋转物体
旋转传感器,固定物体
单目根据实时性不同,分为 离线重建,在线重建
离线重建:如SFM
在线重建:与SLAM (simultaneous localization and mapping,同步定位与地图绘制)和VO有联系,分为渐进式重建、直接式重建。
渐进式:(深度滤波)利用下一时刻图像,不断融合之前的三维信息
SVO: [https://github.com/uzh-rpg/rpg_svo ](https://github.com/uzh-rpg/rpg_svo (深度滤波在depth_filter.cpp) (深度滤波在depth_filter.cpp里面)
REMODE:https://github.com/uzh-rpg/rpg_open_remode
直接式:(深度融合)利用若干时刻图像,一次性完成一个场景的三维重建。与SFM类似。但计算的图像少,因此实时性高。
SfM指的是给出 n n n 个固定的三维空间点的 m m m 张图像: x i j = P i X j , i = 1 , . . . , m ; j = 1 , . . . , n . x_{ij}=P_iX_j, i=1,...,m;j=1,...,n. xij=PiXj,i=1,...,m;j=1,...,n.
从 m × n m \times n m×n个对应关系 x i j x_{ij} xij 中估计出 m m m个投影矩阵 P i P_i Pi和 n n n 个三维空间中的点SfM问题中的不确定性
如果我们对场景进行一个变换 Q Q Q,同时对相机矩阵进行其逆变换 Q − 1 Q^{-1} Q−1,则图像会保持不变:
x = P X = ( P Q − 1 ) ( Q X ) x=PX=(PQ^{-1})(QX) x=PX=(PQ−1)(QX)
因而SfM问题中会存在不确定性,通过一些约束可以减小不确定性。
(2)精细配准
经过粗糙配准,得到变换估计值,作为初始值
不断收敛和迭代 的进行精细配准,达到更加精准
基于最小二乘法 对 误差函数 进行最小化处理,反复迭代,直到均方差误差小于设定阈值
算法:ICP(迭代最近点)、SAA(模拟退火)、GA(遗传算法)
拓展:最小二乘法(最小平方法)(二乘就是平方的意思)
作用:误差估计、不确定度、系统辨识及预测、预报
数学优化技术,通过 最小化误差的平方和 寻找数据的最佳函数匹配
利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小
同一组数据,选择不同的 f ( x ) f(x) f(x) ,通过最小二乘法可以得到不一样的拟合曲线,最小二乘法,就是找一个最接近正确的fx
(3)全局配准
使用整幅图像 直接计算转换矩阵。
通过精准配准的结果,进行多帧图像的配准
序列配准:按照一定顺序
同步配准:一次性
减少误差,但消耗内存,时间复杂度也大
3.5 数据融合
配准后的深度信息,仍然是空间中散乱无序 的点云数据,只能展现物体部分信息。
对点云数据进行 融合,获得更加精细的重建模型
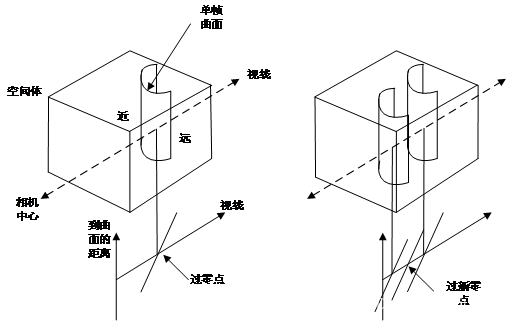
KinectFusion技术
以传感器初始位置为原点,构造体积网格,把点云空间,分割为一堆小的立方体,立方体称为:体素(Voxel)
为所有Voxel赋予SDF值(Signed Distance Field,有效距离场),隐式模拟表面
SDF:此Voxel到重建表面的最小距离值。
SDF大于0,表示Voxel在表面前
SDF小于0,表示Voxel在表面后
SDF接近0,表示Voxel贴近表面
高效实时,但可重建的空间范围小,因为需要大量空间存储大量的Voxel
TSDF(Truncated Signed Distance Field,截断符号距离场)
为了解决Voxel占用大量空间的问题。
TSDF方法,只存储 距离真实表面 较近的几层Voxel,而不是所有的
可以大幅度降低KinectFusion的内存消耗,减少模型的冗余点
3.6 表面生成
构造物体的可视 等值面
常用 体素级方法 直接处理原始的灰度体数据
体素级重建算法:MC(Marching Cube,移动立方体)
http://paulbourke.net/geometry/polygonise/
常用工具
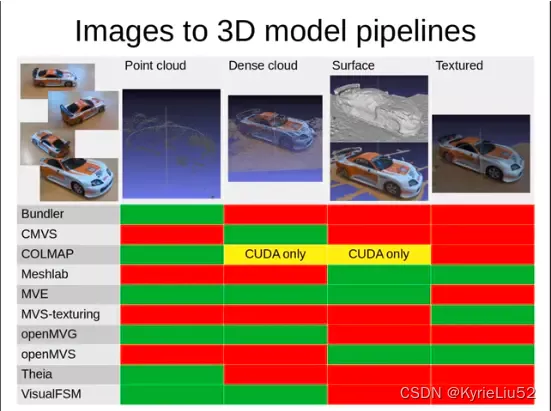
VisualSFM是一个整合了特征提取、图像匹配、稀疏点云重建、稠密重建(需要单独下载CMVS/PMVS)的软件,,免费但不开源(不能用于商业用途)。基于一系列RGB图像,我们可以得到一个稠密的点云。
PMVS/CMVS用SFM的输出作为输入,利用稀疏的特征点云、图像和对应的相机位姿来重建稠密点云。可以用于商业目的。PMVS指的是将大的点云合理地分割、重建、拼接的过程。
MeshLab是常用的点云、网格显示和处理软件,内置了很多3D重建算法,能够进行基于点云的网格重建、简化等。
COLMAP是一个开源的软件,可以用于商业目的。类似于VisualSFM的前半部分,COLMAP能够用于从图像中得到稀疏特征点云和相机位姿。如果有CUDA的话,COLMAP也能用于稠密点云重建和表面重建。
Bundler是稀疏重建工具,然而效果可能不如VisualSFM

