
- 1nvidia jetson 错误 no module named onnx_no module named 'onnx_tf
- 2python做小游戏代码可复制,python编写小游戏的代码_代码小游戏复制
- 3LeetCode-Day102(C++) 143. 重排链表_对给定的单链表重新排序:l0→ln→l1→ln-1→l2→ln-2→… 输出排序后的链表,如{1,
- 4Linux socket编程(7):I/O系统调用(读/写/连接)的超时处理
- 5聚观早报 | ChatGPT新增朗读功能;vivo X Fold3细节曝光
- 6Spring源码剖析(一):编译 spring 源码(2022最新版)_org.jetbrains.kotlin.gradle.plugin.sources.default
- 7APP添加人脸识别功能_5+app人脸识别
- 82024年免费破解版CleanMyMacX4.17Mac清理软件
- 9【环境搭建】 在Ubuntu16.04上安装nvidiaGPU驱动和cuda_sudo apt install nvidia-cuda-toolkit
- 10Java不同的service间的方法调用,如何保证事务全部回滚_不同类的事务调用会回滚吗
大陆毫米波雷达ARS408-21xx(内附毫米波雷达使用说明书)使用记录:第一期
赞
踩
前言
从我个人的学习成长历程来看,从0到1确实很难。我个人在对这款毫米波雷达的学习的过程中也比较痛苦,资料缺乏,自己的能力也不是很厉害,而且我们这边的实验室之前也没有师兄们搞过,一个人在探索,所有学习资料都从github和其他优秀的博主中获取。这边推荐我在学习这款大陆毫米波雷达时,经常看的一些好的博客,这边感谢他们的知识分享,同时也感谢其他帮助过我的前辈:
Tips:大陆毫米波雷达ASR408-21XX的相关资料包见如下的链接: ARS408-21XX说明资料
Tips:github上也已经有了关于这款ARS408-21XX毫米波雷达的开源代码(基于ROS,主要语言是C/C++),其功能是实现了数据解析和发送,我这边已经下载好了,链接如下: ARS408雷达github开源代码
但是,因为我个人的能力有限而且时间不是很充裕(暑假得将matlab下大论文的代码转成C++语言和弄大论文数据),所以我个人还没我完全吃透这个代码,因此我在使用这款代码时,我借鉴了这个开源代码,自己写了一个ARS408-21XX毫米波雷达解析程序,比较简单,但足够我使用了,我这边仅使用毫米波雷达的object目标模式,没使用cluster点云。最后还基于rviz做了个简单目标可视化,方便对radar进行空间标定,这边提供了该代码的下载链接: 本人撰写的关于ARS408-21XX解析代码(仅供参考)
一、硬件链接
我这边使用的can卡是peakcan,关于如何将其部署到自己的电脑上,参考我的这篇博客:
peakcan驱动安装
二、代码如何使用
当完成硬件连接之后,并下载了我这边提供的仅供参考的radar解析程序后,进入代码的工作空间,使用catkin_make进行编译(该代码基于ROS,使用了C语言)。
打开两个终端,一个启动roscore,一个进入radar_byqjj_ws后,执行如下指令
$ source devel/setup.bash
$ rosrun pro_can radarCan_solve
- 1
- 2
若出现如下警告:说找不到can0设备,这边建议您,先执行Ctrl+z退出该程序,然后稍微等待几秒,再重新执行“rosrun pro_can radarCan_solve”指令,因为有时候电脑搜索该can卡比较慢,所以需要稍微等待一小会,若还不行,请重试这个步骤。
图1
当程序成功运行起来之后,再打开一个新的终端,执行以下指令,打开rviz:
$ rosrun rviz rviz
- 1
然后点击rviz左上角的flie,选择open config,然后选择我代码包里面提供的sensor_obj_visional.rviz配置文件,如下图所示
图2
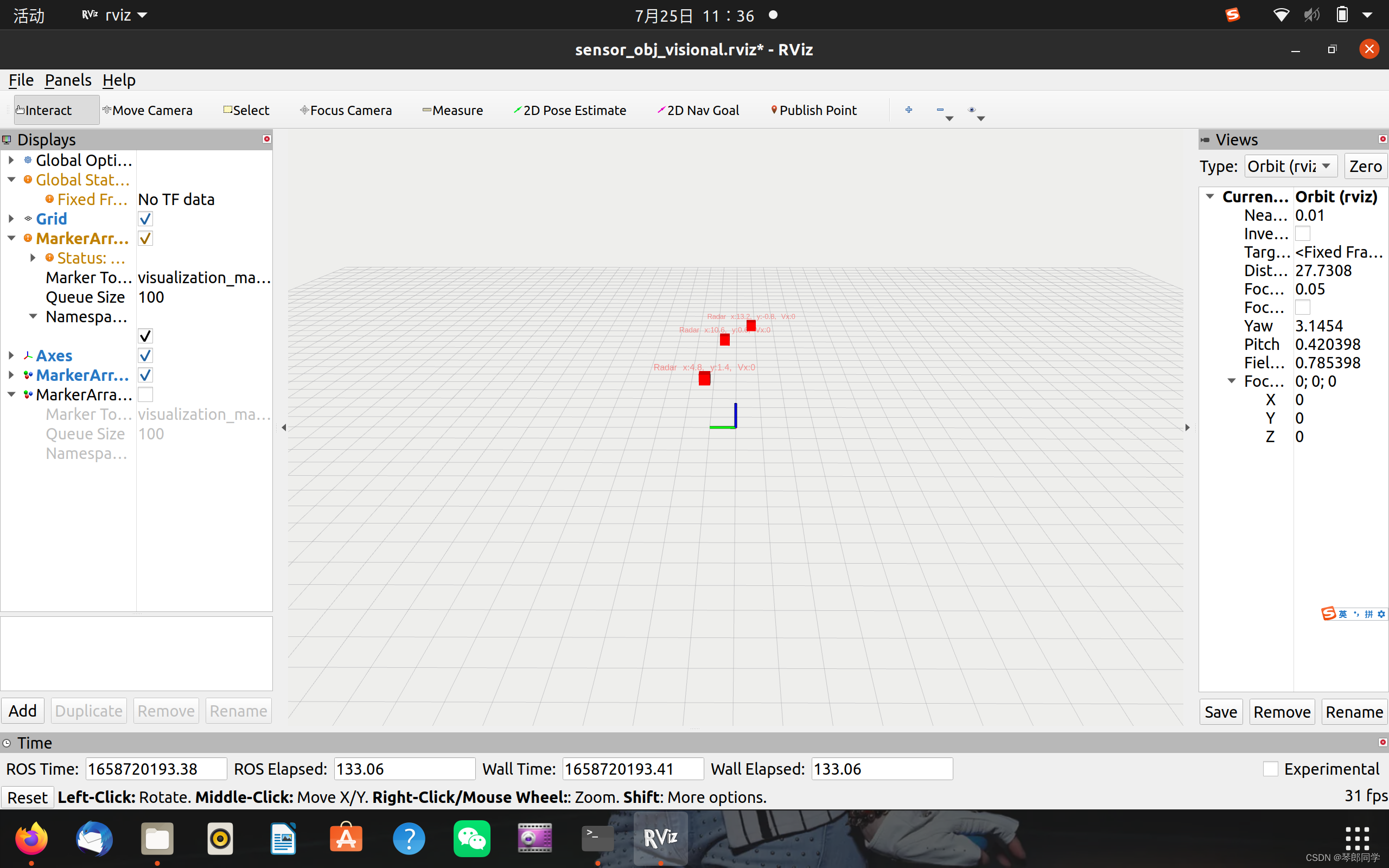
效果如下图所示:
图3
周围环境如下:
图4
三、大陆毫米波雷达ARS408-21XX解析代码说明
提示:大陆毫米波雷达ASR408-21XX解析代码如下所示,因为我这边用的是object模式,所以我只写了object的解析代码。
#define down "sudo ip link set down can0" //关闭CAN0 #define command "sudo ip link set can0 type can bitrate 500000" //大陆ars408_radar的波特率为500Kbps #define up "sudo ip link set up can0" //打开CAN0 /* 用于设置 :can_frame*/ #define CAN_EFF_FLAG 0x80000000U //扩展 帧的标识 #define CAN_RTR_FLAG 0x40000000U //远程 帧的标识 #define CAN_ERR_FLAG 0x20000000U //错误 帧的标识,用于错误检查 /* 用于设置:can_filter*/ #define CAN_SFF_MASK 0x000007FFU /* standard frame format (SFF) */ #define CAN_EFF_MASK 0x1FFFFFFFU /* extended frame format (EFF) */ #define CAN_ERR_MASK 0x1FFFFFFFU /* omit EFF, RTR, ERR flags */ using namespace std; Radar_408_60b radar_60b = {0,0,0,0,0,0,0};//dbc结构体 Radar_408_200 radar_200 = {0,0,0,0,0,0,0};//dbc结构体 Radar_408_202 radar_202 = {0,0,0,0,0,0};//dbc结构体 pro_can::sensorData sensor_data;//实例化的msg对象 bool once1 = true; /*rviz可视化函数*/ void visualization(float & obj_x, float & obj_y, float & obj_Vx, int obj_ID, ros::Publisher & markerArrayPub){ visualization_msgs::MarkerArray marker_array; //********************图形数组*********************// visualization_msgs::Marker marker_1; if (once1) { marker_1.action = visualization_msgs::Marker::DELETEALL; once1 = false; } else{ marker_1.action = visualization_msgs::Marker::ADD; } marker_1.header.frame_id = "sensor_frame"; marker_1.header.stamp = ros::Time::now(); marker_1.id = obj_ID; marker_1.type = visualization_msgs::Marker::CUBE;//设置目标物体的形状 //设置物体的大小: marker_1.scale.x = 0.5; marker_1.scale.y = 0.5; marker_1.scale.z = 0.5; //物体的颜色 marker_1.color.r = 2;//radar红色 marker_1.color.g = 0; marker_1.color.b = 0; //设置透明程度 0:透明 1:不透明 marker_1.color.a = 1; //物体的坐标(物体中心为质点) marker_1.pose.position.x = obj_x; marker_1.pose.position.y = obj_y; marker_1.pose.position.z = 0.25; //物体显示在rviz的时间 marker_1.lifetime = ros::Duration(0.01);//存在0.01s marker_array.markers.push_back(marker_1); //********************文字数组*********************// visualization_msgs::Marker marker_2; marker_2.action = visualization_msgs::Marker::ADD; marker_2.header.frame_id = "sensor_frame"; marker_2.header.stamp = ros::Time::now(); marker_2.id = obj_ID + 100; marker_2.type = visualization_msgs::Marker::TEXT_VIEW_FACING;//设置目标物为文本格式 //设置字体的大小: marker_2.scale.x = 0.5; marker_2.scale.y = 0.5; marker_2.scale.z = 0.5; //字体的颜色 marker_2.color.r = 2;//radar红色 marker_2.color.g = 0; marker_2.color.b = 0; //设置字体透明程度 0:透明 1:不透明 marker_2.color.a = 0.4; //字体的坐标 marker_2.pose.position.x = obj_x; marker_2.pose.position.y = obj_y; marker_2.pose.position.z = 0.75; //字体显示在rviz的时间 marker_2.lifetime = ros::Duration(0.01);//存在0.01s //设置---字体显示的内容 ostringstream str; str<<"Radar "<<"x:"<<obj_x<<", "<<"y:"<<obj_y<<", "<<"Vx:"<<obj_Vx; marker_2.text=str.str(); marker_array.markers.push_back(marker_2); //***************发送至rviz markerArrayPub.publish(marker_array); } &&&&&&&&&&&&&&&&&&&&&&&&&&&&-------------------------------------&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&& ///*can解析函数*/ void Radar_can2value(can_frame & frame, ros::Publisher & pub, ros::Publisher & markerArrayPub){ if (frame.can_id == 0x60b){ //*************字节段按大端(或小端方式)拼接 radar_60b.DATA0.D = frame.data[0]; radar_60b.DATA12.D = (frame.data[1] << 8) + frame.data[2]; radar_60b.DATA23.D = (frame.data[2] << 8) + frame.data[3]; radar_60b.DATA45.D = (frame.data[4] << 8) + frame.data[5]; radar_60b.DATA56.D = (frame.data[5] << 8) + frame.data[6]; float lat_distance = radar_60b.DATA23.bit.obj_lat*0.2 - 204.6;//横向距离(radar右手坐标系),统一用右手坐标系 float long_distance= radar_60b.DATA12.bit.obj_long*0.2 - 500;//纵向距离 //*************筛选 if ( fabs(lat_distance) > 4.0){//横向绝对值大于4,表示若该障碍物的横向距离的绝对值在4.0米之外,则该帧不要 return ; } else if(long_distance > 60.0){//大于60米,表示若该障碍物的纵向距离大于60m,则该帧不要 return ; } else { //解析 sensor_data.sensorType = 1;//------1表示radar sensor_data.obj_ID = radar_60b.DATA0.bit.obj_id; sensor_data.X = radar_60b.DATA12.bit.obj_long*0.2 - 500; sensor_data.Y = radar_60b.DATA23.bit.obj_lat*0.2 - 204.6; sensor_data.Vx = radar_60b.DATA45.bit.obj_vlong*0.25 - 128; sensor_data.Vy = radar_60b.DATA56.bit.obj_vlat*0.25 - 64; //--------获取系统时间戳 uint64_t sys_time=std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::system_clock::now().time_since_epoch()).count(); int32_t time_second = sys_time / 1000000; int32_t time_nsecs = sys_time % 1000000 * 1000; double timestamp_ = (double)time_second+1e-9*(double)time_nsecs; sensor_data.timestamp = timestamp_;//单位为:s //--------rviz可视化 int obj_ID = sensor_data.obj_ID; visualization(sensor_data.X, sensor_data.Y, sensor_data.Vx, obj_ID, markerArrayPub); //--------发往数据链队列 pub.publish(sensor_data); printf("Topic(sensorRawData)-----radar:目标ID%d------纵向距离%f-----纵向速度%f\n", sensor_data.obj_ID, sensor_data.X, sensor_data.Vx); } } return; } /*radar配置函数*/ bool radar_cfg(int & skt){ struct can_frame frame[2]; //struct Radar_408_200 radar_200; //radar配置使能 radar_200.DATA0.bit.RadarCfg_MaxDistance_Valid = 1;//允许配置最大距离 radar_200.DATA0.bit.RadarCfg_SensorID_Valid = 1;//允许配置radarID radar_200.DATA0.bit.RadarCfg_RadarPower_Valid = 1;//允许配置radar功率 radar_200.DATA0.bit.RadarCfg_OutputType_Valid = 1;//允许配置radar输出模式 radar_200.DATA0.bit.RadarCfg_SendQuality_Valid = 1;//允许配置radar输出cluster和object的质量信息 radar_200.DATA0.bit.RadarCfg_SendExtInfo_Valid = 1;//允许配置radar输出object的扩展信息 radar_200.DATA0.bit.RadarCfg_SortIndex_Valid = 1;//Object目标列表的当前排序索引值配置 radar_200.DATA0.bit.RadarCfg_StoreInNVM_Valid = 1;//使能;+++++++++++++++++++++++++++++++++ //radar相关参数配置 //最大距离设置 radar_200.DATA12.bit.RadarCfg_MaxDistance = ((150 - 0)/2);//150为真实物理值:150m radar_200.DATA12.bit.reserved =0; //保留位 radar_200.DATA3.bit.reserved =0; //设置radarID,输出类型,radar功率 radar_200.DATA4.bit.RadarCfg_sensorID = (0-0)/1;//radarID:为0 radar_200.DATA4.bit.RadarCfg_OutputType = (1-0)/1;//object模式 radar_200.DATA4.bit.RadarCfg_RadarPower = (1-0)/1;//标准发射功率 // radar_200.DATA5.bit.RadarCfg_CtrlRelay_Valid = 0; radar_200.DATA5.bit.RadarCfg_CtrlRelay = 0; radar_200.DATA5.bit.RadarCfg_SendQuality = 1; radar_200.DATA5.bit.RadarCfg_SendExtInfo = 1; radar_200.DATA5.bit.RadarCfg_SortIndex = 1;//按距离排序输出 radar_200.DATA5.bit.RadarCfg_StoreInNVM = 1;//使能;+++++++++++++++++++++++++++++++++ // radar_200.DATA6.bit.RadarCfg_RCS_threshold_Valid = 1; radar_200.DATA6.bit.RadarCfg_RCS_threshold = 0;//标准灵敏度 radar_200.DATA6.bit.RadarCfg_InvalidClusters_Valid = 0; radar_200.DATA6.bit.reserved = 0; // radar_200.DATA7.bit.RadarCfg_InvalidClusters = 0; //radar基本属性配置 frame[0].can_id = 0x200;//这样赋值默认标准帧。如果为扩展帧,那么 frame.can_id = CAN_EFF_FLAG | 0x123; frame[0].can_dlc = 8; //数据长度为 8个字节 frame[0].data[0] = radar_200.DATA0.D; frame[0].data[2] = radar_200.DATA12.D; frame[0].data[1] = radar_200.DATA12.D >> 8; frame[0].data[3] = radar_200.DATA3.D; frame[0].data[4] = radar_200.DATA4.D; frame[0].data[5] = radar_200.DATA5.D; frame[0].data[6] = radar_200.DATA6.D; frame[0].data[7] = radar_200.DATA7.D; //radar过滤器配置---------- frame[1].can_id = 0x202;//这样赋值默认标准帧 frame[1].can_dlc = 8; //数据长度为 8个字节 //过滤器使能 radar_202.DATA0.bit.reserved = 0; radar_202.DATA0.bit.FilterCfg_Valid = 1;//使能过滤器 radar_202.DATA0.bit.FilterCfg_Active = 1;//激活过滤器 radar_202.DATA0.bit.FilterCfg_Index = 0x9;//筛选y方向的距离用过滤条件为:0x9(长度为12bit),0x5为 radar_202.DATA0.bit.FilterCfg_Type = 1;//object过滤器 //最小距离设置 radar_202.DATA12.bit.FilterCfg_Min_X =(-1.8 + 409.5)/0.2;//车头右边1.8米以外的目标筛选掉 radar_202.DATA12.bit.reserved = 0; //最大距离设置 radar_202.DATA34.bit.FilterCfg_Max_X =(1.8 + 409.5)/0.2;//车头左边1.8米以外的目标筛选掉 radar_202.DATA34.bit.reserved = 0; radar_202.DATA5.bit.reserved = 0; radar_202.DATA6.bit.reserved = 0; radar_202.DATA7.bit.reserved = 0; frame[1].data[0] = radar_202.DATA0.D; frame[1].data[2] = radar_202.DATA12.D; frame[1].data[1] = radar_202.DATA12.D >> 8; frame[1].data[4] = radar_202.DATA34.D; frame[1].data[3] = radar_202.DATA34.D >> 8; frame[1].data[5] = radar_202.DATA5.D; frame[1].data[6] = radar_202.DATA6.D; frame[1].data[7] = radar_202.DATA7.D; int nbytes = write(skt, &frame[0], sizeof(frame[0])); //发送数据,第三个参数表示:需要发送的字节数 if(nbytes != sizeof(frame[0])){ //如果 nbytes 不等于帧长度,就说明发送失败 printf("Error\n!"); return false; }//配置失败,返回false int nbytes2_ = write(skt, &frame[1], sizeof(frame[1])); //发送数据,第三个参数表示:需要发送的字节数 if(nbytes != sizeof(frame[1])){ //如果 nbytes 不等于帧长度,就说明发送失败 printf("Error\n!"); return false; }//配置失败,返回false return true; } /*检查radar配置的函数*/ bool check_radar_cfg(int & skt){ struct can_frame recFrame; int nbytes = read(skt, &recFrame, sizeof(recFrame)); if(nbytes != sizeof(recFrame)){ //如果 nbytes 不等于帧长度,就说明发送失败 printf("Error\n!"); return false; } //该帧不是所需要的帧,返回false if(recFrame.can_id == 0x201){ struct Radar_408_201 radar_201; radar_201.DATA0.D = recFrame.data[0]; radar_201.DATA12.D = (recFrame.data[1] << 8) + recFrame.data[2]; radar_201.DATA34.D = (recFrame.data[3] << 8) + recFrame.data[4]; radar_201.DATA5.D = recFrame.data[5]; radar_201.DATA6.D = recFrame.data[6]; radar_201.DATA7.D = recFrame.data[7]; printf("当前radar的ID为:%d\n",radar_201.DATA34.bit.RadarState_SensorID); //radar功率 if(radar_201.DATA34.bit.RadarState_RadarPowerCfg == 0){ printf("当前radar的发射功率:std\n"); } else if(radar_201.DATA34.bit.RadarState_RadarPowerCfg == 1){ printf("当前radar的发射功率:3db\n"); } else if(radar_201.DATA34.bit.RadarState_RadarPowerCfg == 2){ printf("当前radar的发射功率:6db\n"); } else if(radar_201.DATA34.bit.RadarState_RadarPowerCfg == 3){ printf("当前radar的发射功率:9db\n"); } //radar输出模式 if(radar_201.DATA5.bit.RadarState_OutputTypeCfg == 0){ printf("当前radar的输出模式:不输出目标\n"); } else if(radar_201.DATA5.bit.RadarState_OutputTypeCfg == 1){ printf("当前radar的输出模式:object模式\n"); } else if(radar_201.DATA5.bit.RadarState_OutputTypeCfg == 2){ printf("当前radar的输出模式:cluster模式\n"); } sleep(1); return true; } else { return false; } } //***************************************功能函数******************************************************// void process_1(int & can_skt, struct ifreq ifr, struct sockaddr_can addr){ can_skt = socket(PF_CAN, SOCK_RAW, CAN_RAW);//创建 SocketCAN 套接字 strcpy(ifr.ifr_name, "can0" );//指定 can0 设备------------更换其他路 can,改动此 ioctl(can_skt, SIOCGIFINDEX, &ifr); addr.can_family = AF_CAN; addr.can_ifindex = ifr.ifr_ifindex; while(bind(can_skt, (struct sockaddr *)&addr, sizeof(addr)) < 0){ if (bind(can_skt, (struct sockaddr *)&addr, sizeof(addr)) > 0){ break; } printf("继续bind\n"); sleep(1); } printf("Bind success.\n"); return; } void process_2(int & can_skt){ while(radar_cfg(can_skt)==false){ if (radar_cfg(can_skt)==true){ break; } printf("Radar继续配置.\n"); sleep(1); } printf("Radar配置完成.\n"); return; } void process_3(int & can_skt){ while(check_radar_cfg(can_skt)==false){ if (check_radar_cfg(can_skt)==true){ break; } printf("Radar继续查看.\n"); sleep(1); } return; } void process_5(int can_skt, ros::Publisher pub, ros::Publisher markerArrayPub){ printf("主线程继续"); struct can_frame recFrame; int bytes; while (true)//一帧一帧的读取 { bytes = read(can_skt, &recFrame, sizeof(recFrame)); //接收总线上的报文保存在recFrame中 if (bytes != sizeof(recFrame)) { printf("rec Error\n!"); break; } else { Radar_can2value(recFrame,pub,markerArrayPub); } //usleep(10000); } } int main(int argc, char **argv) { //向ros系统注册节点 ros::init(argc, argv, "radarCan_solve"); //数据链话题 ros::NodeHandle n; ros::Publisher pub = n.advertise<pro_can::sensorData>("sensorRawData", 10); //rviz可视化话题 ros::NodeHandle nh; ros::Publisher markerArrayPub = nh.advertise<visualization_msgs::MarkerArray>("visualization_marker_radar", 10); system(down);//0路给的是:radar和vision system(command); system(up); //*******1******创建用于can收发的socket_can文件描述符 int can_skt; struct ifreq ifr; struct sockaddr_can addr; //-------------- process_1(can_skt, ifr, addr); //*******1******创建socket_can文件描述符号 //******2******radar_配置 process_2(can_skt); //******2******radar_配置 //******3******查看radar_配置 //process_3(can_skt); //******3******查看radar_配置 //******5*******解析can帧并发送实际物理值 process_5(can_skt, pub, markerArrayPub); //******5*******解析can帧并发送实际物理值 close(can_skt); //******4*******解析can帧并发送实际物理值 return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
总结
查看该代码可知,此代码只是提供了object模式的数据解析,实现了障碍物相对于毫米波雷达的坐标发布,以及横纵向速度的发布,并简单做了筛选,仅此而已。后期将继续上传更新优化后的解析、筛选程序。

