
- 1数码管的静态显示(二)
- 2珠穆朗玛峰_用c#求一张纸折多少次和珠穆朗玛峰一样高
- 3LLMs之LLaMA-2:源码解读之所有py文件(包括example_text_completion.py/example_chat_completion.py+model.py/generation_llama 2 源码分析
- 4网站如何配置CDN加速?网站域名接入腾讯云CDN的步骤(附CDN防御)_天翼云 cnd 加速,配置到 腾讯云服务器
- 5Mybatis-plus尚硅谷跟学课堂笔记_尚硅谷杨博超
- 6竞赛 LSTM的预测算法 - 股票预测 天气预测 房价预测
- 7mysql(多级分销)无限极数据库设计方法_多级分销表设计 闭包表
- 8关于一些uniapp白屏debugger思路_前端debugger调试出现空白
- 9PyQt5学习笔记9_使用setStyle和setStyleSheet进行换肤_pyqt5 setstylesheet
- 10四维彩超宝宝长相预测软件有哪些?这三款助你开启新生命之窗_四维彩超预测宝宝长相app
PatchMatch分析_金字塔 patchmatch
赞
踩
1.介绍
作为纹理合成的方法,PatchMatch利用图片中的其他区域来恢复边缘区域,想法很合理。并且在实现上巧妙的利用了offset这样一个信息,使得计算上也不算复杂。此为Barnes et al 的得意之作,去年他在我方圆3米的距离坐了2个月都没和他交流,真是暴殄良机,心塞。人总是失去了才知道珍惜- -。
1.1块(Patch)
图像一片正方形的区域,如3x3,5x5,此为PatchMatch算法的最小操作单位。作为一个块,其比单个像素所包含的信息更多,因此更好用。
1.2图像重组(Reshuffle)
Reshuffle即将一张图片进行重新组合,如将图片右上角的塔贴到左边,并且使得看起来很自然。


图一 图二
图1中可以看到塔的边缘有很明显的边界,为了消除边界,需要进行边缘的融合等操作来完成,一般方法有解泊松方程。PatchMatch中的reshuffle并不解方程,而是找到边缘部分与图片其他部分最匹配的(match)区域,利用此区域来填补边界,达到自然的效果,结果图2.
2.算法
我们需要得到的是target图片中每个区域在src图片所最匹配的区域记录在offsetmap中,即patchmatch的输出结果即为一张offset的映射。


src图片 target图片
2.1初始化offsetmap
barnes在随机初始化的基础上加上了2个trick:
1、将边界区域的offsetmap值都初始化为0,这样一般而言这些位置都很难被更改所以一开始就是对的,那么在propagation的时候就很容易向后面蔓延。
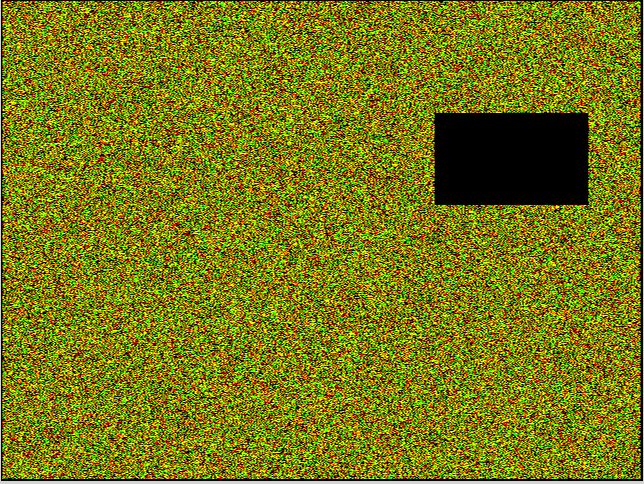
2、将被覆盖的区域的偏移量指向其原来的地方,这是一个事实,因为原来的地方和这里要变成的地方是同样一个东西。然后通过constraints来防止后面的ANN将其修改。如下图
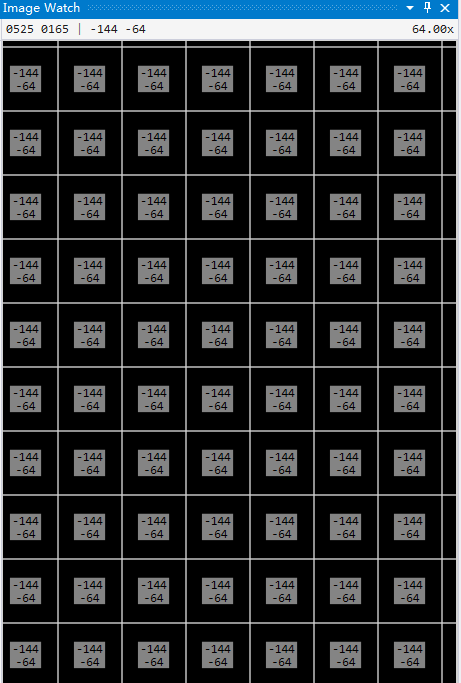
最后初始化的Offsetmap如图,可以看到边界是黑的,即其对应的match坐标就是它自己的坐标:
2.2最近邻搜索(Ann)
对于target图片中每一个patch,都要在src图片中找到最匹配的patch,Ann最后的输出就是一张记录对应位置的偏移矩阵(offsetmap,2维),由于2张图片的大小是一样的,所以只需要记录PatchA离对应PatchB的偏移量即可。
PatchMatch最近邻算法的思想精妙在于其利用了如果在src中找到与target的PatchB相匹配的PatchA,那么PatchB周围的区域也很可能与PatchA周围的区域相匹配,即图像的局部相关性,就不用全局搜索了。而其实现的精妙就是利用了偏移量,如下图
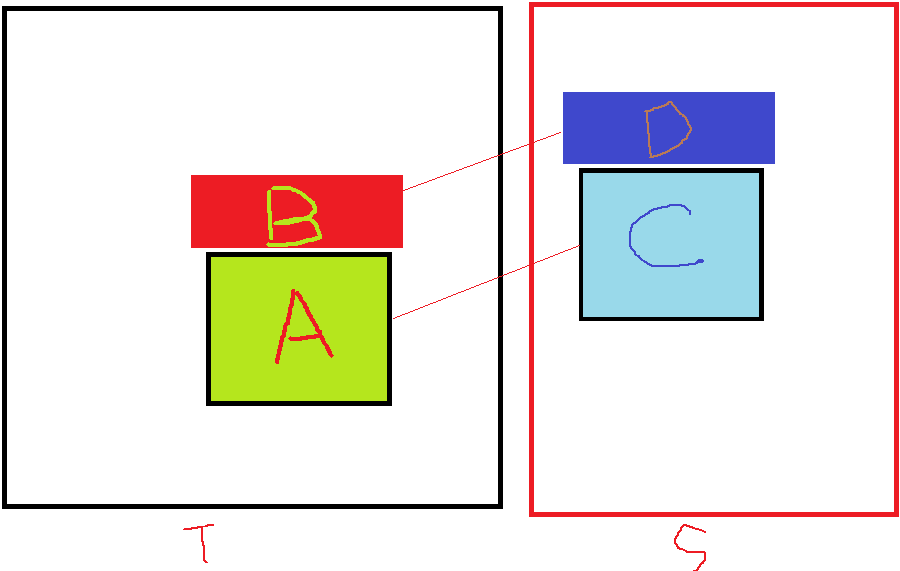
在target图片中如果找到了PatchB的对应块PatchD,那么PatchA的对应块就很可能是PatchC。
随机搜索主要分2部分:propagation和random search
2.2.1propagation(顺序蔓延):

算法在偶数次对一个Patch查找其原对应点左(x-1,y)上(x,y-1)的Patch,奇数次查找右(x+1,y)下(x,y+1)。如上图是偶数次,假设开始的时候Target中红色Patch(x,y)所对应为Source的红色Patch(offmap(x,y),这个值可能是初始化有的也可能是后面更新过的),由于其左边黑色的Patch(x-1,y)对应的是黑色(offmap(x-1,y)),所以我们认为绿色和红色匹配的概率更大,需要进行比较。而且如果说确实Source图中绿色比红色更匹配target图中的红色Patch,那么offmap(x,y)就等于offmap(x-1,y),并不是offmap(x-1,y)[x] + 1!因为是偏移量,不是具体位置
2.2.2random search(随机扰动搜索):
为了保证能够更快的找到offmap,需要给上面的顺序模式加个扰动以使得搜索空间更大。如下图,这一步骤是每对一个Patch进行顺序步骤后就进行一次。

这个随机扰动的方式是在自己为中心的某个大小矩形框内搜索,其中搜索框大小公式为:
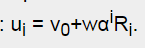
R是一个随机值(-1-1之间),w是搜索框初始大小,a是缩小系数,V0为初始的Patch位置,随着i的增加,搜索框实际大小waR将减小直至小于1则停止搜索。a一般为0.5.
ps:以上所有步骤都不会对constrants区域进行修改,因为在初始化的时候就已经确定其offset的值。
2.3Reshuffle
通过得到了offsetmap之后我们就可直接通过这个位移关系将新的图片通过“贴图”的方式将其生成。在纹理合成中一般会使用图像金字塔在不同的尺度进行合成,这样可以利用到不同尺度的信息从而使得融合效果更好,比如经过下采样之后图片一个Patch可能就包含整个物体,而在搞分辨率的图片上一个Patch可能就是一点点细节,那么我们在低分辨率的图片上就可以先找到大的物体的对应,然后将信息向上传递,就可以不断在高的分辨率的图片上找匹配而使得细节更好。下图为总体框架:


具体实现由2个问题:
1、在开始的时候如何创建第一张图片。
2、得到低分辨率的图片和offsetmap之后如何向上传递信息。
3、文章中的EM是怎么反映的。
第一个问题:我们有offsetmap,而且那张图片在复制的区域内的偏移是指向正确的位置的,那么在经过迭代后的offsetmap我们直接拿来贴图就可以得到第一张图片,而且由于分辨率较低,即使边界部分的offset匹配不对,在图片上我们也根本看不出来。
30*40 res:

60*80 res:

160*120 res:

第二个问题:这个信息通过offsetmap的插值来进行传递:
/给constrans和offsetmap上采样
void PyrUpOffsConst(Mat InO, Mat InC, Mat &OutO, Mat &OutC) {
int rows = InO.rows * 2;
int cols = InO.cols * 2;
OutO = Mat(rows, cols, InO.type());
OutC = Mat(rows, cols, InC.type());
int m = 0, n = 0;
while (m<InO.rows) {
int m2 = m * 2;
n = 0;
while (n<InO.cols) {
int n2 = n * 2;
OutC.at<uchar>(m2, n2) = InC.at<uchar>(m, n);
OutC.at<uchar>(m2 + 1, n2) = InC.at<uchar>(m, n);
OutC.at<uchar>(m2, n2 + 1) = InC.at<uchar>(m, n);
OutC.at<uchar>(m2 + 1, n2 + 1) = InC.at<uchar>(m, n);
OutO.at<Vec2f>(m2, n2)[0] = InO.at<Vec2f>(m, n)[0] * 2;
OutO.at<Vec2f>(m2, n2)[1] = InO.at<Vec2f>(m, n)[1] * 2;
OutO.at<Vec2f>(m2 + 1, n2)[0] = InO.at<Vec2f>(m, n)[0] * 2;
OutO.at<Vec2f>(m2 + 1, n2)[1] = InO.at<Vec2f>(m, n)[1] * 2;
OutO.at<Vec2f>(m2, n2 + 1)[0] = InO.at<Vec2f>(m, n)[0] * 2;
OutO.at<Vec2f>(m2, n2 + 1)[1] = InO.at<Vec2f>(m, n)[1] * 2;
OutO.at<Vec2f>(m2 + 1, n2 + 1)[0] = InO.at<Vec2f>(m, n)[0] * 2;
OutO.at<Vec2f>(m2 + 1, n2 + 1)[1] = InO.at<Vec2f>(m, n)[1] * 2;
n++;
}
m++;
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
第三个问题:EM算法是如何实现的,下面代码反映了这个算法
while (i > 0)
{
fprintf(stdout, "PyrUp Step %d\n", i);
for (int j = 0; j < EMiter; j++)
{
for (int k = 0; k < Anniter; k++)
func.EStep(offs[i], srcset[i], dstset[i], cons[i],patchsize, k, i * searchwindow);
generateimg(srcset[i], dstset[i], offs[i], patchsize);
}
PyrUpOffsConst(offs[i], cons[i], offs[i - 1], cons[i - 1]);
generateimg(srcset[i - 1], dstset[i - 1], offs[i - 1], patchsize);
i--;
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
EM算法:
最大期望算法经过两个步骤交替进行计算:
第一步是计算期望(E),利用对隐藏变量的现有估计值,计算其最大似然估计值;
第二步是最大化(M),最大化在 E 步上求得的最大似然值来计算参数的值。
M 步上找到的参数估计值被用于下一个 E 步计算中,这个过程不断交替进行。
有些程序还是要自己写一遍才知道好多细节啊- -。
3.参考资料
1、Patchmatch: Image reshuffling
2、Image reshuffling with PatchMatch
http://cybertron.cg.tu-berlin.de/pdci11ws/patchmatch/index.html
3、PatchMatch: A Randomized Correspondence Algorithm for Structural Image Editing

