
- 1postgresql11、15下载_postgresql11 下载
- 2纯 k8s 部署实现 gitlab CICD 保姆级教程_kubectl exec gitlab-0 -n gitlab -- cat/etc/gitlab/
- 3Python 下载大文件,哪种方式速度更快_python下载大文件
- 4Python 小程序之剪刀_石头_布_剪刀、石头、布python
- 5超详细的YOLO系列算法全家桶--YOLOv1-YOLOv8_yolov1到yolov8总结
- 6MacOS怎么安装Nacos(附带:Windows系统)_nacos下载mac
- 7springboot项目获取真实用户ip(不是虚拟ip)_springboot 获取真实ip
- 8【免费题库】华为OD机试 - 选修课(Java & JS & Python & C & C++)
- 9软件测试必备7大技能_软件测试需要掌握的东西
- 10高压互锁(HVIL)
fanuc机床使用focas协议采集数据window和Linux都支持(下载中包括所有资料和demo)
赞
踩
focas协议是用来采集fanuc机床的协议,通过以太网进行采集。
1. focas1/2的简明教程可以看(稍后我会把所有的资料都上传,这是我从各个地方收集到并整理的):
这个文档主要介绍了fanuc机床的ip和端口如何配置,能通讯的数据分类,和采集方法的简单介绍
![]()
如果你按照上面的文档配置,那么你应该就可以连接到机床。下载
需要资料的你也可以直接加我VX:zhu1013443437. 加的时候备注CSDN。有偿
2.利用focas API采集数据
1.按照如下图1路径找到了FWLIB32,记住使用IE浏览器打开
2.如图2点击允许阻止的内容,Connection type选择Ethernet(网口),Applicable CNCs 选择机床的类型,这里我使用oi-MODEL F(大家可以根据自己的机床类型选择)
3.如图3点击![]() 这时候就会单出功能函数,如图4.相关的函数使用方法和说明文档的中文版,我也打包放一起了。下载
这时候就会单出功能函数,如图4.相关的函数使用方法和说明文档的中文版,我也打包放一起了。下载
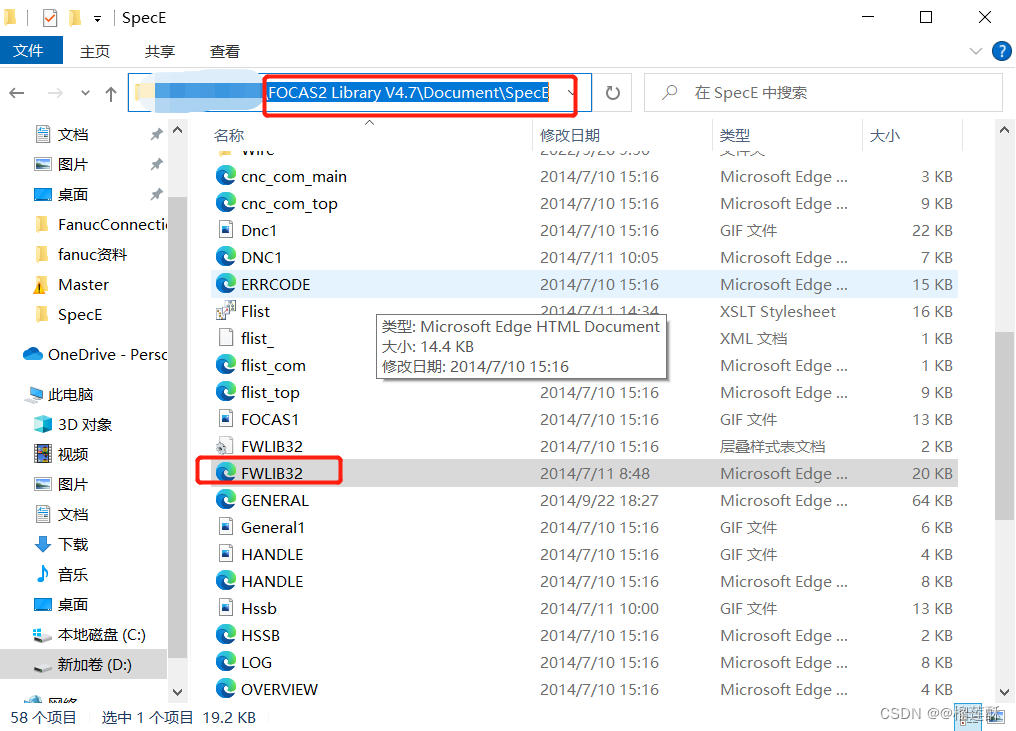
图1

图2
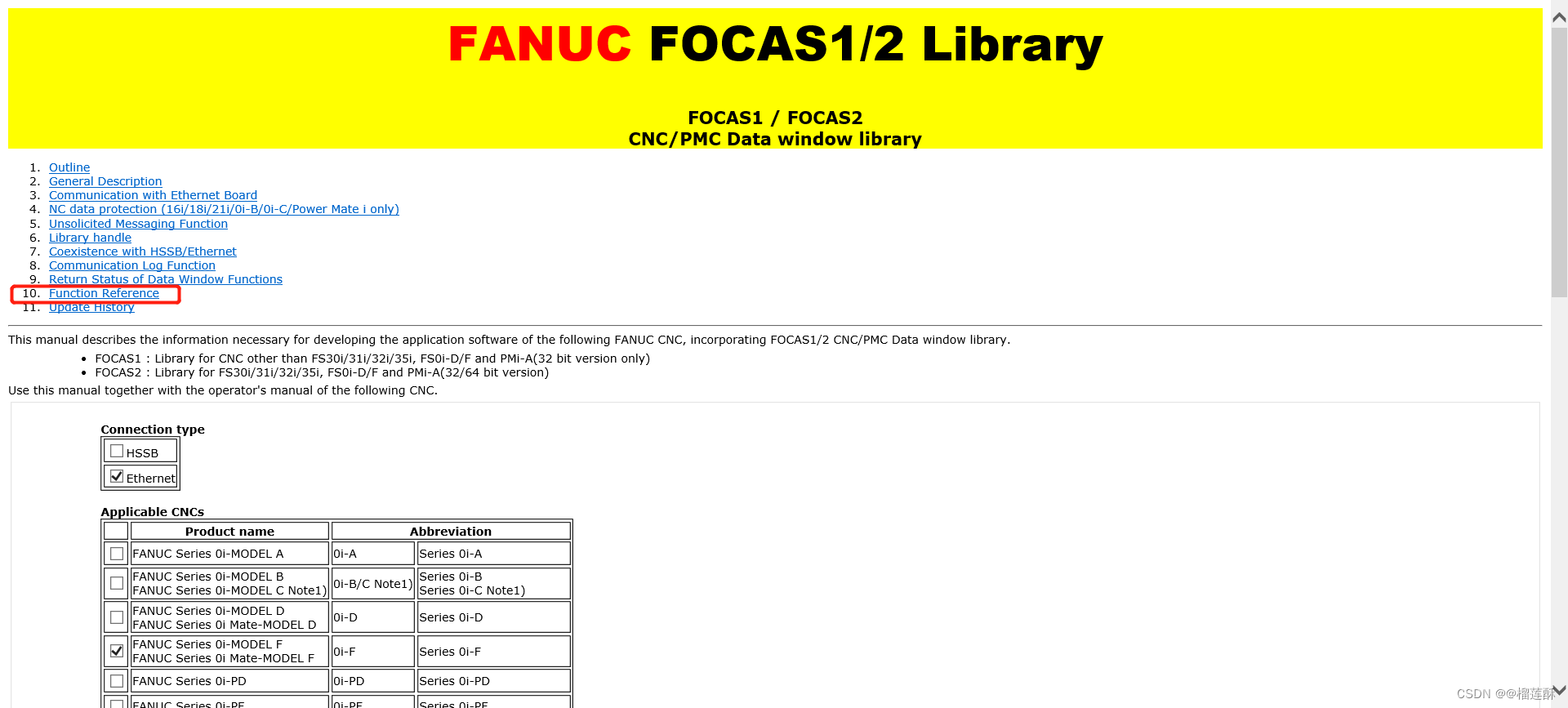
图3

图4
3.使用C#连接实战
在介绍了机床的IP和端口的配置和focas相关函数的使用以后,接下来我们用C#连接写一下简单的demo
环境准备:
1.开发环境:VS2019 winform
2.找到fwlib32.dll和fwlib1.dll2个必备的库,如图5
3.按照如下路径找到fwlib32.cs复制到项目中,因为focas协议用的是C++写的,这个是官方给我们用C#封装好调用C++的库,直接使用即可,如图6
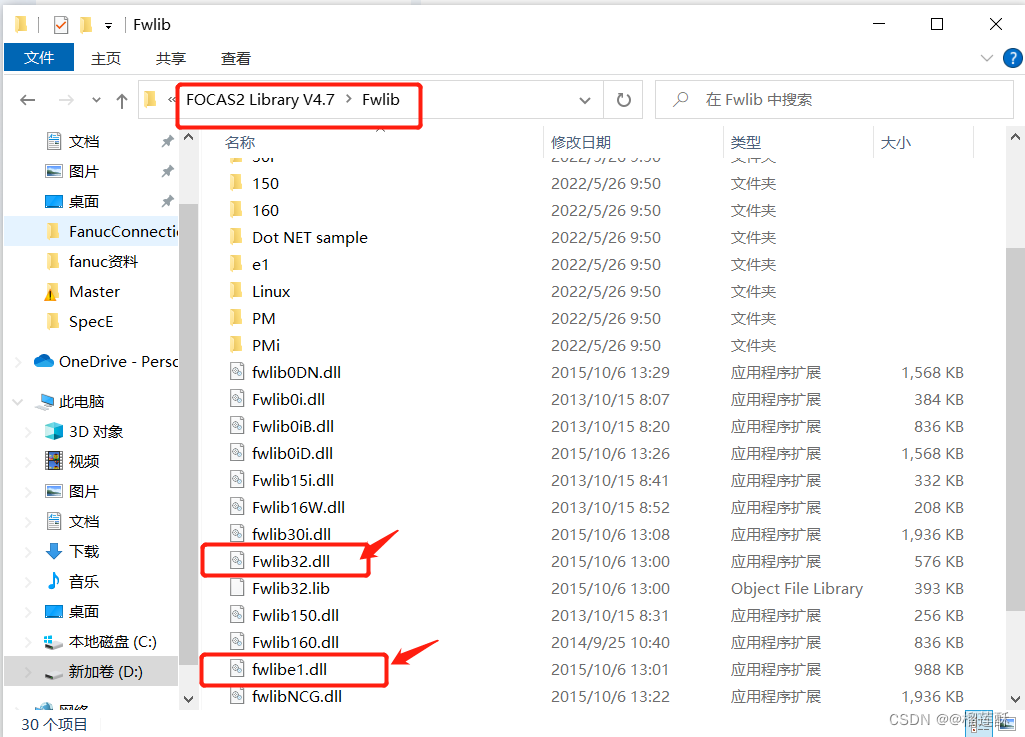
图5

图6
项目创建:
1.首先创建一个winform起名FanucFocasDemo,然后把fwlib32.dll,fwlib1.dll和fwlib32.cs复制到项目中
2.fwlib32.dll和fwlib1.dll2个DLL点击他们的属性,复制到输出目录选择始终复制,如图8。这样我们不管在重新生成项目文件或者清理后生成项目文件,dll都会在Debug/release文件下,这个时候Debug/release下面的可执行程序才可以调用到DLL

图7

图8
把生成的目标平台改成x86,不然就会报:System.BadImageFormatException:“试图加载格式不正确的程序。

3.连接,通过cnc_allclibhndl3方法进行连接
- private void connection_Click(object sender, EventArgs e)
- {
- this.ret = Focas1.cnc_allclibhndl3(ip, Convert.ToUInt16(port), Convert.ToInt32(timeout), out h);
- if (this.ret != Focas1.EW_OK)
- {
- //设备未连接上
- MessageBox.Show("设备未连接上");
- }
- else if (this.ret == Focas1.EW_OK)
- {
- MessageBox.Show("设备连接成功");
- }
- }
注意:
我们看下fwlib32.cs函数库的一个枚举(如图9):focas_ret
所有的数据请求,函数库都会返回一个请求结果(成功or失败)以及ref或者out出来的响应数据(如主轴信息、转速信息、加工信息等。)
请求结果为0代表请求成功,即以下的EW_OK,说明响应数据返回并且正确,负责全部为请求失败,详细问题看英文注释,如
EW_SOCKET = (-16), /* Windows socket error */代表了tcp Socket套接字错误,说明网络问题。
EW_NODLL = (-15), /* DLL not exist error */代表DLL未找到,查看是否引用或者程序同级目录有没有我上述讲到的两个dll库。各类原因我不一一解释,可以查阅翻译软件对英文进行翻译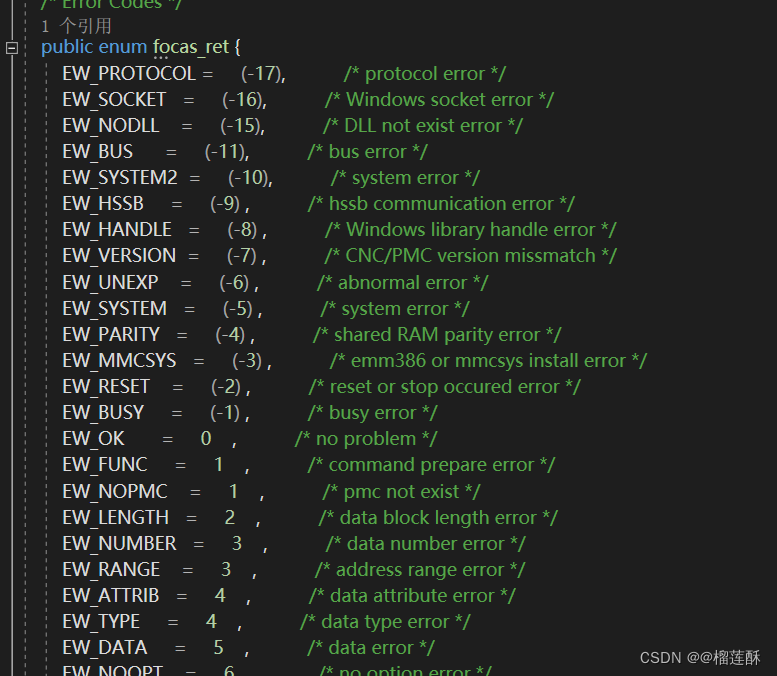
图9
4.采集,这个是我能采集到的数据如图10

图10
坐标:
- Focas1.ODBPOS fos = new Focas1.ODBPOS();
- short num = Focas1.MAX_AXIS;
- short type = -1;
- short ret = Focas1.cnc_rdposition(h, type, ref num, fos);
- if (ret == 0)
- {
- //绝对
- txtXAbsolutely.Text = (fos.p1.abs.data * Math.Pow(10, -fos.p1.abs.dec)).ToString();
- txtYAbsolutely.Text = (fos.p2.abs.data * Math.Pow(10, -fos.p2.abs.dec)).ToString();
- //相对
- txtXRelative.Text = (fos.p1.rel.data * Math.Pow(10, -fos.p1.rel.dec)).ToString();
- txtYRelative.Text = (fos.p2.rel.data * Math.Pow(10, -fos.p2.rel.dec)).ToString();
- }
系统信息:是
- Focas1.ODBSYS k1 = new Focas1.ODBSYS();
- ret = Focas1.cnc_sysinfo(h, k1);
- if (ret == Focas1.EW_OK)
- {
- MaxAxis = k1.max_axis.ToString();//最大轴数
- this.txtMaxAxis.Text = MaxAxis;
- string type1 = k1.cnc_type[0].ToString() + k1.cnc_type[1].ToString();//CNC类型
- #region 机床系统类型判断
- switch (type1)
- {
- case "15":
- CNCType = "Series 15/15i";
- break;
- case "16":
- CNCType = "Series 16/16i";
- break;
- case "18":
- CNCType = "Series 18/18i";
- break;
- case "21":
- CNCType = "Series 21/21i";
- break;
- case "30":
- CNCType = "Series 30i";
- break;
- case "31":
- CNCType = "Series 31i";
- break;
- case "32":
- CNCType = "Series 32i";
- break;
- case "35":
- CNCType = "Series 35i";
- break;
- case " 0":
- CNCType = "Series 0i";
- break;
- case "PD":
- CNCType = "Power Mate i-D";
- break;
- case "PH":
- CNCType = "Power Mate i-H";
- break;
- case "PM":
- CNCType = "Power Motion i";
- break;
- default:
- CNCType = "其它类型";
- break;
- }
- #endregion
- this.txtCNCType.Text = CNCType;
- MTType = k1.mt_type[0].ToString() + k1.mt_type[1].ToString();
- SerialNumber = k1.series[0].ToString() + k1.series[1].ToString() + k1.series[2].ToString() + k1.series[3].ToString();//CNC型号
- this.txtSerialNumber.Text = SerialNumber;
- Version = k1.version[0].ToString() + k1.version[1].ToString() + k1.version[2].ToString() + k1.version[3].ToString();
- Axis = k1.axes[0].ToString() + k1.axes[1].ToString();
- }

设备状态和工作模式:
- Focas1.ODBST statinfo = new Focas1.ODBST();
- ret = Focas1.cnc_statinfo(h, statinfo);
- if (ret == Focas1.EW_OK)
- {
- //设备状态的判定方法:如果Alarm不为0则有报警。当没有报警时,如果run=3认为是在运行,其他都为待机
- run = statinfo.run;
- Alarm = statinfo.alarm;
- //MTMode = statinfo.tmmode;
- if (Alarm != 0)
- run = 5;//5为设备报警状态
- this.txtDevStatus.Text = run.ToString();
- #region 工作模式判断
- switch (statinfo.aut)
- {
- case 0:
- CNCModel = "MDI";
- break;
- case 1:
- CNCModel = "MEMory";
- break;
- case 2:
- CNCModel = "Not Defined";
- break;
- case 3:
- CNCModel = "EDIT";
- break;
- case 4:
- CNCModel = "HaNDle";
- break;
- case 5:
- CNCModel = "JOG";
- break;
- case 6:
- CNCModel = "Teach in JOG";
- break;
- case 7:
- CNCModel = "Teach in HaNDle";
- break;
- case 8:
- CNCModel = "INC·feed";
- break;
- case 9:
- CNCModel = "REFerence";
- break;
- case 10:
- CNCModel = "ReMoTe";
- break;
- default:
- CNCModel = "others mode";
- break;
- }
- #endregion
- this.txtCNCModel.Text = CNCModel.ToString();
- }
报警数据:
- #region 报警数据
- ret = Focas1.cnc_alarm2(h, out almdsta);//Focas1.cnc_alarm2(h, out almdsta);
- if (ret == Focas1.EW_OK)
- {
- #region 报警判断
- switch (almdsta)
- {
- case 0:
- AlarmMessage = "参数开启(SW)";
- break;
- case 1:
- AlarmMessage = "关机参数设置(PW)";
- break;
- case 2:
- AlarmMessage = "I / O错误(IO)";
- break;
- case 3:
- AlarmMessage = "前景P / S(PS";
- break;
- case 4:
- AlarmMessage = "超程,外部数据(OT";
- break;
- case 5:
- AlarmMessage = "过热报警(OH)";
- break;
- case 6:
- AlarmMessage = "伺服报警(SV";
- break;
- case 7:
- AlarmMessage = "数据I / O错误(SR)";
- break;
- case 8:
- AlarmMessage = "宏指令报警(MC";
- break;
- case 9:
- AlarmMessage = "主轴报警(SP)";
- break;
- case 10:
- AlarmMessage = "其他警报(DS)";
- break;
- case 11:
- AlarmMessage = "有关故障防止功能(IE)的警报";
- break;
- case 12:
- AlarmMessage = "背景P / S(BG)";
- break;
- case 13:
- AlarmMessage = "同步错误(SN)";
- break;
- case 14:
- AlarmMessage = "保留";
- break;
- case 15:
- AlarmMessage = "外部报警信息(EX)";
- break;
- case 16:
- AlarmMessage = "正向超程(软限位1)";
- break;
- default:
- AlarmMessage = "未知错误";
- break;
- }
- #endregion
- }
- #endregion
消警
ret = Focas1.cnc_clralm(h, 0);主程序号和子程序号:
- Focas1.ODBPRO dbpro = new Focas1.ODBPRO();
- if (Focas1.EW_OK == Focas1.cnc_rdprgnum(h, dbpro))
- {
- Mainpg = dbpro.mdata;//主程序号
- this.txtMainpg.Text = Mainpg.ToString();
- Currentpg = dbpro.data;//当前运行程序号(子程序号)
- this.txtCurrentpg.Text = Currentpg.ToString();
-
- }
主轴实际转速:
- Focas1.ODBACT data = new Focas1.ODBACT();
- ret = Focas1.cnc_acts(h, data);
- if (ret == Focas1.EW_OK)
- {
- Speed = data.data.ToString();
- this.txtSpeed.Text = Speed.ToString();//单位r/min
- }
进给率F 切削实际速度:
- Focas1.ODBACT ff = new Focas1.ODBACT();
- ret = Focas1.cnc_actf(h, ff);
- if (ret == Focas1.EW_OK)
- {
- FeedRate = ff.data; //单位 mm/min
- this.txtFeedRate.Text = FeedRate.ToString();
- }
取刀具号 ,目前我试了没用:
- //short number = 1;
- //Focas1.IODBTLDT c = new Focas1.IODBTLDT();
- //ret = Focas1.cnc_rdtooldata(h, 1, ref number, c);
- //if (ret == Focas1.EW_OK)
- //{
- // if (c.data1 != null)
- // {
- // Tool_no = c.data1.tool_no;
- // }
- //}
进给倍率:
- Focas1.IODBPMC0 ig = new Focas1.IODBPMC0();
- ret = Focas1.pmc_rdpmcrng(h, 0, 1, 12, 13, 8 + 1 * 2, ig);
- if (ret == Focas1.EW_OK)
- {
- FeedOverRide = (100 - (ig.cdata[0] - 155)).ToString();//进给倍率 转换成百分比 为什么是155没搞懂,设备不同也可能不是155
- this.txtFeedOverRide.Text = FeedOverRide.ToString();
- }
单次工件计数 这个和控制板上的数量相对应 :
- Focas1.ODBM bb = new Focas1.ODBM();
- ret = Focas1.cnc_rdmacro(h, 0xf3d, 0x0a, bb);
- if (ret == Focas1.EW_OK)
- {
- string PartCnt = (bb.mcr_val / 100000).ToString();
- this.txtPartCnt.Text = PartCnt.ToString();
- }
工件总数:
- Focas1.IODBPSD_1 param6712 = new Focas1.IODBPSD_1();
- ret = Focas1.cnc_rdparam(h, 6712, 0, 8, param6712);
- if (ret == Focas1.EW_OK)
- {
- int totalparts = param6712.ldata;
- this.txttotalparts.Text = totalparts.ToString();
- }
时间:
- #region 获取切削时间
- Focas1.IODBPSD_1 param6753 = new Focas1.IODBPSD_1();
- Focas1.IODBPSD_1 param6754 = new Focas1.IODBPSD_1();
- ret = Focas1.cnc_rdparam(h, 6753, 0, 8 + 32, param6753);
- if (ret == Focas1.EW_OK)
- {
- int cuttingTimeSec = param6753.ldata / 1000;
- ret = Focas1.cnc_rdparam(h, 6754, 0, 8 + 32, param6754);
- if (ret == Focas1.EW_OK)
- {
- int cuttingTimeMin = param6754.ldata;
- int CutTime = cuttingTimeMin * 60 + cuttingTimeSec;
- this.txtCutTime.Text = CutTime.ToString();
- }
- }
- #endregion
- #region 获取运行时间
- Focas1.IODBPSD_1 param6751 = new Focas1.IODBPSD_1();
- Focas1.IODBPSD_1 param6752 = new Focas1.IODBPSD_1();
- ret = Focas1.cnc_rdparam(h, 6751, 0, 8, param6751);
- if (ret == Focas1.EW_OK)
- {
- int workingTimeSec = param6751.ldata / 1000;
- ret = Focas1.cnc_rdparam(h, 6752, 0, 8, param6752);
- if (ret == Focas1.EW_OK)
- {
- int workingTimeMin = param6752.ldata;
- int CycSec = workingTimeMin * 60 + workingTimeSec;
- this.txtworkingTime.Text = CycSec.ToString();
- }
- }
- #endregion
- #region 获取开机时间
- Focas1.IODBPSD_1 param6750 = new Focas1.IODBPSD_1();
- ret = Focas1.cnc_rdparam(h, 6750, 0, 8 + 32, param6750);
- if (ret == Focas1.EW_OK)
- {
- int PoweOnTime = param6750.ldata * 60;
- this.txtPoweOnTime.Text = PoweOnTime.ToString();
- }
上传NC程序,假设程序如下
- //程序内容,可以改成读文件流的方式
- string prg = "\nO8234\nM3 S1200\nG0 Z0\nG0 X0 Y0\nG1 F500 X120. Y-30.\nM30\n%";
- int len = 0;
- int n = 0;
- //开启上传流程
- ret = Focas1.cnc_dwnstart3(h, 0);
- if (ret != Focas1.EW_OK) return;
-
- len = prg.Length;
- while (len > 0)
- {
- n = len;
- //上传程序
- ret = Focas1.cnc_download3(h, ref n, prg);
- if (ret == (short)Focas1.focas_ret.EW_BUFFER)
- {
- continue;
- }
- if (ret == Focas1.EW_OK)
- {
- prg += n;
- len -= n;
- }
- if (ret != Focas1.EW_OK)
- {
- break;
- }
- }
- //结束上传流程
- ret = Focas1.cnc_dwnend3(h);
当前程序执行到哪行
- char[] prog = new char[1024];
- Focas1.IODBPSD_1 param_prog = new Focas1.IODBPSD_1();
- ushort length = 100;
- short blknum;
- ret = Focas1.cnc_rdexecprog(h, ref length, out blknum, prog);
主轴负载
- short b = 3;//轴数量
- Focas1.0DBSPLOAD sp = new Focas1.ODBSPLOAD();
- ret =Focas1.cnc_rdspmeter(h,-1,ref b,sp);
- if(ret == Focas1.EW_OK)
- deviceM.SpindleLoad = sp.spload1.spload.data.Tostring();
- #endregion
伺服负载
- short b = 3;//轴数量
- Focas1.ODBSVLOAD sv = new Focas1.ODBSVLOAD();
- ret = Focas1.cnc_rdsvmeter(h, ref b, sv);
- if (ret == Focas1.EW_OK)
- {
- crrunt = sv.svload1.data;
- crrunt1=sv.svload2.data;
- crrunt2=sv.svload3.data;
- crrunt3= sv.svload4.data;
- crrunt4 = sv.svload5.data;
- crrunt5 = sv.svload6.data;
- crrunt6 = sv.svload7.data;
- crrunt7 = sv.svload8.data;
-
-
- }
特别说明cnc_rdparam这个函数这个函数中的第二个参数要明白其含义,它代表的是机床PARAMETER参数表的序号。这个函数根据第二参数不同可以采集到很多信息,具体那些参数可以参考![]()
4.在Linux平台使用
Fwlib32.dll是在windows上运行的,如果你想在linux使用,以linux-arm系统为例。
1.把如图11路径中的libfw32lib.so.1.0.1复制到到项目中。重命名为libfw32lib.so
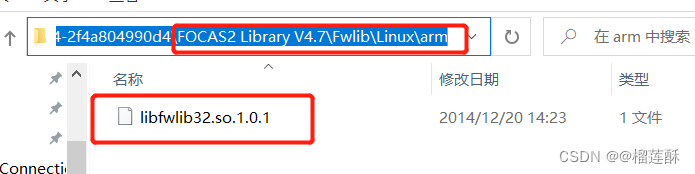
图11
2.现在查找 fwlib32.cs 的行查找所有文本实例fwlib32.dll"替换为libfwlib32.so"
3.在 fwlib32.cs中添加cnc_startupprocess和cnc_exitprocess(),如图12
- /* cnc_startupprocess for linux */
- [DllImport("libfwlib32.so", EntryPoint = "cnc_startupprocess")]
- public static extern void cnc_startupprocess(long level, string filename);
-
- /* cnc_exitprocess for linux */
- [DllImport("libfwlib32.so", EntryPoint = "cnc_exitprocess")]
- public static extern void cnc_exitprocess();
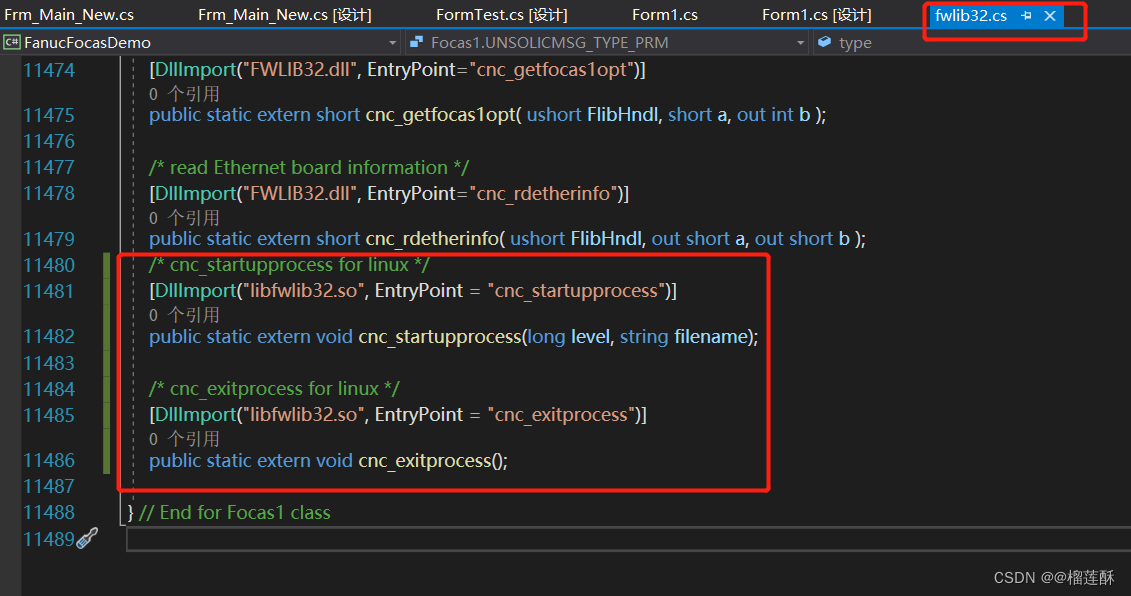
图12
4.在调用任何其他 fwlib32.cs 库函数之前调用此函数
long level = 3; string filename = "focas.log"; Focas1.cnc_startupprocess(level, filename);
5.调用之后,你可以使用下面的线连接,接下来你可以调用任何库函数最后使用完函数之后别忘了调用cnc_exitprocess函数退出。
参考博客:浅谈几种主流数控机床的数据采集技术 - it610.com


