
- 1一个简易的QQ魔法卡片炼卡消耗计算器_魔法卡片计算器
- 2黑马redis学习笔记_黑马redis原理篇笔记
- 3万亿国债消防救援——北斗应急通讯设备类目推荐
- 4【论文笔记】机器遗忘:错误标签方法_扰动标签的方法,该方法在每一次迭代过程中,将部分标签随机替换为错误标签
- 5jquery实现app开发闹钟功能_智能闹钟APP方案开发, 自己设定有趣铃声, 舒适唤醒效果!...
- 6无缝迁移!数亿MySQL数据顺利迁移到MongoDB_mysql 转mongofb
- 7基于Python爬虫的豆瓣电影影评数据可视化分析_电影影评分析及可视化
- 8网易Java面试必问:月薪20k+的Java面试都问些什么_java面试20k
- 9回忆自己的大学四年得与失_大学的得与失
- 10【深度学习】资源:最全的 Pytorch 资源大全_pytorch pt模型大全
fanuc机器人与视觉通信_要说工厂干起活来:工业机器人和数控机床才是真正的一对!...
赞
踩
我们常说团结就是力量,只有相互配合,才能把工作做得更加完美。这不仅仅适用于人类。
工业机器人和数控机床也是一样的,也是需要相互配合才能做好工作,提高工厂的生产效率。
所以今天要学习的是工业机器人和数控机床是怎么配合工作的?
以FANUC机器人为例。
FANUC机器人在电机外壳加工生产线上的应用过程,采用机器人自动上下料技术及利用iRVision视觉系统,合理地规划机器人运动轨迹,把工业机器人搬运技术及数控机床加工技术有机地组合起来,实现自动装卸工件、自动码放加工成品,实现产品的高精度、高效率和低成本加工。
1、FANUC机器人
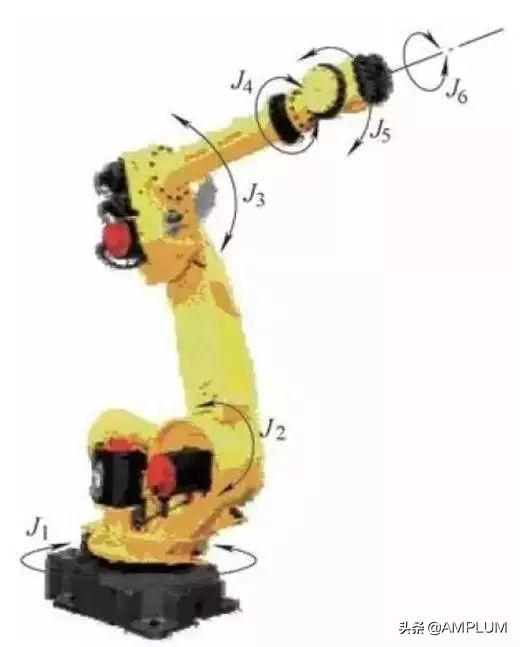
自动加工生产线配置了两台FANUC Robot M-20iA搬运系统机器人,其中一台机器人作为行走机器人R1,使用FANUC伺服电动机αiF12/3000控制,通过精密减速机、齿轮及齿条进行传动,重复精度高,可以轻松适应机床在导轨两侧布置的方案。
主要用于毛坯工件的抓取、机床上料、加工工序间工件抓取以及加工成品卸除并运送到传输带上。
另一台固定机器人R2结合FANUC独有的智能机器人技术(iRVision视觉功能),用于下料,在料筐里码放加工成品。
FANUC Robot M-20iA机器人各环节每一个结合处为一个关节点或坐标系,其外形及各关节位置如下图所示。
2、自动加工线设备布置
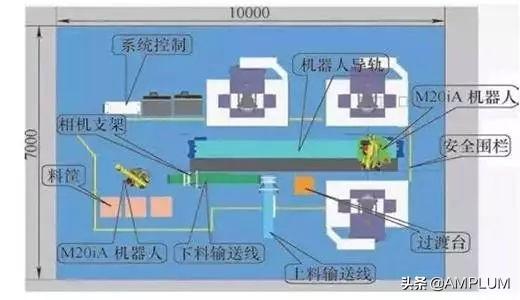
电机外壳自动加工生产线由上料输送带和下料输送带(分别配置iRVision视觉系统)、行走机器人R1(导轨式)、固定机器人R2、两台VM850立式加工中心、一台CLX360数控车床、成品料筐和系统控制柜等组成,各设备布置如下图所示。
3、 数控加工工艺
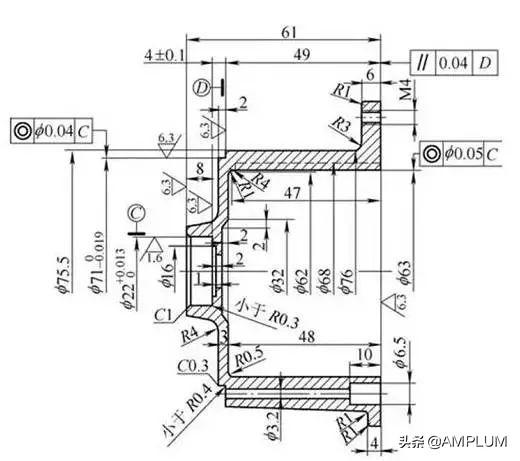
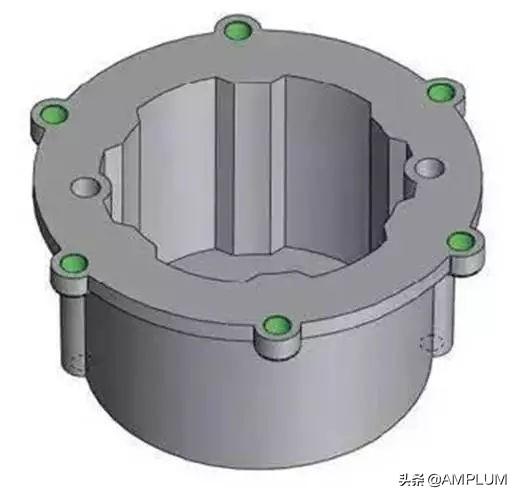
工件为电机外壳, 如下图所示, 为大批量生产, 材料是ADC12铝合金。加工内容包含端面铣削钻孔、攻螺纹和内孔车削等内容。
零件加工工序内容分配如下:
(1)VM850立式加工中心1进行M4螺纹底孔钻孔、M4螺纹攻螺纹及铣削外圆凸台工序加工,如下图所示。

(2)VM850加工中心2进行钻6个φ 5.5mm的通孔、孔口倒角工序加工,如下图所示。
(3)CLX360数控车床进行内孔及台阶孔、孔口倒角工序加工,如下图所示。

此外, 还需要设计专用夹具, 加工中心夹具采用内夹方式,数控车床采用外夹方式。
4、机器人自动上下料动作设计
根据工件的外形特点设计机器人气动手爪部件,包含气动、传感器及机械部件等。工件加工工艺流程如下:
①毛坯工件摆放在上料传送带上。
②行走机器人R1复合手爪抓取毛坯工件,行走到加工中心位置,将工件安装到加工中心的专用夹具上,如下图所示。
③待加工中心1加工完成后,行走机器人R1复合手爪取下工件,行走到加工中心2位置,将工件安装到加工中心2的专用夹具上,如下图所示。
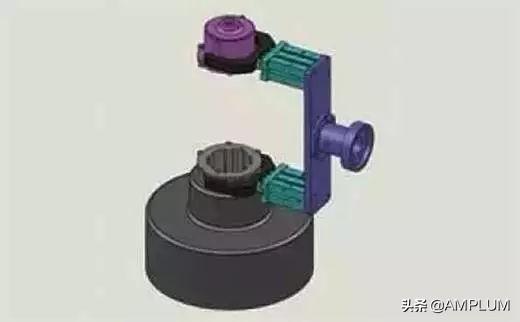
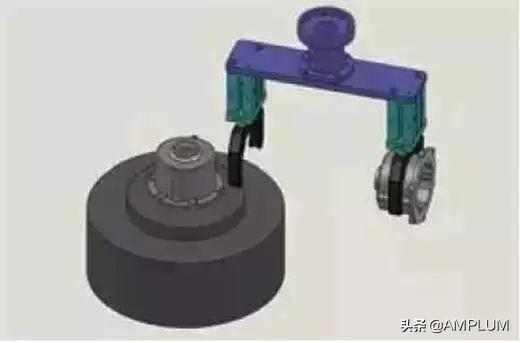
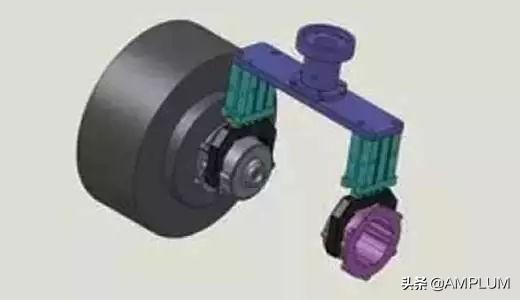
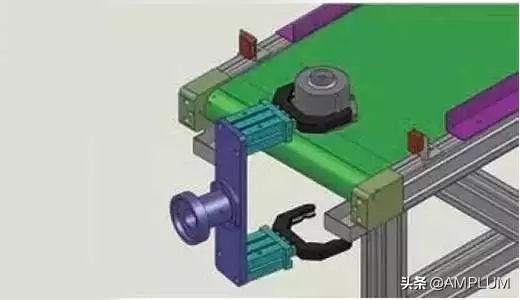
④待加工中心2加工完成后,行走机器人R1取下工件到数控车床位置,将工件安装到专用夹具上,如图9所示。待工件加工完成后取下工件,机器人行走到工件翻转台位置,进行工件翻转、交换,如下图所示。
⑤工件在翻转台进行交换后,机器人R1把加工成品放置在下料传送带上,如图11所示,由机器人R2进行工件下料、自动码放在成品料筐中,如下图所示。
至此, 结束一个完整的加工流程。各加工工序有相应的节拍,经过调整CNC加工程序以及机器人动作程序后,可实现数控机床加工与机器人上下料的完美组合。
5、 专用夹具设计
依据三台数控机床各自的加工工序任务,设计三套组合气动夹具,介绍如下。
(1)立式加工中心1专用夹具:立式加工中心1进行钻孔、攻,如下图所示。
(2) 立式加工中心2 专用夹具:立式加工中心2进行钻6个φ 5.5mm的通孔、孔口倒角工序加工,设计以气动三爪自定心卡盘夹紧工件,以两个弹性V形块定向的夹具,如下图所示。
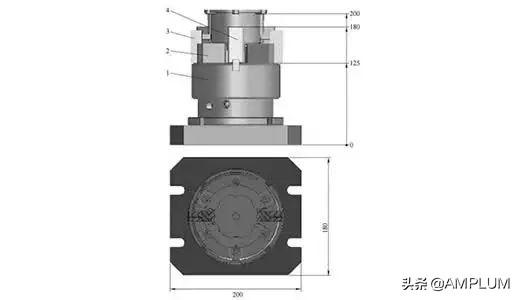
1.启动卡盘 2.支承块 3.弹性V形块 4.特制卡爪
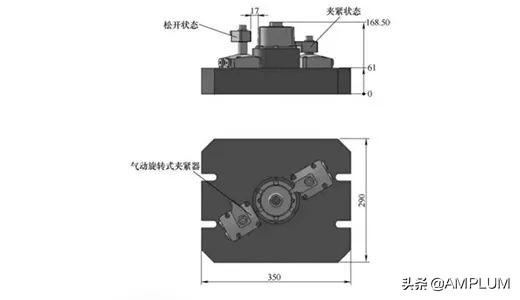
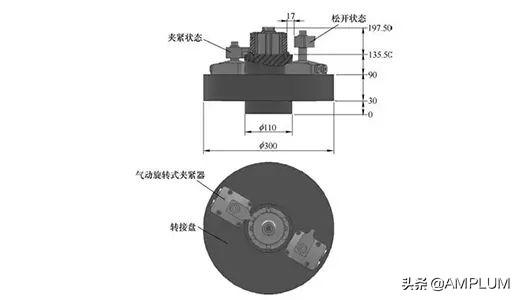
(3)数控车床专用夹具:数控车床进行内孔及台阶孔、孔口倒角工序加工,设计以一面两销定位工件、以气动旋转夹紧器夹紧方式的夹具。
6 、机器人、P LC与数控机床的接口
为保证机器人与数控机床的安全配合,要建立机器人、PLC以及数控机床之间安全可靠的通信连接。
在硬件方面,通过屏蔽电缆将三者之间相应的输入与输出点进行连接。软件方面,通过机器人专用软件、PLC接口,采集机床和机器人当前状态,编写相应的符合上下料逻辑的控制程序,最终达到数控机床与机器人的有效通信。
重点需要处置紧急停止信号、数控机床准备完成信号、机器人手爪气动信号、数控机床夹具松夹信号以及安全门信号等,数控机床状态监控画面如下图所示。

随着工业机器人的应用越来越广泛,应用技术也越来越高,因此工业机器人自动上下料机构作为数控机床辅助部件,越来越受到机床制造商和用户的重视。
通过机器人和数控机床的紧密配合,保证系统加工过程的紧密性,降低了工人的劳动强度,大大提高了工作效率,具有较好的应用价值。
免责声明:本文系网络转载或改编,版权归原作者所有。如涉及版权,请联系删除!


